Zaloguj
Zaloguj



Aby móc skorzystać z opisywanego we wstępie algorytmu ładowania należy wykonać odpowiednie obwody stabilizujące prąd oraz napięcie ładowania. Zgodnie z teorią, do ładowania akumulatora wystarczy stabilizator napięcia mający możliwość pracy w następujących zakresach:
- Przy ładowaniu akumulatora Pb 6 V: 7,2...7,5 V.
- Przy ładowaniu akumulatora Pb 12 V: 14,4...15 V.
- Przy ładowaniu akumulatora Pb 24 V: 28,8...30 V.
Wymagany jest przy tym obwód pomiarowy prądu, który będzie dbał o przepływ prądu o stałym natężeniu podczas ładowania. W praktyce można użyć liniowego stabilizatora typu np. LM723, dzięki któremu będzie możliwe utrzymanie stałego prądu ładowania oraz napięcia odcięcia.
Wadą stabilizatorów liniowych jest ich mała sprawność oraz duże ilości ciepła wydzielane w elemencie mocy. Pociąga to za sobą potrzebę stosowania wydajnych układów chłodzenia. Dużo lepszym rozwiązaniem jest zastosowanie stabilizatora impulsowego, którego sprawność jest bardzo wysoka, a wydzielana ilość ciepła stosunkowo niewielka. Pozwala to wykonać poręczną, lekką ładowarkę mającą duży prąd wyjściowy. W swoim projekcie wykorzystałem przepustową przetwornicę prądu stałego.
Budowa i zasada działania
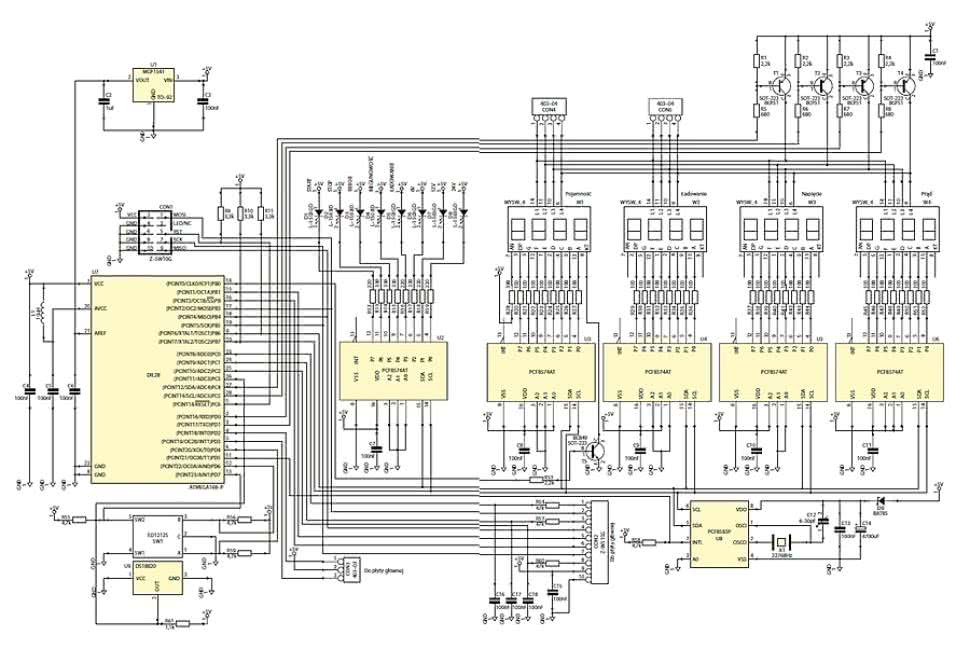
Rysunek 1. Schemat ideowy panelu czołowego
Ładowarka składa się z dwóch płytek: czołowej będącej interfejsem użytkownika i głównej zawierającej obwody mocy ładowarki. Schemat ideowy płyty czołowej (panelu sterowania) pokazano na rysunku 1. Na płycie czołowej zamontowano mikrokontroler, w którym jest zaszyty program sterujący pracą ładowarki.
Dzięki jego użyciu można było w znacznym stopniu zautomatyzować proces ładowania i ograniczyć obsługę urządzenia tylko do włączenia lub wyłączenia ładowarki oraz ustawienia pojemności ładowanego akumulatora. Na tej płycie zamontowano cztery wyświetlacze LED, na których są wyświetlane:
- W1 - zadana pojemność znamionowa ładowanego akumulatora.
- W2 - ładunek elektryczny przesłany do akumulatora w trakcie procesu ładowania. Wskaźnik ten może służyć do oceny stopnia zużycia akumulatora.
- W3 - napięcie akumulatora.
- W4 - prąd ładowania akumulatora.
Diody LED są wskaźnikami statusu ładowarki i oznaczają:
- START (D1) - praca ładowarki i rozpoczęcie procesu ładowania akumulatora.
