Zaloguj
Zaloguj



Jeszcze do niedawna producenci pojazdów traktowali po macoszemu polski rynek motoryzacyjny nie rozpieszczając potencjalnych nabywców bogatym wyposażeniem standardowym aut, a w zamian za to rozbudowując czasami niemal do granic absurdu listę wyposażenia opcjonalnego, za które należało oczywiście dopłacić.
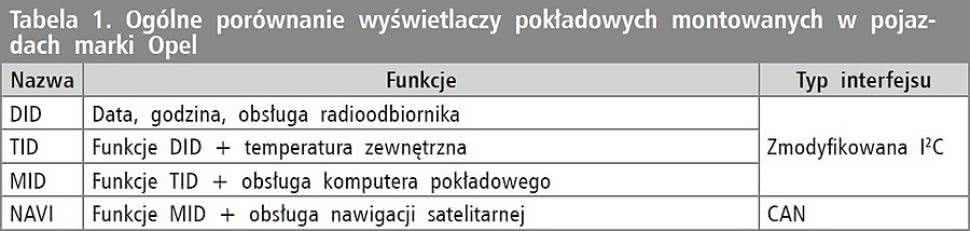
Tabela 1. Ogólne porównanie wyświetlaczy pokładowych montowanych w pojazdach marki Opel
Na szczęście powoli zmierzamy ku Europie - jeśli nie liczyć tego "drobnego" faktu, iż od dawna stanowimy jej integralną część - i nowe modele pojazdów jeżdżące po naszych drogach coraz częściej nie odbiegają od tych sprzedawanych za naszą zachodnią granicą lub różnią się tylko nieznacznie. Niestety, nadal nie każdego stać na bogate wyposażenie, które niejednokrotnie podnosi komfort prowadzenia czy podróżowania, co powoduje, że tematyka motoryzacyjna dość często gości na łamach czasopism dla elektroników, a materializuje się tam w postaci różnych urządzeń elektronicznych poprawiających komfort użytkowania auta.
Jednym z takich projektów był prezentowany przeze mnie w 2008 roku na łamach Elektroniki Praktycznej projekt TID - sterownik będący prostym systemem automatyki, współpracującym z oryginalnymi wyświetlaczami pokładowymi typu TID montowanymi w pojazdach marki Opel.
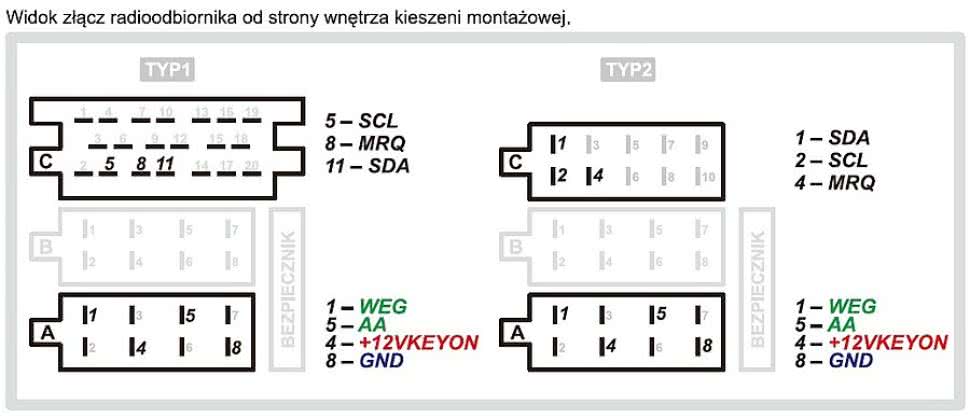
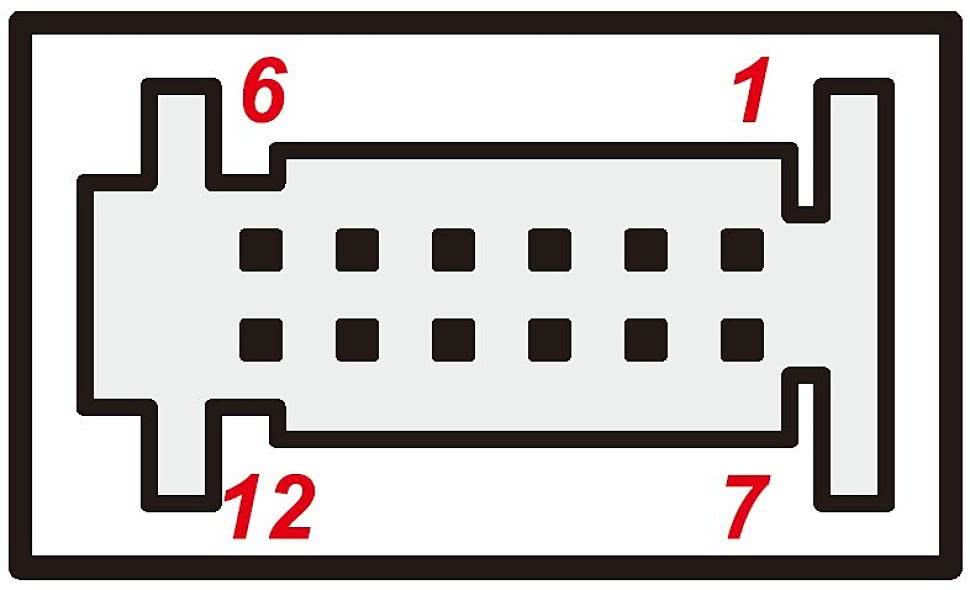
Rysunek 1. Rodzaje złącz radioodbiornika w autach marki Opel wraz z opisem wyprowadzeń
Był on jednak pewnym kompromisem pomiędzy prostotą implementacji a zastosowanym sposobem współpracy z wyświetlaczem pokładowym, co powodowało pewne problemy komunikacyjne z wybranymi egzemplarzami wyświetlaczy pokładowych typu TID. Czas więc na rozwiązanie tego problemu oraz zbudowanie kompleksowego systemu typu "komputer pokładowy", współpracującego z wyświetlaczami montowanymi seryjnie w pojazdach marki Opel.
