Zaloguj
Zaloguj




Większość powyższych funkcji realizowana jest poprzez dwa zgoła niepozorne złącza oznaczone, jako CP (Control Pilot) i PP (Proximity Plug – rysunek 1).
CP – Przewód sterujący (Control Pilot)
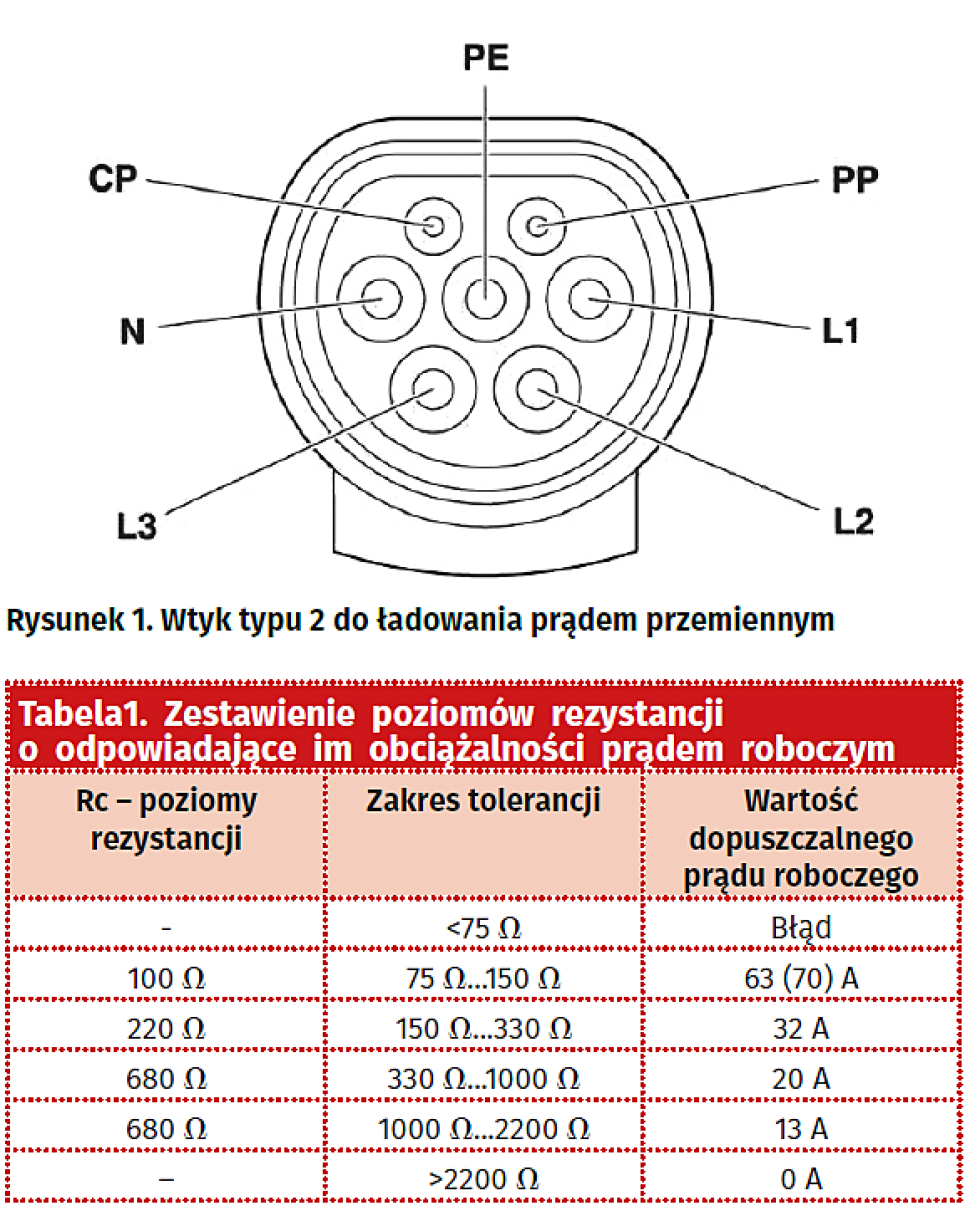
Za pośrednictwem przewodu sterującego CP (rysunek 2) jest przeprowadzana dwukierunkowa komunikacja pojazdu z infrastrukturą ładującą Ta ostatnia rozpocznie ładowanie tylko wtedy, gdy zostaną odebrane następujące informacje:
- Prawidłowe połączenie z pojazdem.