- STOP (D2) - praca ładowarki jest zatrzymana, a akumulator nie jest ładowany.
- ERROR (d3) - awaria lub błąd procesu ładowania.
- BIEGUNOWOŚĆ (D4) - zła polaryzacji akumulatora.
- ŁADOWANIE (D5) - ciągłe świecenie oznacza, że akumulator jest ładowany prądem 0,1×C z odcięciem napięcia. Miganie oznacza doładowywanie akumulatora prądem 0,05×C z odcięciem napięcia.
- 6 V (D6) - akumulator o napięciu znamionowym 6 V.
- 12 V (D7) - akumulator o napięciu znamionowym 12 V.
- 24 V (D8) - akumulator o napięciu znamionowym 24 V.
Impulsator SW1 jest ostatnim elementem komunikacji ładowarki z użytkownikiem. Służy do włączania jak i wyłączania ładowarki, przejścia w tryb ustawiania aktualnej godziny poprzez przyciśnięcie ośki impulsatora, oraz ustawienie zadanej pojemności znamionowej akumulatora poprzez obracanie pokrętła. Na płycie czołowej jest umieszczony cyfrowy czujnik temperatury U9. Po prawidłowym podłączeniu akumulatora do ładowarki odczytuje on temperaturę otoczenia i odpowiednio kompensuje napięcie ładowania o:
- -12 mV/°C dla akumulatora Pb 6 V.
- -24 mV/°C dla akumulatora Pb 12 V.
- -48 mV/°C dla akumulatora Pb 24 V.
Współczynnik korekcji wynosi -4 mV/°C na ogniwo, co jest wartością optymalną, ponieważ według dostępnych informacji może on zawierać się w granicach od -3...-5 mV/K na ogniwo.
Zegar czasu rzeczywistego U8 ma dwojakie zadanie. W trybie czuwania ładowarki ten układ odmierza czas, a aktualna godzina jest pokazywana na wyświetlaczu W1. Podczas ładowania jego wyjście INT taktuje procesem obliczania ładunku oraz służy do sterowania dwukropkiem wyświetlacza.
Mikrokontroler mierzy kilka napięć mających wpływ na prawidłową pracę ładowarki oraz na przebieg procesu ładowania. Napięcie odniesienia dla przetwornika A/C zostało doprowadzone na wejście AREF procesora i odfiltrowane przez kondensator C6.
Jako źródło napięcia odniesienia służy układ U1, który dostarcza napięcie 4,096 V. Na płycie czołowej jest dostępna magistrala I²C do komunikacji z zegarem U8. Użyto jej do sterowania pracą wyświetlaczy i diod LED. Zastosowanie ekspanderów typu PCF8574 oraz multipleksowania wyświetlaczy znacznie ogranicza wykorzystanie portów procesora.

Rysunek 2. Schemat ideowy przetwornicy ładowarki
Schemat płyty głównej pokazano na rysunku 2. To na niej znajduje się przepustowa przetwornica impulsowa. W trybie czuwania rolę zasilacza pełni pomocniczy transformator sieciowy dołączony do złącza CON7. Musi on mieć napięcie wyjściowe 9...12 V i mocy minimalną 4 VA. Napięcie przemienne zostaje wyprostowane przez mostek złożony z diod D18, D21, D22, D23 i filtrowane przez kondensator C36.
Diody D19 i D20 stanowią zawory jednokierunkowe. W danej chwili przewodzi tylko ta dioda, na której występuje wyższe napięcie. Podczas czuwania na anodzie diody D20 nie ma napięcia, więc prąd poprzez diodę D19 i zasila stabilizator U14. Stabilizator zasila płytę czołową i dostarcza +5 V do zasilania wtórników napięciowych U10 i U13.
Napięcie sieciowe jest doprowadzone do złącza CON1. Gdy ładowarka zostanie włączona, optotriak U2 przewodzi i załącza triak U3. Warystor VR1 chroni triak przed przepięciem podczas wyłączania transformatora. Po załączeniu triaka prąd przepływa przez włączony równolegle ze stykami przekaźnika Prz1 rezystor R2, który łagodzi prąd płynący podczas ładowania się kondensatorów.
Napięcie do zasilania uzwojenia pierwotnego transformatora jest wyprowadzony na złącze CON2. Transformator, który zastosowałem ma moc 200 VA i dwa uzwojenia wtórne dostarczające napięcie po 30 V każde i obciążalności ok. 3,3 A. Napięcie z uzwojeń wtórnych jest doprowadzone na złącze CON3, a z niego trafia do prostownik złożony z 8 diod Schottky.
Filtr za prostownikiem jest złożony z kondensatorów C4...C13 (6,8 mF) o małym LSR. Odfiltrowane napięcie trafia poprzez rezystor R4 na dzielnik rezystancyjny oraz zasila stabilizator dostarczający +12 V z układem LM2575. Układ ten został wyposażony w obwód detekcji napięcia zasilania złożony z diody D5, tranzystora T1 oraz rezystorów R5, R6 i R12.