Zanim jednak przejdę do schematu samego sterownika warto przypomnieć kilka ważnych informacji dotyczących wyświetlaczy instalowanych seryjnie w Oplach. Firma Opel od wielu lat stosuje zewnętrzne, zintegrowane z deską rozdzielczą, podświetlane wyświetlacze LCD, których funkcje zależne są od modelu pojazdu, jego wyposażenia, roku produkcji oraz modelu wyświetlacza. Ogólnie rzecz ujmując można wyróżnić kilka typów wyświetlaczy, których ogólne porównanie umieszczono w tabeli 1.
Poza tymi podstawowymi różnicami, w zależności od roku produkcji pojazdu, stosowano różną organizację wyświetlaczy. Starsze pracowały miały obszar o rozdzielczości 1×8 znaków (w tym tylko wielkie litery) dostępny dla radioodbiornika, a co za tym idzie - dla urządzeń zewnętrznych, plus dodatkowe piktogramy obrazujące tryb pracy radioodbiornika.
Rysunek 2. Wygląd złącza wyświetlacza typu TID
Nowsze wyświetlacze mają obszar 1×10 znaków (ASCII, znak 5×7 pikseli) plus piktogramy w dolnym wierszu, a górny wiersz zarezerwowano dla wbudowanego systemu mikroprocesorowego (zegar, termometr). Dodatkowo, przewidziano możliwość synchronizacji wbudowanego zegara czasu rzeczywistego sygnałem RDS z radioodbiornika.
Możliwość implementacji komplikuje nieco fakt stosowania różnych typów złącz wyświetlaczy, lecz dla naszego sterownika ma to mniejsze znaczenie, gdyż jest on dołączany do złącza radioodbiornika, które miało jedynie 2 układy wyprowadzeń (nie licząc najnowszego z sygnałami magistrali CAN). Na rysunku 1 pokazano wspomniane dwa typy złącz radioodbiornika z opisem interesujących nas wyprowadzeń (z punktu widzenia projektu).
Od 2005 lub 2006 r. firma Opel zdecydowała się (wzorem innych producentów w branży motoryzacyjnej) na zastosowanie pełnej, aczkolwiek nieco uproszczonej magistrali CAN we wszystkich nowych pojazdach, co pociągnęło za sobą potrzebę implementacji tego rodzaju sygnałów także, jeśli chodzi o wyświetlacze LCD.
Niemniej jednak, w zdecydowanej większości popularnych modeli pojazdów tej marki znajdziemy wyświetlacze, które mogą współpracować z naszym układem. Jako "modelowy" został wybrany został 10-znakowy, 2-wierszowy wyświetlacz TID montowany seryjnie w Oplach: Agila, Astra G, Meriva czy Corsa.
