Zaloguj
Zaloguj




Schemat ideowy sterownika serwomechanizmów z interfejsem DMX pokazano na rysunku 1. Napięcie sieciowe jest obniżane w transformatorze, następnie prostowane za pomocą mostka prostowniczego. Na potrzeby zasilania układów scalonych zastosowano stabilizator U1 dający na wyjściu napięcie +5 V.
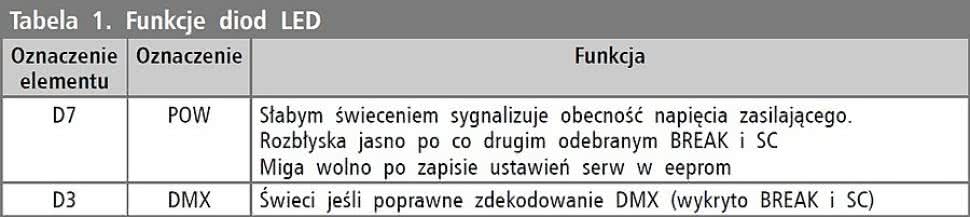
Tabela 1. Funkcje diod LED |
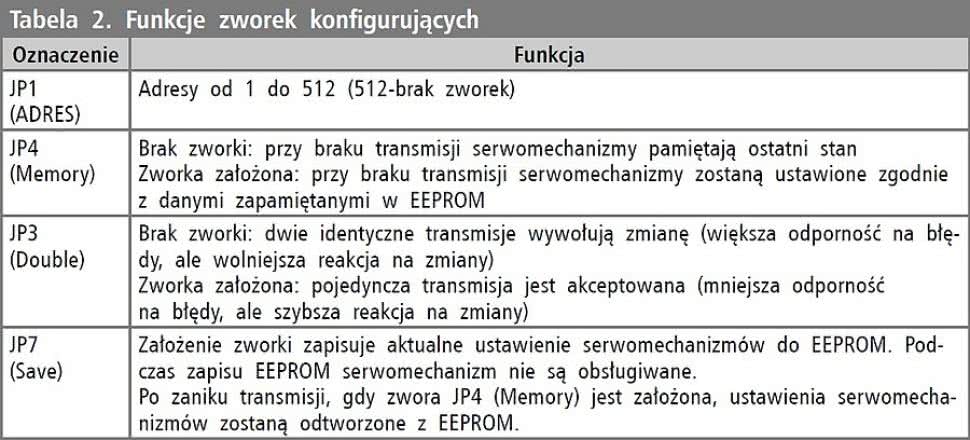
Tabela 2. Funkcje zworek konfigurujących |
Może on również zasilać serwomechanizmy (założona zwora JP5), ale trzeba mieć świadomość, że zależnie od typu i obciążenia, serwomechanizmy mogą pobierać prąd większy niż 1 A. W takiej sytuacji należy podać odpowiednie napięcie zasilające, na przykład z zakresu 4...6 V, o odpowiedniej wydajności prądowej do złącza J8 oraz zdjąć zworę JP5. Dane DMX są konwertowane do poziomów TTL za pomocą układu U4. Zwora JP6 umożliwia załączenie terminatorów linii.
JP1 ustala adres DMX. Należy pamiętać, że sterownik zajmuje cztery kolejne adresy. U3 dekoduje dane DMX i generuje impulsy dla serwomechanizmów. Impulsy są generowane w przerwaniach Timera 1. Najistotniejszy fragment procedury inicjalizującej pokazano na listingu 1. Na listingu 2 zamieszczono procedurę generującą impulsy dla serwomechanizmów i przerwę synchronizującą.