Gdy napięcie zasilania przekracza +28 V, zasilacz startuje i dostarcza napięcie +12 V zasilające sterownik U8, driver U7 oraz układ aktywnego chłodzenia. Zastosowanie przetwornicy impulsowej okazało się konieczne ze względu na duże napięcie wejściowe oraz spory prąd pobierany z szyny +12 V.
Dzielnik złożony z rezystorów R1, R3 i diody D1 umożliwia pomiar napięcia przez mikrokontroler. Pozwala to na pomiar obciążenia ładowarki i informuje o prawidłowym funkcjonowaniu obwodów zasilania. Ważną funkcję pełni detektor złożony z rezystorów R11, R13 oraz programowanej diody Zenera U4.
Monitoruje on wzrost napięcia na kondensatorach podczas ich ładowania zaraz po załączeniu transformatora sieciowego. Jak wspomniałem, prąd sieci płynie poprzez rezystor R2 - jego rezystancja włączona szeregowo z uzwojeniem pierwotnym transformatora ogranicza płynący prąd uzwojenia pierwotnego. Tym samym prąd ładowania kondensatorów jest ograniczony, co powoduje ich powolne ładowanie.
Po przekroczeniu napięcia +36 V na kondensatorach filtrujących, dioda U4 zaczyna przewodzić i załącza przekaźnik Prz1, co powoduje ominięcie zwarcie rezystora R2 i pracę z pełną wydajnością. Łatwo domyślić się, że opisywany obwód zapewnia łagodny start oraz - dodatkowo - zabezpiecza ładowarkę przed przeciążeniem.
Jeśli ładowarka zostanie przeciążona spowoduje to spadek napięcia poniżej +36 V i przekaźnik Prz1 zostaje rozłączony. Prąd sieci płynie poprzez rezystor R2, co powoduje dalszy spadek napięcia. Wartość napięcia za dzielnikiem R1, R3 jest zinterpretowana przez program sterujący jako błąd w układzie zasilania, co powoduje przerwanie procesu ładowania i zaświecenie się odpowiednich lampek ostrzegających o wystąpieniu przeciążenia.
Napięcie zasilania jest podawane na tranzystor T2, który jest kluczem elektronicznym przetwornicy przepustowej. Wykorzystałem tu tranzystor z kanałem typu N, ponieważ ma mniejszą rezystancję RDS(on). Niestety, skomplikowało to układ sterowania tranzystorem.
Za tranzystorem T2 znajduje się dioda usprawniająca Schottky D15 Dławik L2 gromadzi energię podczas przewodzenia T2, którą później oddaje do obciążenia, gdy tranzystor nie przewodzi. Dławik ma indukcyjność 47 µH i prąd nasycenia rzędu 30 A.
Za cewką jest włączony kondensator filtrujący C15 o małym LSR i bocznik do pomiaru prądu złożony z połączonych równolegle rezystorów R14, R15, R17, R18 i R21. Za bocznikiem włączono kolejny kondensator (LSR) i dzielnik rezystancyjny złożony z R16 i R19 oraz styki przekaźnika wyjściowego Prz2.
Do styków NC jest dołączony rezystor R20 (wykorzystany do startu przetwornicy). Styki NO są połączone ze złączem konektorowym CON4, które za złączem CON5 stanowi wyjście dla ładowanego akumulatora.
Napięcie z dzielnika po odfiltrowaniu przez C17 trafia na wtórnik napięciowy ze wzmacniaczem U5. Napięcie wyjściowe tego wtórnika jest informacją dla mikrokontrolera o wartości napięcia ładowania akumulatora. Trafia ono na wejście nieodwracające pierwszego komparatora zawartego w strukturze sterownika U8.
Wzmacniacz U6 mierzy spadek napięcia na boczniku prądowym i steruje tak tranzystorem T6, aby prąd płynący przez rezystor R23 był proporcjonalny do spadku napięcia na boczniku. Na wejściach tego wzmacniacza występuje napięcie ładowanego akumulatora i może osiągać 33 V.
Z tego względu został ona zasilony dodatkowym napięciem +36 V (dioda U16 i rezystory R48...R50). Prąd przepływający przez rezystor R37 jest taki sam, jak przez rezystor R23, a rezystancja R37 jest 10 razy większa od rezystancji R23, więc spadek napięcia na R37 jest dziesięciokrotnie większy niż spadek napięcia na boczniku.
Kondensator C28 filtruje napięcie będące informacją o płynącym prądzie. Jest ono podawane na wejście wtórnika napięciowego U9, którego napięcie wyjściowe jest informacją dla mikrokontrolera o prądzie ładowania oraz jest podawane na wejście nieodwracające drugiego komparatora zawartego w U8.