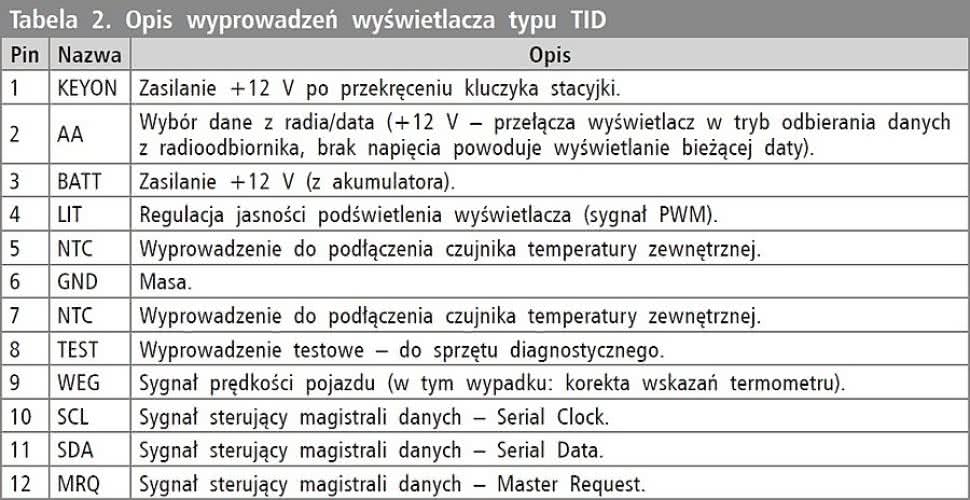
Tabela 2. Opis wyprowadzeń wyświetlacza typu TID
Z powodzeniem zastosujemy nasz układ także w wybranych modelach Vectry B, Zafiry (wyposażonych w wyświetlacz TID) czy też Astry G (wyposażonych w wyświetlacz MID). Musimy jednak zwrócić uwagę na to, iż muszą to być wyświetlacze z 10-znakowym polem, dostępnym dla radioodbiornika (wynika to z programu obsługi i adresu wyświetlacza).
Należy jednak zauważyć, że po niewielkiej modyfikacji programu obsługi jest możliwa współpraca prezentowanego urządzenia ze starszymi typami wyświetlaczy TID/DID o organizacji 8-znakowej. Na rysunku 2 przedstawiono wygląd złącza wyświetlacza tego typu, zaś w tabeli 2 opis jego wyprowadzeń (jak wspomniano wcześniej, istnieją także inne wersje).
Jak widać po opisie wyprowadzeń, wyświetlacz jest systemem mikroprocesorowym wyposażonym w dodatkowe funkcje (oprócz możliwości wyświetlania danych z magistrali), takie jak: wbudowany kalendarz, zegar, termometr. Kolejną ciekawą sprawą jest rodzaj interfejsu - jest on zbliżony funkcjonalnością i definicją do I²C, lecz ma dodatkowy sygnał sterujący - MRQ (Master Request).
Sygnał ten został prawdopodobnie wprowadzony dla kontroli stanu magistrali (zwarcia, nieciągłości itp.) oraz uproszczenia sterowania w relacji Master <-> Slave. O fakcie tym świadczy chociażby sekwencja sygnałów sterujących (tzw. Power On Test) wysyłanych przez radioodbiornik po włączeniu zasilania, a mających na celu sprawdzenie stanu i sprawności interfejsu oraz obecności wyświetlacza.