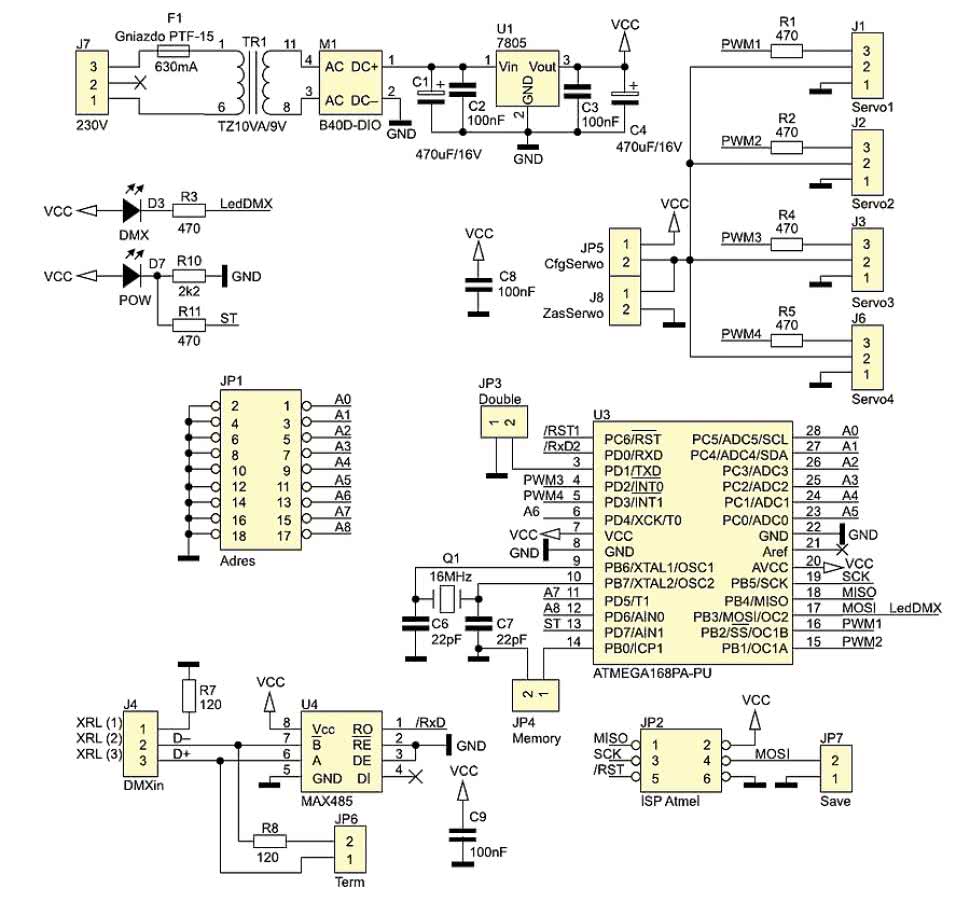
Rysunek 1. Schemat ideowy sterownika serwomechanizmów z interfejsem DMX |
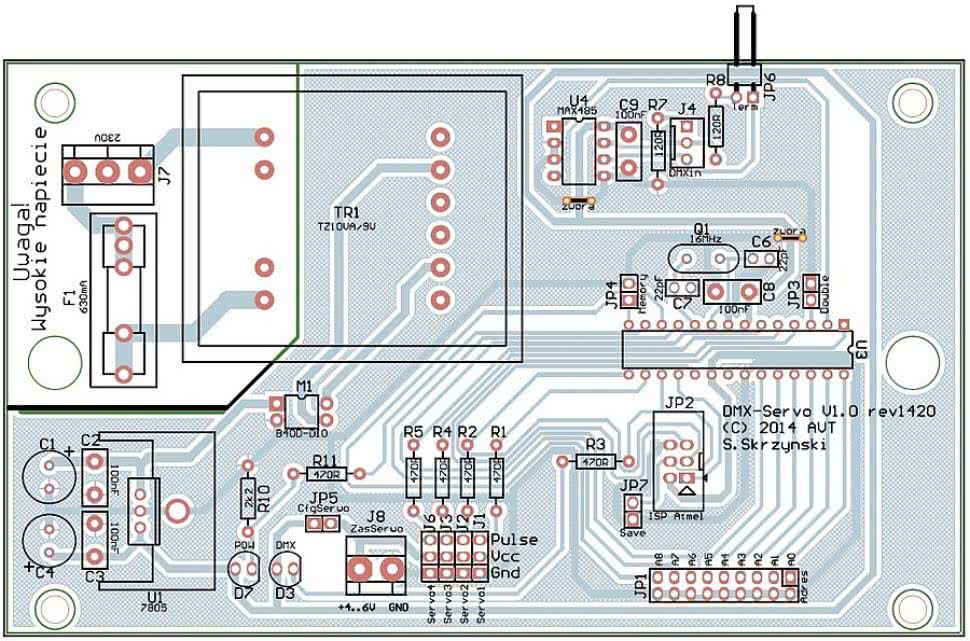
Rysunek 2. Schemat montażowy sterownika serwomechanizmów z interfejsem DMX |
W programie, za pomocą Timera 0 zrealizowano liczenie przekroczenie czasu (timeout) braku transmisji. Jeśli komendy nie docierają przez ponad 1 sekundę, serwomechanizmy są ustawiane w ostatniej pozycji lub przyjmą pozycję domyślną, zachowaną w pamięci EEPROM.
