Zaloguj
Zaloguj



Firma Intel FPGA przygotowała w ostatnich tygodniach aktualizację środowiska programistycznego Quartus do wersji 17.1. Aby zbytnio nie zanudzać Was analizą zmian, powiem w „telegraficznym skrócie” o najważniejszych z nich:
- Zmieniono nazwę narzędzia Qsys, na Platform Designer. Taka mała, kosmetyczna zmiana, ale mogąca wprowadzić nieco zamieszania, jeśli chcielibyśmy znaleźć interesującą nas pozycję.
- Zaktualizowano środowisko programistyczne Eclipse dołączone do pakietu do nowszej wersji (Mars).
- Naprawiono kilka błędów.
Myślę, że to też dobre miejsce na pewną uwagę – po aktualizacji nowe Eclipse będzie chciało utworzyć nowe środowisko pracy (workspace). Nic nie stoi jednak na przeszkodzie, aby wskazać to, którego używaliśmy poprzednio – program poprosi nas o zgodę na aktualizację „bazy danych”, wraz z ostrzeżeniem, że może nie być możliwości powrotu do korzystania ze starszej wersji.
W zasadzie z większości funkcji korzystamy dokładnie tak jak w poprzedniej wersji – więc do dzieła!
Sprawdzamy zadanie domowe
Na początek, wzorem poprzednich spotkań, rzućmy okiem na zadania domowe. Pierwsze z nich wymagało napisania zaledwie 2 linijek w funkcji main zaraz przed uruchomieniem timera (pamiętajmy o tym, że zmiana zawartości rejestru PERIOD powoduje zatrzymanie timera):
IOWR_ALTERA_AVALON_TIMER_PERIODH(TIMER0_BASE, (50000000UL-1UL)>>16);
IOWR_ALTERA_AVALON_TIMER_PERIODL(TIMER0_BASE, (50000000UL-1UL));
Zapisujemy za ich pomocą rejestr odpowiadający za okres, z którym jest generowane przerwanie. Od pożądanej wartości odejmujemy 1, ponieważ timer zlicza od 0, zaś dopisek UL powoduje, że kompilator będzie traktował liczbę jako typ unsigned long, dzięki czemu na pewno nie nastąpi jej „przycięcie” do mniejszej liczby bitów. Ponieważ zapis prowadzimy po 16 bitów (a timer nasz jest 32-bitowy) operacja podzielona jest na zapis starszej i młodszej części bitów, stąd też wynika przesunięcie bitowe przy zapisie rejestru PERIODH. Po dodaniu tych instrukcji domyślny (ustawiony w Platform Designer <dawny Qsys>) okres timera zostanie zastąpiony wartością 49 999 999, zatem przerwanie zostanie wywołane co 50 000 000 cykli zegara, czyli co… 1 sekundę. Idealna prędkość dla pokazania jak działa multipleksowanie!
Kolejne zadanie wymagało od nas odmierzania czasu. Myślę, kod z listingu 1 nie wymaga żadnych dodatkowych komentarzy.
Ostatnie zadanie dotyczące wyświetlania liczb w różne sposoby także nie powinno stanowić większego problemu, a przykładowe rozwiązania znajdziecie wśród plików towarzyszących tej części kursu.
Ostatnio zajmowaliśmy się przerwaniami generowanymi przez timer, czyli układ całkowicie wewnątrz naszego procesora. Często jednak zachodzi potrzeba, aby wygenerować przerwanie w wypadku jakiegoś zdarzenia zewnętrznego, wymagającego pilnej obsługi, np. pochodzącego z zegara czasu rzeczywistego (takiego jak PCF8583 czy DS1307), czy w wypadku konieczności precyzyjnego pomiaru czasu wystąpienia jakiegoś zdarzenia (budując przykładowo licznik rowerowy chcielibyśmy, aby bardzo precyzyjnie mierzyć okres obrotu koła, podobnie taka funkcjonalność przydaje się np. w wypadku dekodowania sygnału z kodowaniem Manchester).