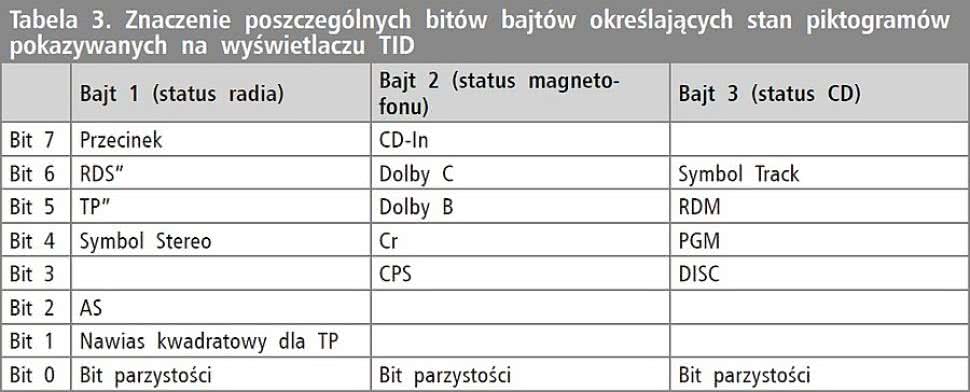
Tabela 3. Znaczenie poszczególnych bitów bajtów określających stan piktogramów pokazywanych na wyświetlaczu TID
Dopiero później, po takim cyklu, następuje właściwa transmisja danych, na które składają się adres wyświetlacza, 3 bajty sterujące zaświecaniem różnych piktogramów symbolizujących stan pracy radioodbiornika oraz 10 bajtów reprezentujących tekst do wyświetlenia. W tabeli 3 umieszczono znaczenie poszczególnych bitów trzech bajtów sterujących zaświecaniem odpowiednich piktogramów widocznych na wyświetlaczu.
Szczegóły dotyczące sekwencji startowej (Power On Test) oraz ramki transmisji pokazano na rysunku 3 i rysunku 4.
Na tym etapie znamy już sporo szczegółów dotyczących interesujących nas wyświetlaczy TID. Pora przyjrzeć się projektowi komputera. Zacznijmy od funkcjonalności oraz założeń projektowych. Prezentowany tutaj układ TIDex jest zaawansowanym systemem sterującym pełniącym rolę pełnowartościowego komputera pokładowego, współpracującego z oryginalnymi wyświetlaczami montowanymi w samochodach marki Opel (TID/MID z typową magistralą I²C+MRQ).
Jak wspomniano na początku, układ ten jest udoskonaloną i znacznie bardziej rozbudowaną wersją sterownika TID-sterownik. W stosunku do swojego poprzednika wyeliminowano wszystkie znane problemy dotyczące współpracy sterownika z niektórymi typami wyświetlaczy typu TID.
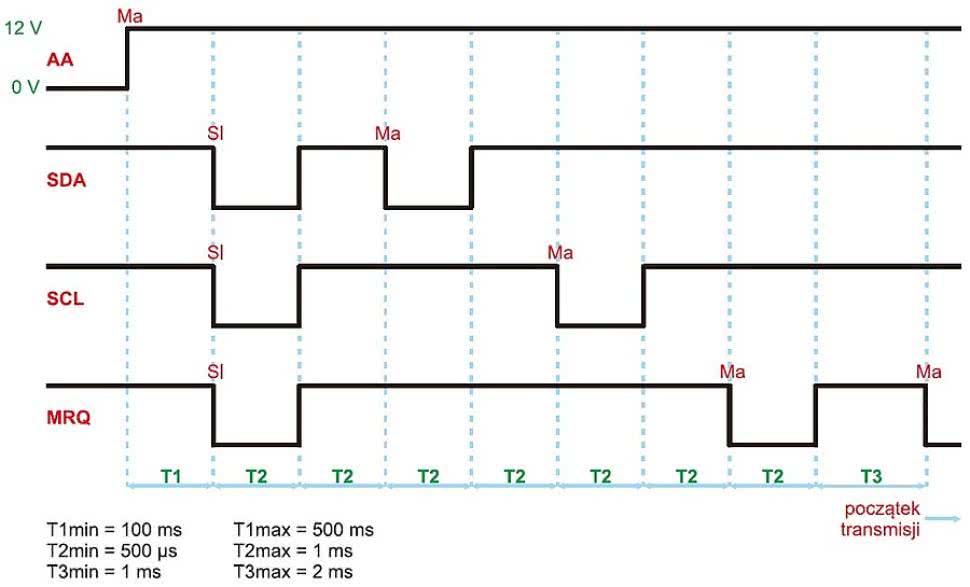
Rysunek 3. Przebiegi sygnałów sterujących podczas sekwencji startowej tzw. Power On Test
Zmieniono diametralnie sposób współpracy urządzenia z oryginalnym wyświetlaczem, co zapewniło wyeliminowanie wszystkich niedogodności, które były wynikiem kompromisu w poprzedniej konstrukcji (w tej chwili sygnał sterujący wyświetlaczem nie jest współdzielony, lecz przełączany po zakończeniu transmisji danych). Ponadto, TIDex realizuje następujące funkcje:
- Steruje pracą układu klimatyzacji manualnej utrzymując zadaną temperaturę wewnątrz pojazdu poprzez automatyczny dobór prędkości pracy wentylatora dmuchawy i/lub włączanie/wyłączanie sprężarki układu klimatyzacji.