- Prawidłowe uziemienie pojazdu.
- Wskazanie maksymalnej mocy dozwolonej przez ładowarkę w górnym, dopuszczalnym zakresie prądu.
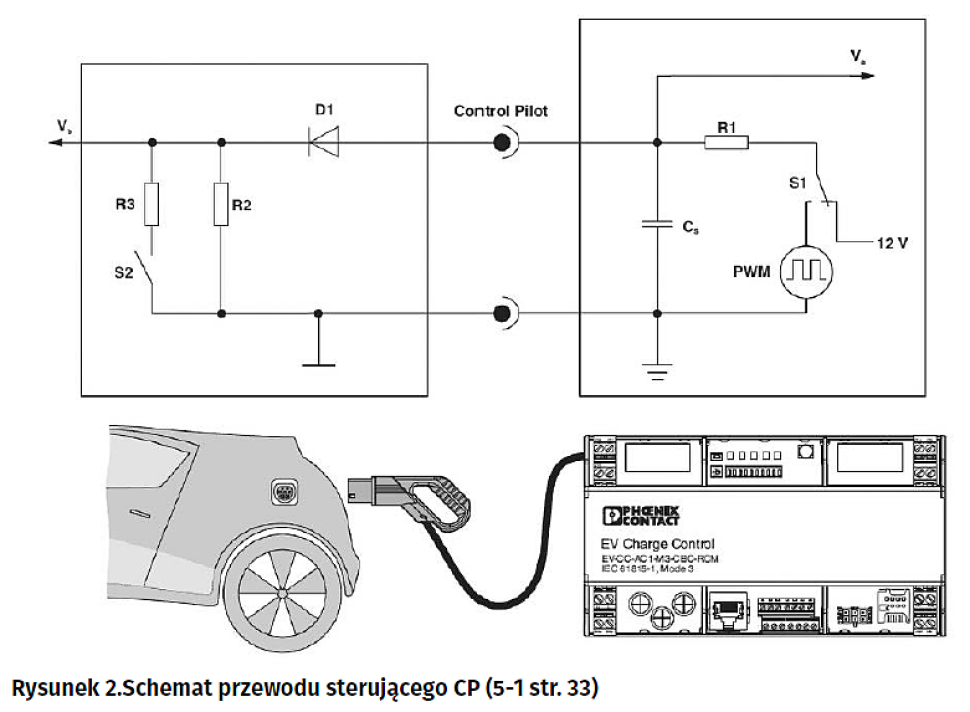
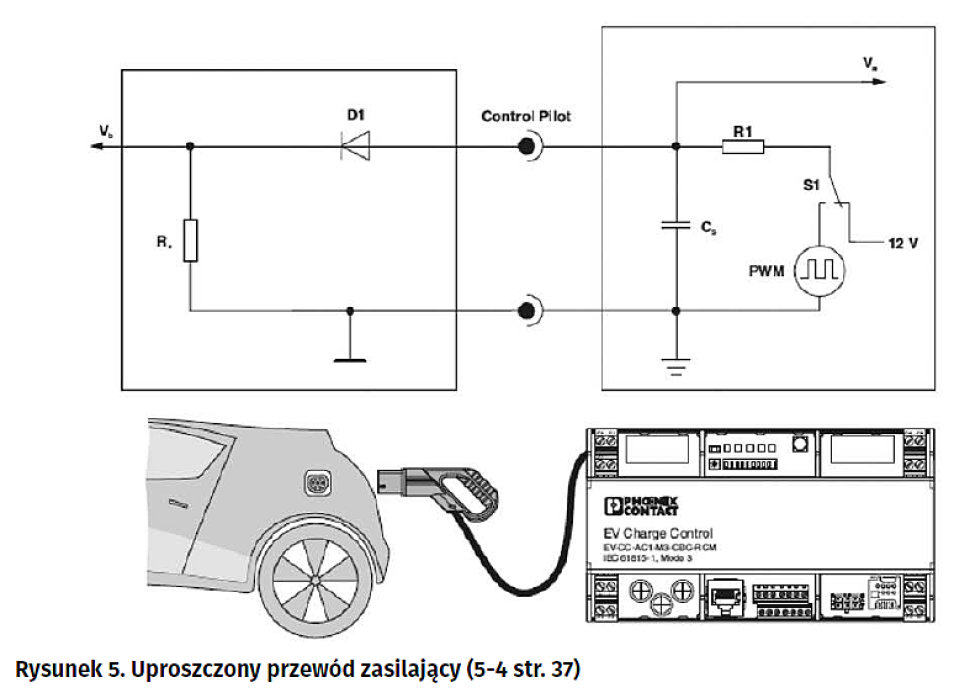
Poprzez złącze CP urządzenie określa dopuszczalną wartość prądu ładowania, która jest zakodowana, jako sekwencja sygnału PWM (rysunek 3). Pojazd wskazuje aktualny status za pomocą wartości napięcia Va (napięcie mierzone przez układ kontrolny stacji ładowania). Dopuszczalna wartości prądu ładowania przypisana konkretnej szerokość impulsu sygnału PWM oraz wartości napięcia do stanów pojazdu została zdefiniowana w normie IEC 61581-1:
B1 –Wartość napięcia na przewodzie CP jest wynikiem szeregowego połączenia rezystora R1 w kontrolerze ładowania, diody D oraz rezystora R2 w pojeździe. Taka sekwencja wzajemnie ze sobą połączonych elementów skutkuje spadkiem napięcia do poziomu 9 V. Wówczas taki stan określa, że pojazd został podłączony do punku ładowania. Następuje przełączenie styku S1 a sygnał PWM o określonej szerokości informuje układ ładowania pojazdu o dopuszczalnym prądzie, który może pobrać.