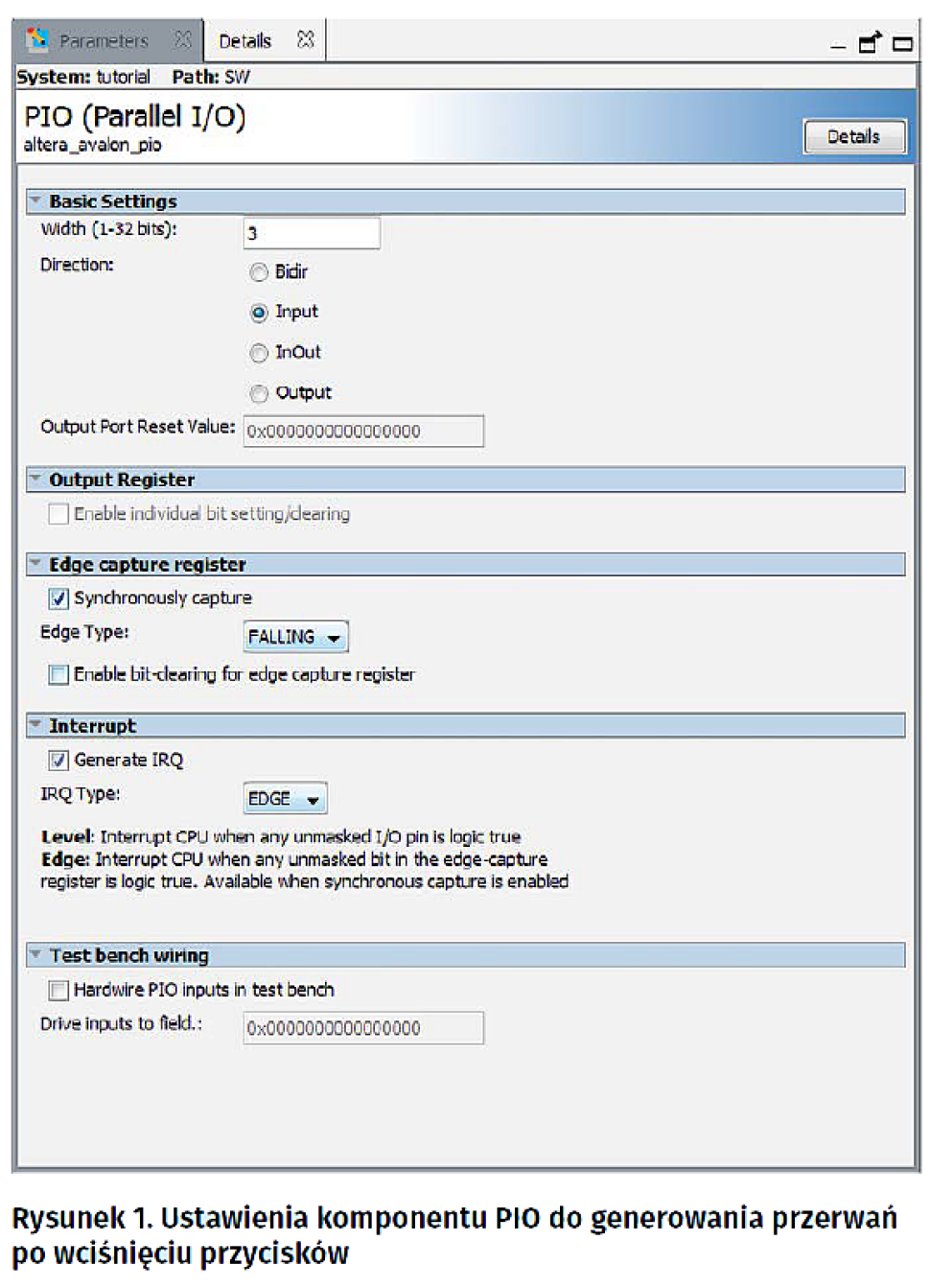
W czasie naszego spotkania dotyczącego linii GPIO wspominałem o tym, jak można ustawić różne tryby generowania przerwań przez porty wejściowe. Czas, abyśmy przypomnieli sobie gdzie należy poklikać, aby wszystko „migało prawidłowo”.
Na początek trochę grzebania w sprzęcie
Otwieramy nasz (możecie wykorzystać swój, do czego gorąco zachęcam, ja jednak będę operował nazwami, które zastosowałem w swoim dziele sztuki ;) ) projekt w Platform Designer, a następnie otwieramy właściwości (Parameters) komponentu PIO, który kiedyś zdefiniowaliśmy do obsługi przycisków (u mnie nosi on nazwę SW).