Wykaz elementówRezystory: Kondensatory: Półprzewodniki: Inne: |
Montaż i uruchomienie
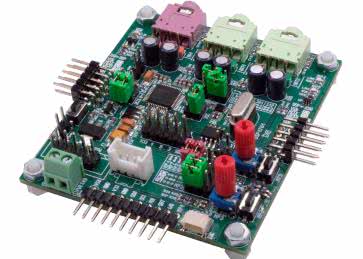
Montaż elementów jest typowy i nie wymaga szczegółowego omawiania. Schemat montażowy sterownika z serwomechanizmów z interfejsem DMX pokazano na rysunku 2. Płytka jest 1-warstwowa, co spowodowało konieczność zastosowania dwóch zworek. Pod mikrokontroler warto zastosować podstawkę.
|
Listing 1. Najbardziej istotny fragment procedury inicjującej mikrokontroler |
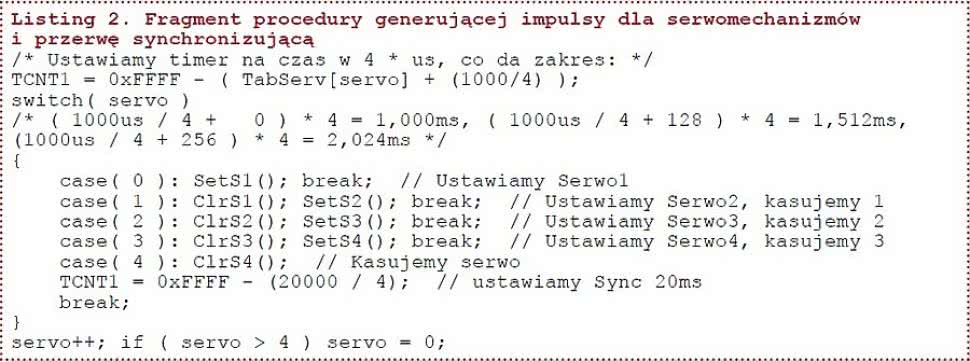
Listing 2. Fragment procedury generującej impulsy dla serwomechanizmów i przerwę synchronizującą |
Uruchomienie rozpoczynamy od sprawdzenia napięcia zasilającego mikrokontroler. Gdy napięcie zasilające jest poprawne, umieszczamy mikrokontroler w podstawce. Jeśli nie jest on zaprogramowany, możemy to zrobić za pomocą złącza JP2.