B2 – Proces ładowania można zostać przerwany przez EVSE lub przez pojazd. Stacja ładowania wyłącza sygnał PWM i sygnalizuje koniec procesu. Pojazd otwiera styk S2 i kontroler odłącza stycznik, a wraz z nim napięcie zasilające pojazd. Jeśli S2 nie jest otwarty to w ciągu 5 sekund po wyłączeniu sygnału PWM, proces ładowania jest zatrzymany, niezależnie od statusu, w którym znajduje się pojazd. Proces również może zostać zakończony przez układ kontrolujący zasilanie bezpośrednio w samochodzie. Wówczas odłączany jest rezystor R3 za pośrednictwem S2. Pojazd przerywa proces ładowania i otwiera styk S2. Kontroler ładowania odłącza stycznik, tym, samym zdejmuje napięcie w gnieździe lub wtyku.
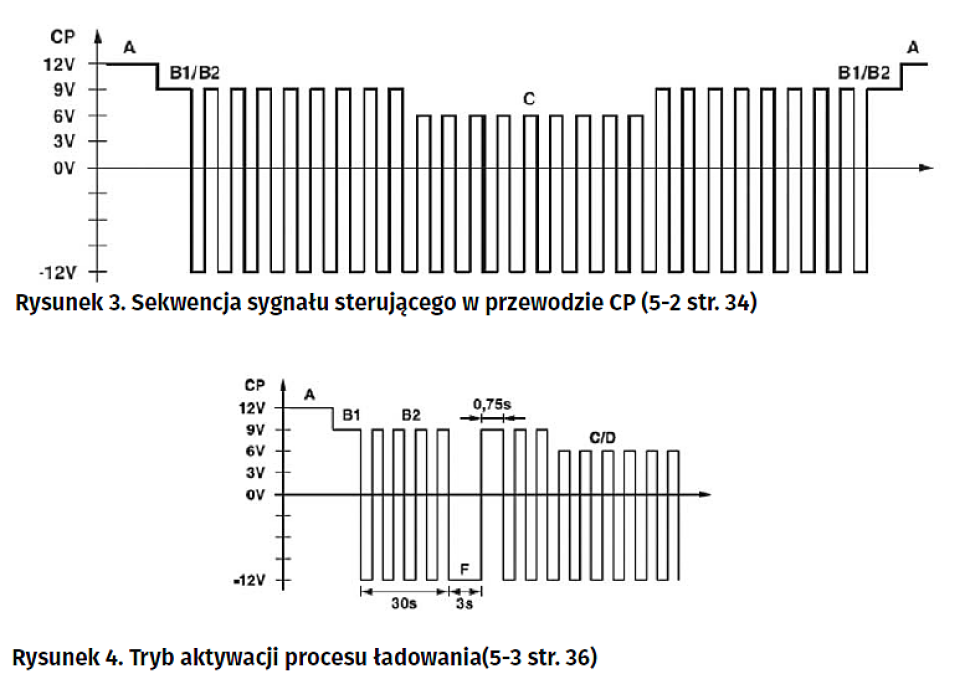
Tryb aktywacji
Jeśli podłączony pojazd przełącza się z status B1 (9 V DC) na status B2 (9 V PWM) i nie wchodzi w stan C , wówczas w ciągu 30 sekund, kontroler realizuje odłączenie pojazdu od stacji ładującej. Sygnał CP przez 3 sekundy przyjmuje wartość –12 V DC. Następnie przełącza się z powrotem na modulację PWM. Po przejściu ze stanu A1 lub B1 do statusu B2 proces ten jest wykonywany nie więcej niż raz.