Na początek zaznaczamy opcje Synchronously capture, a następnie wybieramy FALLING. Dzięki temu dodana zostanie funkcja wykrywania zboczy opadających. Potem zaznaczamy Generate IRQ, i wybieramy EDGE. Dzięki temu system przerwań będzie aktywowany po wykryciu zbocza (które wcześniej określiliśmy jako opadające).
Po tej operacji pojawi się dodatkowy port – irq. Musimy podłączyć go do odpowiadającego portu w naszym rdzeniu, dokładnie tak samo jak w wypadku timera. Dla porządku możemy wybrać System Assign Interrupt Numbers, choć zaraz po podłączeniu portu systemu przerwań powinien automatycznie zostać nadany niekolidujący z niczym numer.
A potem programujemy!
Bazując na naszym poprzednim programie (i przywracając go do stanu bez wykonanych zadań domowych związanych z odmierzaniem czasu oraz spowalnianiem multipleksowania), rozpocznijmy pracę od napisania funkcji, która będzie obsługiwała nasze przerwanie generowane poprzez wciśnięcie przycisku.
Omówienia wymaga tu chyba tylko linijka zapisująca do rejestru komponentu PIO wartość 0. Powoduje ona wykasowanie wszystkich bitów w rejestrze wykrywania zboczy (w rejestrze takim pojawia się 1 na pozycji odpowiadającej pinowi, na którym wyryto zbocze). Jako, że niezerowa wartość tego rejestru powoduje przerwanie, wykasowanie go zapewni „potwierdzenie” obsłużenia przerwania (podobnie jak w wypadku timera, pamiętacie?). Co więcej, jeśli chcielibyśmy wiedzieć który pin wywołał to konkretne przerwanie, moglibyśmy odpowiednią instrukcją odczytać wartość tego rejestru.
Następnie dopisujemy w funkcji main, po inicjalizacji timera, następujące linijki kodu:
alt_ic_isr_register(SW_IRQ_INTERRUPT_CONTROLLER_ID, SW_IRQ, SWInterrupt, NULL, NULL);
IOWR_ALTERA_AVALON_PIO_IRQ_MASK(SW_BASE, 0b111);
intDisplayDec(0);
Do pierwszej z nich komentarz jest chyba w 200% zbędny, bo o tym już się uczyliśmy. Druga linijka ustawia rejestr „maskujący”, który pozwala na filtrowanie które piny powodować będą przerwanie – przecież nie zawsze chcemy aby zbocze opadające na jakimkolwiek pinie danego portu generowało przerwanie – czasem wystarczy tylko jeden pin. Tu ustawiamy wszystkie bity na 1, aby generować przerwania za pomocą dowolnego z przycisków – potem możecie poeksperymentować i sprawić aby tylko wybrane z nich generowały przerwanie.
Po skompilowaniu i wgraniu programu licznik będzie zliczał ilość przerwań, czyli… ilość kliknięć przyciskami. (Kody programów, na poszczególnych etapach naszego spotkania znajdują się w głównym folderze projektu i noszą nazwy main_XX_(…).c – jeśli potrzebujecie przywołać dany kod wystarczy zawartość wybranego pliku skopiować do pliku main.c w folderze ProjektqsyssoftwareTutorial04 i skompilować program).
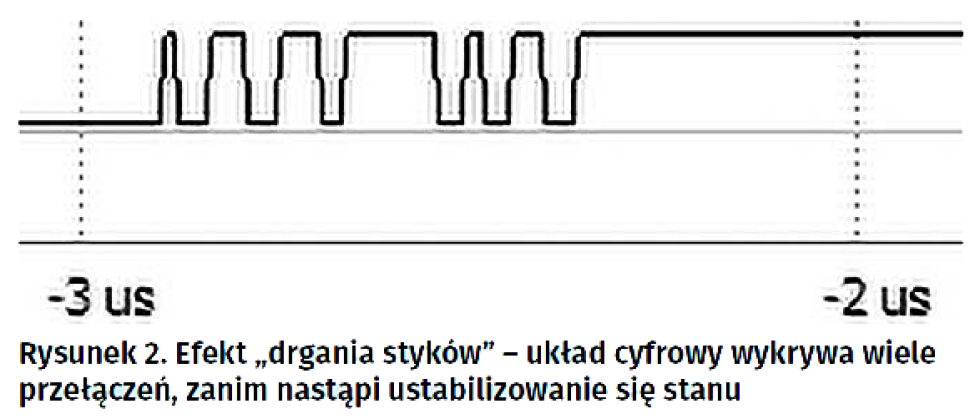
Czas na testy, które mam nadzieję, zakończą się połowicznym sukcesem. Dlaczego połowicznym? Gdyż prawdopodobnie niektóre przyciski, przynajmniej raz na jakiś czas będą generowały zliczenia w dziwny sposób – np. zliczone zostanie puszczenie przycisku (mimo iż to zbocze narastające!), lub jedno wciśnięcie przycisku zostanie zliczone jako kilka. Co zrobiliśmy źle?