Wtórniki napięciowe U10 i U13 z filtrami RC są przetwornikami A/C. Na wejścia filtrów złożonych z R32 i C30 oraz R38 i C32 są podawane przebiegi PWM z procesora. Wypełnienie przebiegów jest wyznaczane na podstawie napięcia, pojemności, trybu ładowania oraz temperatury otoczenia.
Przebiegi PWM są uśredniane przez filtry, co prowadzi do tego, że na wejścia wtórników U10 i U13 jest podawane napięcie stałe. Po wzmocnieniu jest ono podawane na wejścia odwracające komparatorów zawartych w U8.
Do sterowania pracą przetwornicy przepustowej wykorzystano sterownik typu TL494. Pracuje on z częstotliwością kluczowania 45 kHz, którą ustanawiają elementy R36 i C25. Sterownik wyposażono w układ miękkiego startu (zwłoka około 5 s). Ten czas ustalają elementy C21 i R35. Oba komparatory zawarte w strukturze sterownika U8 są wyposażone w sprzężenia zwrotne.
Komparator pierwszy odpowiada za stabilizowanie napięcia wyjściowego - jest do niego podłączona pętla sprzężenia składająca się z R29, R31, R34 i C22. Rezystory R31 i R34 ustalają wzmocnienie dla składowej stałej, a rezystory R29, R34 i pojemność C22 - wzmocnienie dla składowej zmiennej. Komparator drugi odpowiada za stabilizowanie prądu ładowania. Dołączono do niego sprzężenie pojemnościowe w postaci kondensatora C40, co zapobiega piszczeniu dławika podczas stabilizowania prądu.
Pomiędzy wyjście komparatorów FEBACK, a napięcie referencyjne sterownika włączono dwójnik szeregowy RC składający się z rezystora R51 i kondensatora C39. Jego zadaniem jest tłumienie szybko zmieniających się przebiegów na końcówce FEBACK, co zapewnia lepszą stabilność napięcia i prądu wyjściowego ładowarki.
Niestety, spowalnia reakcję na zmiany obciążenia, ale w ładowarce akumulatorów nie ma to znaczenia. Ponieważ tranzystor kluczujący T2 ma kanał typu N konieczne stało zastosowanie drivera U7 sterującego bramką tego tranzystora. Driver dba o szybkie przeładowanie pojemności bramki, co zmniejsza straty mocy w tranzystorze. Rezystor R22 ogranicza prąd ładowania bramki. Sterowanie drivera dołączono do emiterów tranzystorów w U8.
Zastosowanie drivera ma jedną wadę - przetwornica bez dołączonego obciążenia nie chce startować z tego powodu, że "wiszące w powietrzu" wyjście nie powoduje naładowania się kondensatora C20, w którym jest gromadzony ładunek potrzebny do sterowania bramką tranzystora.
Jeśli więc ładunek nie zgromadzi się, tranzystor nie zostaje wysterowany w związku z tym przetwornica nie pracuje. Tu okazuje się niezbędny rezystor R20, o którym wspominałem wcześniej. Gdy przekaźnik Prz2 nie jest załączony, rezystor jest połączony z wyjściem przetwornicy. Prąd zasilania drivera przepływa przez diodę D16 i jest podawany na dodatni biegun kondensatora C20.
Biegun ujemny jest połączony z rezystorem R20, co zamyka obwód i ładuje kondensator. Zgromadzony ładunek powoduje wysterowanie tranzystora kluczującego i pracę przetwornicy. Po określonym czasie w programie sterującym przekaźniki Prz2 zostaje załączony i prąd płynie nie do rezystora R20 tylko do ładowanego akumulatora.
Nasuwa się pytanie, dlaczego zamiast zamykać obwód kondensatora C20 przez rezystor nie został zamknięty przez ładowany akumulator? Wyobraźmy sobie, że tak zostało zrobione. Przekaźnik Prz2 jest załączony, a przetwornica nie wystartowała.
Akumulator, który został przyłączony ma napięcie +12 V spowoduje, że pojawi się ono na okładzinie ujemnej kondensatora C20. Na okładzinie dodatniej jest również napięcie wynoszące ok. +12 V. Wynika z tego, że napięcie na kondensatorze ma wartość 0 V, czyli nie ma ładunku potrzebnego do sterowania bramką tranzystora i przetwornica nie wystartuje. Jeszcze gorzej, gdy zostanie dołączony akumulator o napięciu +24 V. Kondensator naładuje się napięciem -12 V, co może spowodować uszkodzenie drivera oraz tranzystora kluczującego.
Kolejnym elementem wymagającym opisu jest detektor prawidłowego dołączenia akumulatora do ładowarki. Składa cię on z transoptorów U11, U12, tranzystorów T8, T9, diod D25, D26 oraz rezystorów R33, R39...R42, R46, R47. Jeśli akumulator jest dołączony prawidłowo, to napięcie z bieguna dodatniego jest doprowadzone do złącza konektorowego CON10.