Tryb aktywacji wykonywany jest ponownie:
- jeśli pojazd jest odłączony od sterownika ładowania, a następnie ponownie dołączony,
- lub jeżeli proces ładowania został przerwany przez stację ładującą (np. przez system monitorujący obciążenie).
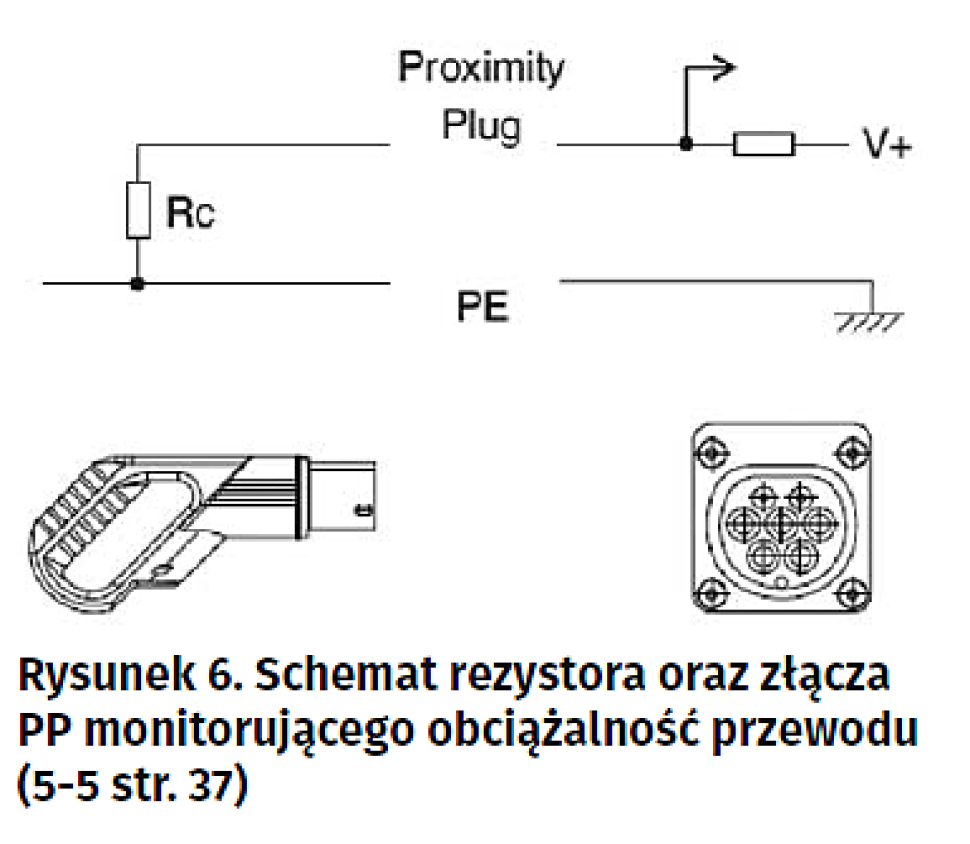
PP – Styk probierczy (Proximity Plug)
Bezpośrednie tłumaczenie oznacza „wtyczkę zbliżeniową”, która służy do wykrywania złącza ładowania w stacji ładującej i do określania jego aktualna dopuszczalnej obciążalności (rysunek 6). Stanowi on zabezpieczenie przed uszkodzeniem izolacji roboczej przewodu, co w konsekwencji może prowadzić do pożaru lub niebezpiecznego w skutkach porażenia prądem elektrycznym.
Bieżąca obciążalność jest określona zgodnie z IEC 61851-1 za pomocą rezystora wzorcowego Rc, który jest zainstalowany na stałe w kablu zasilającym. Kontroler EVSE sprawdza wartość rezystancji za pomocą kanału PP (Proximity Plug) i określa na podstawie rezystancji bieżącą obciążalność prądową podłączonego kabla zasilającego. Kodowanie dopuszczalny prąd dla wartości rezystancji określony jest w normie IEC 61851-1.
Lider Zespołu Szkoleń i Wsparcia Technicznego
akralewski@phoenixcontact.pl