Drgania styków – jak sobie z nimi poradzić
Skoro ustaliliśmy już, że przerwanie generowane przez przycisk nie jest dobrym sposobem na jego obsługę, wypada zadać sobie pytanie – jak to robić?
Najlepiej wykorzystać do tego celu… przerwanie naszego timera! Jeśli w każdym przerwaniu sprawdzać będziemy stan przycisku (a więc u nas co 1 ms), a następnie założymy, że np. brak zmian stanu danego wejścia układu przez 50 ms (50 kolejnych przerwań) oznacza brak drgań styków, to wtedy możemy zliczyć dane kliknięcie. Jak to zaimplementować? Deklarację zmiennej counter przenosimy przed definicję funkcji przerwania, którą następnie modyfikujemy w sposób przedstawiony na listingu 3. Na początek może to wyglądać nieco skomplikowanie, ale powolutku przeanalizujmy ten kod.
Zaczynamy od odczytania stanu przycisków i sprawdzamy, czy którykolwiek z nich jest wciśnięty (czy którekolwiek wejście ma stan inny niż 1). Jeśli nie to resetujemy licznik milisekund (bo, albo nie jest wciśnięty żaden przycisk, albo odczytaliśmy stan wysoki z powodu „drgań styków”). W przeciwnym wypadku, jeśli jeszcze nie odmierzono 50 ms, licznik zwiększamy.
W momencie przekroczenia przez licznik wartości 49 (warunek < 50), przechodzimy do sprawdzenia, czy jego wartość wynosi dokładnie 50, jeśli tak, wykonujemy zadanie (u nas zwiększenie wartości licznika i wyświetlenie jej na wyświetlaczu) i zwiększamy kolejny raz licznik milisekund (do wartości 51). Ostatnie porównanie i zwiększenie licznika służy temu, aby zadanie wykonać tylko raz (dopiero zwolnienie przycisku spowoduje ustawienie licznika milisekund na zero).
Proste rozwiązanie a cieszy oko! Już nie ma zwiększania licznika przy puszczaniu przycisku, ani liczenia jednego kliknięcia za kilka. Sukces! I to z wykorzystaniem dalej jedynego timera w naszym systemie!
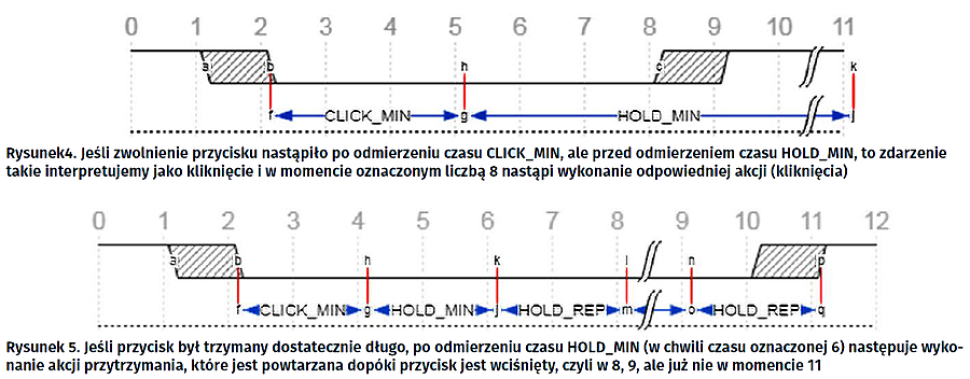
Jakie rozwiązanie byłoby „fajniejsze” od tego, które właśnie opracowaliśmy? Na przykład takie, które umożliwia wykrywanie przytrzymania przycisku, powtarzanie jakiejś akcji przy trzymaniu przycisku i proste definiowanie oraz zmienianie działań podejmowanych w każdym z tych wypadków. Wykresy pokazana na rysunkach 4 i 5 obrazują różne przypadki działania takiego koncepcyjnego systemu. Poszedłem jeszcze nieco dalej i dodałem opcję przekazywania do funkcji parametrów (podobnie jak umożliwia to nam biblioteka do obsługi przerwań w ekosystemie NIOS II). W kodzie przemyciłem także parę ciekawych konstrukcji programistycznych dostępnych w języku C:
- Wskaźniki na funkcje.