Prąd płynie przez rezystor R33 i trafia na dwie diody półprzewodnikowe, lecz tylko dioda D25 przewodzi. Dalej, jest zasilany stabilizator złożony z tranzystorów T8, T9 oraz rezystorów R46, R47. Rezystor R47 jest odpowiedzialny za ustalenie prądu stabilizacji na ok. 20 mA. Prąd po przejściu przez stabilizator trafia na diodę świecącą zawartą w strukturze U12 powodując jej świecenie.
Tranzystor zawarty w U12 zostaje zwarty, co stanowi to informację dla procesora, że akumulator jest przyłączony prawidłowo i można rozpocząć proces ładowania. Inna sytuacja, która może mieć miejsce jest taka, że akumulator może być dołączony odwrotnie.
Wówczas napięcie z bieguna ujemnego jest doprowadzone do złącza CON10, prąd przepływa przez rezystor ograniczający R33, dioda D26 przewodzi. Prąd trafia na stabilizator prądu, a potem na diodę świecącą zawartą w strukturze U11. Tranzystor zawarty w strukturze U11 przewodzi, co jest informacją dla procesora, że akumulator jest dołączony nieprawidłowo. Spowoduje to zaświecenie się odpowiednich kontrolek i zablokuje start procesu ładowania.
Jeśli do ładowarki nie dołączono akumulatora, to nie płynie żaden prąd, co powoduje, że tranzystory zawarte w strukturach U11 i U12 nie przewodzą. Napięcie na korektorach wynosi +5 V, co jest to informacją dla procesora, że nie podłączono żadnego akumulatora i rozpoczęcie procesu ładowania nie jest możliwe. Wtedy również zostają zaświecone odpowiednie kontrolki. W układzie detekcji do stabilizowania prądu diod świecących zastosowałem źródło prądowe, ponieważ napięcie wejściowe może wynosić 5...33 V.
Układ aktywnego chłodzenia wykonano ze wzmacniaczem operacyjnym U15. Jako czujnik temperatury radiatora użyto termistora R45. Potencjometr RN1 służy do ustawiania temperatury załączenia wentylatorów.
Oprogramowanie
Program napisano w języku Bascom AVR. Jego struktura składa się z pętli głównej i procedury obsługi przerwania od Timera 0 (mult_wysw). W obsłudze przerwania są obsługiwane wyświetlacze LED, kontrolki, impulsator. Również jest ustawiana flaga_zezw, której ustawienie zezwala na wykonanie instrukcji w pętli do...loop. W pętli nieskończonej jest sprawdzana flaga_zezw.
Jeśli jest ustawiona, to zostają wykonane wszystkie instrukcje, które znajdują się wewnątrz instrukcji warunkowej. Sprawdzana jest flaga power_on odpowiedzialna za stan pracy urządzenia. Jeśli flaga nie jest ustawiona, urządzenie jest w stanie czuwania.
Flaga ustawiona oznacza urządzenie włączone. W stanie czuwania są ustawione wartości poszczególnych zmiennych, a wypełnienie sygnałów PWM wynosi 0. Jest tu także zapisana obsługa przycisku impulsatora, którego dłuższe trzymanie powoduje wejście w tryb ustawiania czasu, a krótkie naciśnięcie i puszczenie - wejście ładowarki w tryb pracy. Dwukropek w tym trybie miga w takt sygnału z zegara czasu rzeczywistego.
Gdy flaga power_on jest ustawiona, zostają ustawione zmienne bitowe włączenia transformatora głównego oraz zostaje zgaszony dwukropek wyświetlacza. Następnie jest sprawdzany stan przycisku impulsatora. Krótkie wciśnięcie i puszczenie powoduje przejście ładowarki w stan czuwania oraz zapisanie do pamięci nieulotnej procesora ważnych zmiennych bitowych.
Dalej, przy każdym obiegu pętli jest zwiększana zmienna licznik_petli. Teraz program natrafia na instrukcję wyboru, która jest zależna od wcześniej wspomnianej zmiennej. Po 5 obiegach pętli są zerowane odpowiednie zmienne bitowe oraz jest sprawdzany stan detektora prawidłowego przyłączenia akumulatora.
Jeśli akumulator jest dołączony prawidłowo program wykonuje się dalej, aby przy 10 obiegu pętli wysłać dane do cyfrowego czujnika temperatury. Przy 17 i 20 obiegu zostaje przepisana wartość z przetwornika A/C do zmiennej napiecie. Pomiar jest wykonany dwa razy. W 20 obiegu są wykonywane instrukcje odpowiedzialne za prawidłowe odczytanie napięcia ładowanego akumulatora oraz dobór odpowiedniego trybu ładowania.
Zostaje obliczone napięcie akumulatora, aby można było wyświetlić jego poprawną wartość na wyświetlaczu. Przy 95 obiegu zostaje odczytana wartość temperatury otoczenia z czujnika, oraz zostaje przeliczona na współczynniki korekcji dla poszczególnych napięć.