Ustawienie bitów konfiguracyjnych zaprezentowano na rysunku 3. W kolejnym kroku podłączamy urządzenie do sygnału DMX. Może to być konsola DMX lub np. moduł AVTDMX512 (http://goo.gl/szSKZR) z odpowiednim oprogramowaniem sterującym. Zworkami na urządzeniu ustawiamy adres zgodnie z rysunkiem 4.
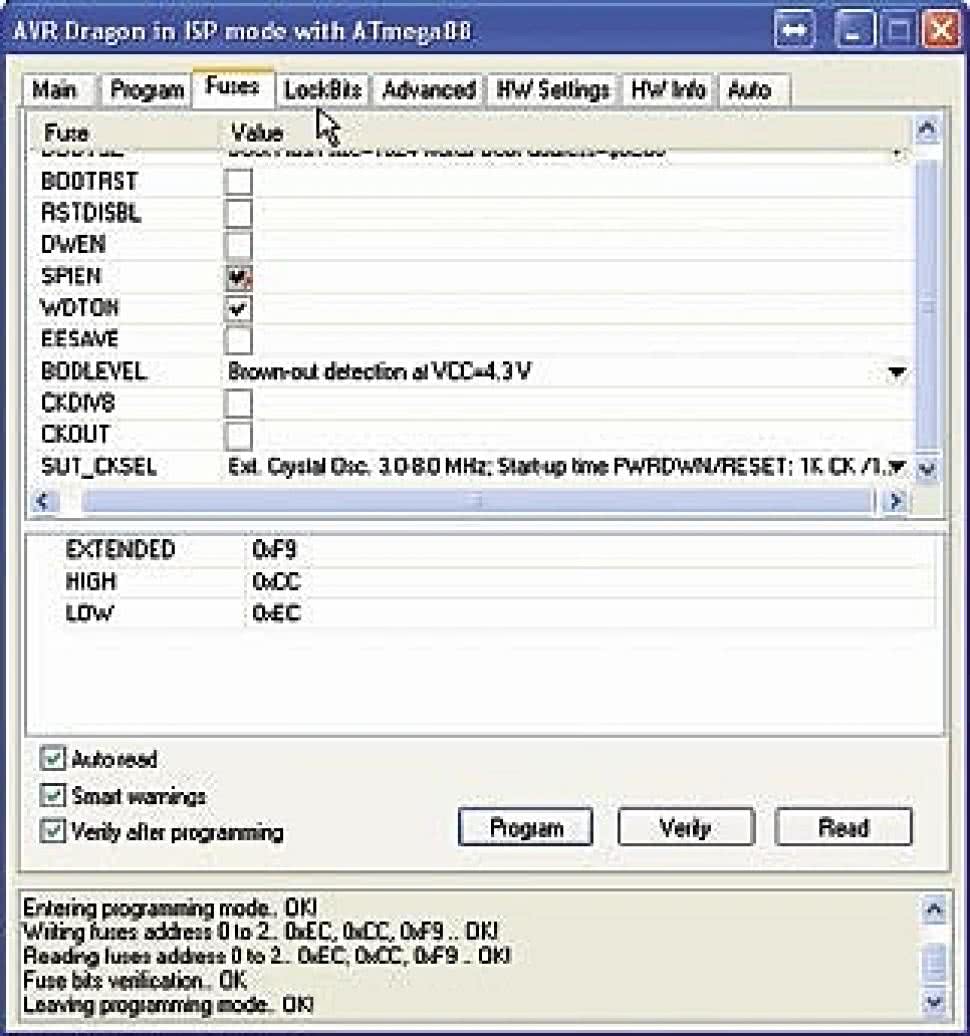
Rysunek 3. Ustawienie bitów konfi guracyjnych |
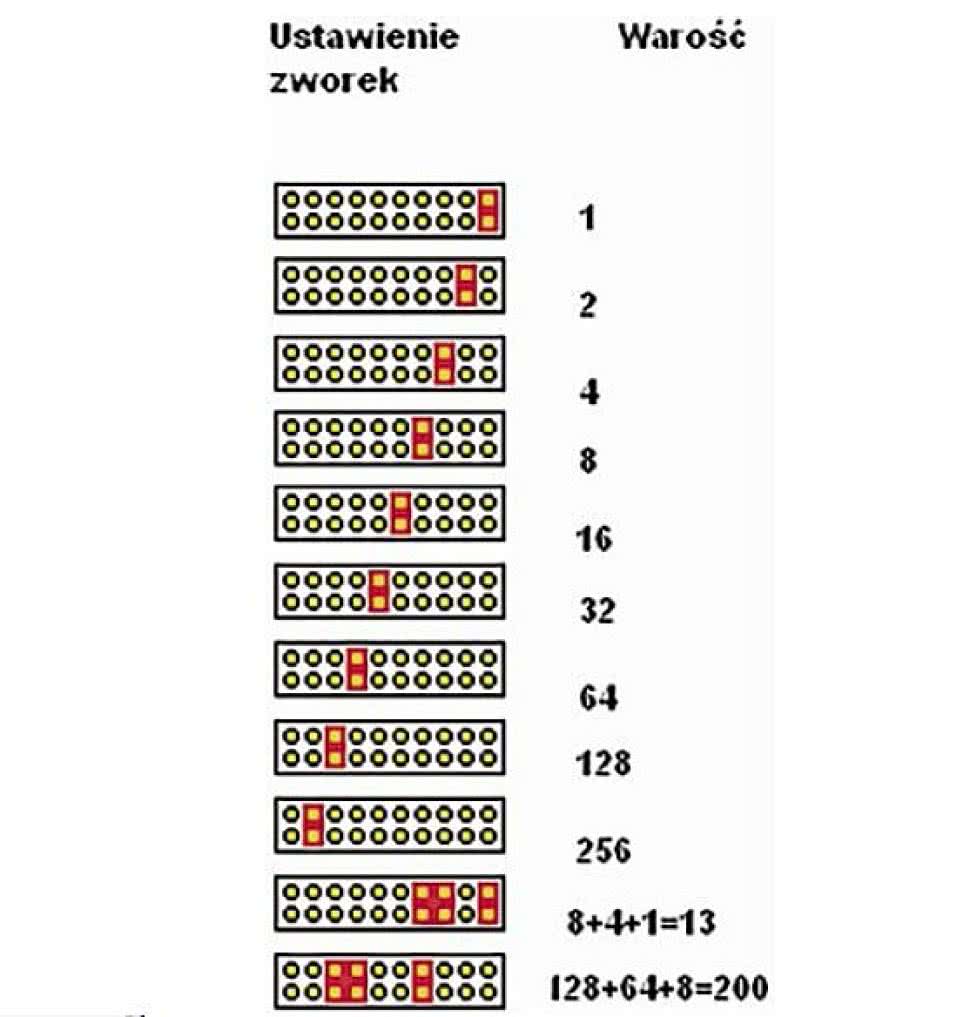
Rysunek 4. Ustawienie adresu sterownika |
Regulując manipulatorami na konsoli lub w programie na komputerze powodujemy ruchy serwomechanizmu. Pierwszy adres steruje serwomechanizmem numer 1, kolejny numer 2 itd. W czasie pracy status sterownika jest sygnalizowany za pomocą diod LED - sposób sygnalizacji opisano w tabeli 1. Funkcje sterownika konfigurowane ze pomocą zworek opisano w tabeli 2.
Płytkę przystosowano do umieszczenia w obudowie KM-50.
Sławomir Skrzyński, EP