- Struktury.
- Definiowanie typów.
- Typy wyliczeniowe.
- Skończone maszyny stanów.
Wszystkie te rozwiązania umieszczone zostały w plikach KBD.c oraz KBD.h, ale o tym będzie już Wasze zadanie.
Podsumowanie i zadania
W czasie naszego spotkania udało nam się zapoznać obsługą przerwań zewnętrznych oraz z efektem „drgań styków”. Potem jednak szybko poradziliśmy sobie z tym problemem poradziliśmy wykorzystując do tego timer. Ważną nauczką z naszych ostatnich zmagań powinien być też fakt możliwości wykorzystania jednego timera do wielu zadań – często w projektach zachodzi konieczność odmierzania różnych czasów, obsługi wielu przycisków, generowania opóźnień pomiędzy różnymi zadaniami – w znakomitej większości takich przypadków nie potrzeba nam więcej niż jednego licznika!
Jakie jednak będzie zadanie tym razem? Jako iż nie jest to kurs poświęcony językowi C, który to służy nam jedynie za narzędzie w „fpg-owym” warsztacie, ale z drugiej strony im lepiej dialekt ten znamy, tym łatwiej sobie poradzimy w różnych sytuacjach. Tym razem zachęcam w ramach pracy domowej do dokładnej analizy wspomnianego „zaawansowanego” kodu obsługi przycisków (czy klawiatury), oraz zapoznania się z pięcioma zagadnieniami wypunktowanymi kilka linijek wcześniej.
Ponadto, macie już pewną wiedzę, która może zostać wykorzystana do stworzenia własnych projektów, czemu by np. nie wykonać minutnika, licznika rowerowego, czy innego ciekawego projektu?
Pozostaje mi życzyć tylko powodzenia w zgłębianiu wiedzy na temat języka i zaprosić na kolejne spotkanie, w którym zajmiemy się obsługą transmisji szeregowej (UART). Dlatego warto wyposażyć się w przejściówkę USB UART, lub inne urządzenie pozwalające na komunikację po tym interfejsie, najlepiej w standardzie napięciowym 3,3 V (choć ze standardem 5 V także sobie poradzimy).
Małe post scriptum, czyli drobne uzupełnienie
Jest jeszcze kilka drobnych, acz ważnych spraw związanych z timerami i przerwaniami, o których muszę wspomnieć.
W naszym obecnym projekcie czas mierzymy z dokładnością do 1 ms. Jeśli potrzeba by było większej dokładności to… no właśnie, co zrobić? Pierwsza (niezbyt dobra) opcja to zwiększenie częstotliwości występowania przerwań. Ale uwaga! Jeśli przesadzimy z tym parametrem, to procesor może nie zdążyć z wykonaniem wszystkich instrukcji przerwania, zanim zgłoszone zostanie następne, lub pomiędzy zakończeniem obsługi jednego przerwania a zgłoszeniem kolejnego będzie bardzo mało czasu. Wtedy procesor będzie non-stop spędzał czas w przerwaniu, nie obsługując nawet innych przerwań, ani nie wracając do pętli głównej (u nas na razie jest pusta, ale wkrótce to się zmieni).
Druga opcja to z jednej strony liczyć tak jak obecnie milisekundy, ale w celu dokładniejszego pomiaru czasu odczytywać wartość licznika momencie jakiegoś zdarzenia. W tym jednak miejscu, przynajmniej w mojej głowie, zapala się pomarańczowa lampka dotycząca dostępu atomowego do tych danych. Kluczowa część programu mogłaby wyglądać tak:
IOWR_ALTERA_AVALON_TIMER_SNAPH(TIMER0_BASE, 0);
uint16_t copyMs = counterMs;
Pierwsze (zgodnie z tym, czego dowiedzieliśmy się już wcześniej) instrukcja powodująca skopiowanie aktualnego stanu licznika do rejestrów SNAPH/L, a potem odczyt licznika milisekund, zwiększanego w przerwaniu timera. Co jednak, jeśli między tymi instrukcjami wystąpi przerwanie? Musimy temu zapobiec – najlepiej wyłączając na krótką chwilę przerwania.