Na czas odczytu przerwania globalne muszą być zablokowane. Współczynniki korekcji zostają zapisane w pamięci nieulotnej procesora. Przy 185 obiegu zostaje sprawdzona flaga odczyt_pamieci. Jest ona ustawiona, gdy proces ładowania nie dobiegł końca, a nastąpiła przerwa w dostawie prądu.
Dzięki tej zmiennej, po przywróceniu zasilania, z pamięci zostaje odczytany ładunek bieżący i jest możliwe dokończenie procesu ładowania. Przy 190 obiegu instrukcja wyboru zatrzymuje się. Cyklicznie zostają przepisane wartości z rejestrów przetwornika A/C oraz zostaje obliczony i wyświetlony prąd ładowania akumulatora, a program wchodzi w drugą instrukcje wyboru licznik_erom.
Licznik ten przy wartości 180 zapisuje wszystkie ustawienia ładowarki do pamięci nieulotnej - ma to miejsce przy każdym obrocie pokrętła impulsatora. Gdy licznik ma wartość 190 jest wykonywana cała procedura odpowiedzialna za proces ładowania. Najpierw jest sprawdzany stan zmiennej Q i jeśli wynosi 10 lub mniej, proces ładowania jest zatrzymany.
Gdy ma wartość większą od 10, proces ładowania rozpoczyna się. Najpierw jest zwiększany licznik opoznienie oraz zostaje włączony sterownik przetwornicy. Gdy licznik opoznienie przekroczy 1000, co odpowiada ok. 10-sekundowemu opóźnieniu, zostaje załączony przekaźnik oraz ustawiona flaga zezwalająca na pomiary prądu i napięcia ładowania akumulatora.
Dalej zostają dokonane odpowiednie obliczenia korekcji temperaturowej napięcia ładowania oraz jest obliczany prąd ładowania dopasowany do napięcia znamionowego oraz trybu ładowania akumulatora. W następnej kolejności jest sprawdzane czy akumulator został już naładowany. W tym celu jest dokonywane formatowanie zmiennych Ur i Ir oraz są porównywane zmienne Ur z Urr oraz Ir z Irr.
Prąd ładowania jest monitorowany. Jeśli akumulator zostanie odłączony, to po około 10 sekundach mikrokontroler rozpozna ten fakt, przerwie proces ładowania i zaczyna od początku, czyli od odczytu stanu detektora prawidłowego przyłączenia akumulatora. Sytuacja wygląda podobnie, jeśli ładowarka zostaje przeciążona lub jeśli doszło do zwarcia.
Na koniec jest obliczany ładunek przekazany do akumulatora. Jest on wyznaczany na bazie natężenia prądu ładowania oraz czasu, przez który płynął ten prąd. Wartości prądu ładowania są sumowane przy każdym obiegu pętli i dzielone przez 1800, a potem formatowane do wartości wyświetlanej na wyświetlaczu. Obliczenia te są dokonywane tylko, jeśli akumulator jest ładowany. Na końcu dodano procedurę dbającą o to, aby po 30 minutach od zakończenia procesu ładowania ładowarka samoczynnie weszła w tryb czuwania.
Wykaz elementówPłyta czołowa Rezystory: (0,25 W) Kondensatory: Półprzewodniki: Inne: Płyta główna Rezystory: Kondensatory: Półprzewodniki: Inne: |
Montaż i uruchamianie

Rysunek 3. Schemat montażowy panelu czołowego
Na rysunku 3 pokazano schemat montażowy płyty panelu czołowego. Płytka jest jednostronna, ale powinna mieć metalizowane otwory pod wszystkie złącza, ponieważ w innym wypadku ich wlutowanie jest bardzo trudne, bo są montowane od strony druku. Montaż należy zacząć od wlutowania wszystkich zwór, rezystorów przewlekanych i SMD, kondensatorów, tranzystorów, diod półprzewodnikowych, dławika i rezonatora kwarcowego.
Następnie montujemy układy scalone i wszystkie złącza. Kondensator C14 musi być zamontowany na leżąco. Trymer C12 można wlutować od strony druku, co ułatwi dokładne skalibrowanie częstotliwości zegara czasu rzeczywistego podczas uruchamiania.
Na koniec zostawiamy montaż wyświetlaczy, diod LED i impulsatora. Złącza CON4 i CON5 muszą być ze sobą połączone, ponieważ stanowią połączenia pomiędzy anodami wyświetlaczy prawej i lewej strony płytki. W zasadzie można nie montować tych złączy a połączenie wykonać kawałkiem samej 4 żyłowej taśmy przewodów lutowanej bezpośrednio do płytki.
Na rysunku 4 zamieszczono schemat montażowy płyty głównej ładowarki. Również ta płytka jest jednostronna. Montaż zaczyna się od wlutowania wszystkich zwór - są one wykonane drutem o średnicy 0,5 mm lub 0,8 mm. Te "grubsze" wyróżniono na schemacie montażowym za pomocą pogrubionych linii.

Rysunek 4. Schemat montażowy płyty głównej
Następnie montujemy rezystory SMD detektora prawidłowego dołączenia akumulatora. Są one umieszczone od strony druku. W następnej kolejności montujemy kondensatory - zaczynamy od ceramicznych i blokowych, kończymy na elektrolitycznych.
Kondensatorów C10...C13 na razie nie montujemy. Dalej, należy wlutować elementy półprzewodnikowe zaczynając od elementów SMD detektora (montowane od strony druku), a kończąc na wszystkich układach scalonych. Układy U11 i U12 są montowane od strony druku. W dlaszej kolejności należy wlutować wszystkie złącza, przekaźniki oraz dławiki.
Jako przedostatni montujemy radiator (po uprzednim rozplanowaniu, przewierceniu i nagwintowaniu otworów do przykręcenia tranzystora mocy T2, diod D6...D9, D11...D15 oraz stabilizatorów U14 i U1). Po stronie od panelu czołowego należy odciąć jedno skrzydełko radiatora, zgodnie z fotografią 5.
Radiator musi mieć elektryczne połączenie ze ścieżkami masy płyty głównej. Wszystkie elementy półprzewodnikowe muszą być odizolowane od radiatora za pomocą podkładek izolacyjnych z miki posmarowanych pastą termoprzewodzącą.

Fotografia 5. Sposób odcięcia skrzydełka radiatora
Termistor R45 jest przyklejony do radiatora za pomocą kleju termoprzewodzącego. Podczas montażu radiatora do płytki można powierzchnie styku radiatora z płytką posmarować klejem. Usztywni to dodatkowo płytkę, ponieważ spoczywa na niej spory ciężar radiatora oraz dławików.
Po zamontowaniu i przykręceniu wszystkich elementów do radiatora pora na wlutowanie kondensatorów C10...C13. Po zmontowaniu widać, że kondensatory uniemożliwiają dostęp do śrub mocujących diody do radiatora. Aby w przyszłości ułatwić do nich dostęp można wystawić je ponad powierzchnię płytki, jak pokazano na fotografii 6.
Wcześniej wspomniałem, że na płycie głównej spoczywa spory ciężar, toteż podczas wstrząsów może dojść do jej pęknięcia. Aby skutecznie temu zapobiec do spodniej strony płytki zostały przyklejone stopki, jak na fotografii 7.

Fotografia 6. Sposób zamocowania diod dla ułatwienia dostępu
Ostatnią rzeczą, którą trzeba zrobić kończąc montaż płyty głównej jest wykonanie masy prądowej. Połączenie masy jest wykonane przewodem o przekroju 2,5 mm² ( rysunek 8). Prąd ładowania może osiągnąć wartość nawet 20 A i dlatego należy pogrubić ścieżki prądowe (rysunek 9).
Po zmontowaniu obu można przystąpić do montażu całej ładowarki. Płytki umieszczono w metalowej obudowie, która jest dostępna w AVT pod oznaczeniem T-303. Obudowa ta jest wyposażona w gniazdo bezpiecznika, które w prototypie posłużyło do zabezpieczenia uzwojenia pierwotnego transformatora (bezpiecznik zwłoczny 2...2,5 A).
Podczas montażu płytek w obudowie należy pamiętać, że masa płytek nie może mieć połączenia elektrycznego z obudową. Do zamocowania płytek można użyć np. tulejek dystansowych z tworzywa sztucznego. Obudowa nie jest zbyt sztywna i dlatego usztywniłem ją za pomocą dodatkowego, stalowego płaskownika. Również śruba mocująca transformator sieciowy do spodu obudowy została przykręcona do płaskownika.
Fotografia 7. Montaż stopek podpierających płytkę
Radiator jest przymocowany do płaskownika za pośrednictwem kątownika aluminiowego. Takie rozwiązanie usztywni obudowę oraz skutecznie zabezpieczy płytki przed uszkodzeniem, gdyby coś ciężkiego spadło na obudowę. Należy przy tym pamiętać, aby radiator oraz pręt mocujący transformatora były odizolowane elektrycznie od płaskownika (fotografia 10).
Płytkę panelu czołowego przymocowano za pomocą śrub z tworzywa sztucznego. Z tyłu obudowy są zamontowane dwa wentylatory dbające o zabezpieczenie półprzewodników mocy przed przegrzaniem. W praktyce, gdy prąd ładowania nie przekracza 6 A wentylatory nie są potrzebne. Jednak ładowarka podczas pracy na słońcu może ulec przegrzaniu z braku odpowiedniego chłodzenia. Kable służące do połączenia ładowarki z akumulatorem powinny mieć minimalny przekrój rzędu 4 mm².