Jak wyłączyć przerwania, czyli o dostępie atomowym raz jeszcze
Aby w naszym systemie wyłączyć, a potem włączyć przerwania musimy wykonać następujące zadania:
alt_irq_context context = alt_irq_disable_all();
alt_irq_enable_all(context);
Po co jednak ta zmienna context? Przechowuje ona informację o tym, czy przerwania nie były już wyłączone w momencie wywołania instrukcji ich wyłączenia. Przeanalizujmy potencjalną sytuację, w której korzystamy z biblioteki tworzonej przez inną osobę, która też korzysta z wyłączania i włączania przerwań, np. wg takiego schematu:
- Wyłączenie przerwań.
- Wywołanie funkcji bibliotecznej:
* wyłączenie przerwań,
* instrukcje z biblioteki,
* włączenie przerwań.
- Nasze instrukcje.
- Włączenie przerwań.
Jeśli w tej sytuacji funkcja biblioteczna wykonywałaby bezwzględne włączenie przerwań, nasze instrukcje wykonywałyby się przy włączonych przerwaniach. Natomiast, jeśli skorzystamy z niejako narzuconej przez producenta formy realizacji tego zadania, będziemy w 100% bezpieczni. Ostatecznie nasz program może wyglądać tak, jako pokazano na listingu 4.
Wszystko super (rzecz jasna nie mamy eliminacji drgań styków, ale nie o to nam chodzi), mam nadzieję, że każdy wie, iż zapis 999-timerValue/50 wynika z faktu, że licznik zlicza w dół, oraz że aby otrzymać mikrosekundy musimy podzielić jego wartość przez 50 (ponieważ zegar ma częstotliwość 50 MHz). Uważniejsi obserwatorzy jednak zaraz postawią mi zarzut – przecież timer cały czas działa, po wyłączeniu przerwań mógł się on przepełnić i wtedy po pierwsze zgubimy jedną milisekundę, a po drugie wartość odczytana z rejestru SNAP będzie przekłamana.
Pierwszy zarzut na szczęście nie sprawdzi się – nawet, jeśli nastąpi zgłoszenie przerwania (które nie zostanie obsłużone z powodu wyłączenia przerwań), to zostanie ono „zapamiętane” i zaraz po włączeniu przerwań nastąpi jego obsługa (pomijam niedopuszczalny fakt, gdyby przerwania były wyłączone na zbyt długi okres czasu i zgłoszone zostałyby 2 lub więcej przerwań.).
Drugi zarzut jest jednak w 100% słuszny, pomimo iż prawdopodobieństwo takiej sytuacji nie jest wielkie. Można by temu zaradzić zatrzymując timer na czas odczytu (jednak wtedy ze 100% pewnością wprowadzać będziemy błąd w naszym pomiarze czasu), albo sprawdzając, czy w momencie zatrzymania przerwań nie doszło do wyzerowania się licznika. Jeśli tak to cały odczyt może być obarczony błędem nawet 1 ms (w przeciwnym wypadku błąd to co najwyżej czas wykonania instrukcji, od momentu wykrycia stanu niskiego na pinie, do momentu zatrzaśnięcia wartości rejestrów SNAPH/L). Aby dodać takie sprawdzenie wystarczy w miejscu oznaczonym gwiazdką w komentarzu dodać poniższą instrukcję odczytu rejestru statusu, oraz zmodyfikować funkcję wyświetlającą czas w konsoli Eclipse (korzystamy z JATG UART).
uint8_t valid = !(IORD_ALTERA_AVALON_TIMER_STATUS(TIMER0_BASE) & ALTERA_AVALON_TIMER_STATUS_TO_MSK);
// ...
printf("T = %u.%03lu ms %c rn", copyMs, 999-timerValue/50, valid?’ ‚:’*’);
Oczywiście podejście zależy od tego, jaki czas chcemy mierzyć. Czasem zasadne może być użycie osobnego timera do takich celów i uruchamianie go a potem zatrzymywanie, w celu odmierzenia czasu między jakimiś zdarzeniami – wszystko zależy od konkretnego problemu, jaki chcemy rozwiązać, a także od tego, jakiej dokładności oczekujemy.
Piotr Rzeszut, AGH