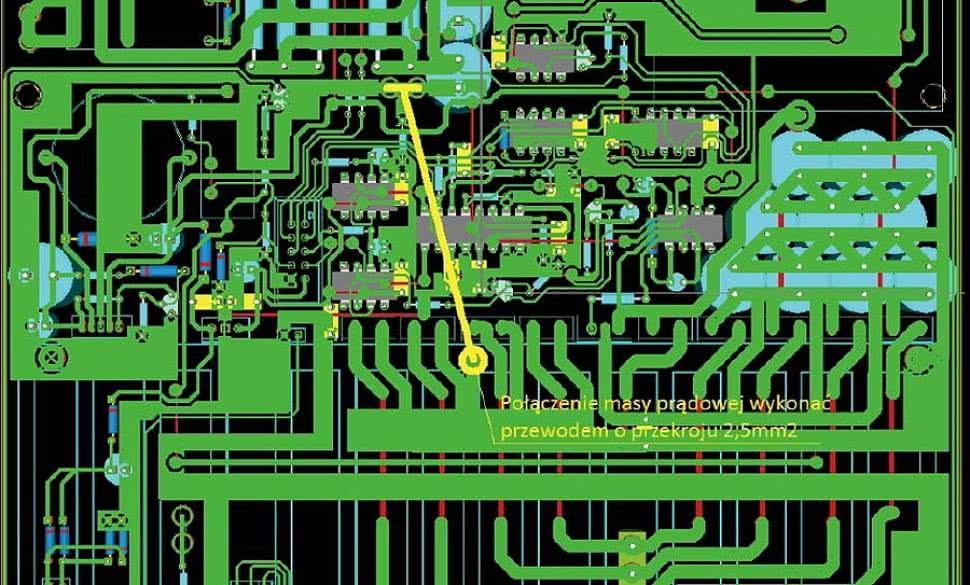
Rysunek 8. Połączenie masy prądowej wykonywane od spodu płyty głównej
Przed pierwszym uruchomieniem nie zamykamy góry obudowy. Po zmontowaniu oraz sprawdzeniu poprawności montażu można przejść do uruchamiania ładowarki. Po załączeniu na wyświetlaczu pojemności powinna być wyświetlona aktualna godzina.
Aby ustawić czas należy przytrzymać wciśniętą ośkę impulsatora przez ok.5 sekund, aż dwukropek przestanie migać i zacznie świecić światłem ciągłym. W tym momencie jest możliwe ustawienia aktualnego czasu poprzez kręcenie pokrętła impulsatora. Po ustawieniu czasu dwukropek zacznie migać. Ustawienie godziny nie jest potrzebne do poprawnej pracy.

Rysunek 9. Ścieżki prądowe zaznaczone na pomarańczowo należy pogrubić
Teraz dołączamy akumulator, który chcemy ładować i włączamy ładowarkę poprzez przytrzymanie pokrętła impulsatora przez około 2 sekundy i zwolnienie go. Ładowarka sama rozpozna napięcie znamionowe akumulatora oraz dobierze odpowiedni tryb ładowania.
Użytkownik jedynie musi ustawić pojemność ładowanego akumulatora poprzez kręcenie ośką impulsatora. Po ustawieniu pojemności proces ładowania rozpocznie się automatycznie. Gdy akumulator naładuje się, ładowarka zacznie ładować go napięciem podtrzymania, a po 30 minutach takiego ładowania, ładowarka samoczynnie wyłączy się.
Akumulator może pozostać dołączony do ładowarki bez obawy, że zostanie rozładowany. Podczas pierwszego uruchamiania trzeba ustawić temperaturę przy jakiej maja włączyć się wentylatory systemu chłodzenia.
Aby to wykonać, należy rozgrzać radiator do temperatury około 50°C, co wiąże się z obciążeniem ładowarki prądem o natężeniu 8 A w temperaturze otoczenia 20°C.

Fotografia 10. Na pomarańczowo oznaczono miejsca, w których śruby należy odizolować od obudowy
Gdy radiator się rozgrzeje, to można ustawić moment załączenia się wentylatorów za pomocą potencjometru RN1 znajdującego się na płycie głównej. Teraz ładowarka jest prawidłowo uruchomiona i można zamknąć obudowę.
Podczas użytkowania ładowarki trzeba pamiętać, że po jej dołączeniu do ładowanego akumulatora pobiera z niego prąd ok. 20 mA, co po dłuższym czasie może doprowadzić do rozładowania akumulatora o małej pojemności. Mocno rozładowane akumulatory nie zostaną prawidłowo rozpoznane przez ładowarkę. Minimalne napięcie akumulatora, zależnie od typu, to:
- 6 V to ok. 5,5 V.
- 12 V to ok. 11 V.
- 24 V to ok. 22 V.
Przedstawiona w artykule ładowarka została testowana przeze mnie z prądem maksymalnie 10 A przy napięciu 12 V. Nie testowałem jej przy maksymalnym obciążeniu 20 A.
Rafał Wasiak
fabian_wasiak@interia.pl