- Pokazuje temperaturę wewnątrz pojazdu.
- Zapewnia funkcję automatycznego włącznika świateł mijania po osiągnięciu przez pojazd prędkości >5 km/h.
- Pokazuje chwilową prędkość pojazdu (w km/h).
- Pokazuje średnią prędkość pojazdu na zadanym odcinku drogi (w km/h).
- Pokazuje maksymalną prędkość pojazdu na zadanym odcinku drogi (w km/h).
- Pokazuje chwilowe zużycie paliwa (w l/godz. dla prędkości ≤5 km/h oraz l/100 km dla pozostałych prędkości).
- Pokazuje średnie zużycie paliwa (w l/100 km).
- Pokazuje całkowite zużycie paliwa (w l).
- Pokazuje przejechany dystans od ostatniego kasowania (w km).
- Pokazuje liczbę uruchomień zapłonu.
- Pozwala na wyświetlenie dowolnego napisu użytkownika.
- Zapewnia współpracę z oryginalnym radioodbiornikiem korzystającym z wyświetlacza TID.
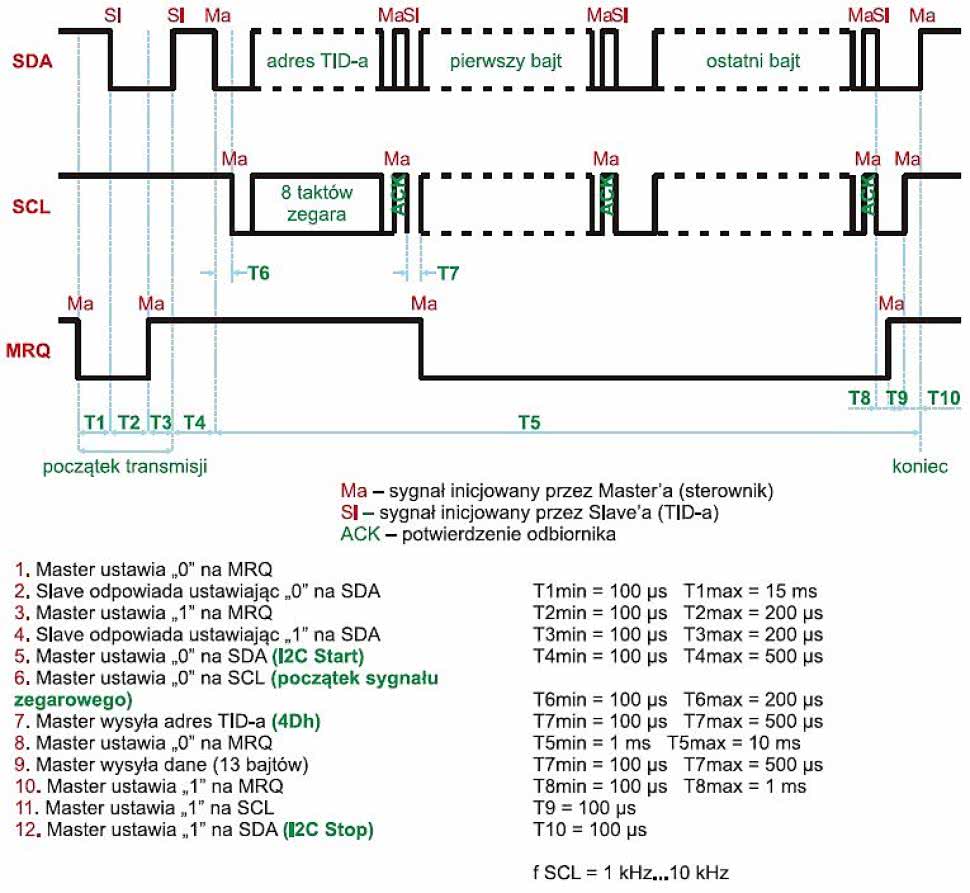
Rysunek 4. Przebiegi sygnałów sterujących podczas ramki transmisji wyświetlacza TID
Realizację pierwszej z funkcjonalności zapewniono poprzez automatyczne załączanie/wyłączanie sprężarki układu klimatyzacji oraz odpowiednie dostosowywanie intensywności nawiewu wentylatora dmuchawy (w zależności od różnicy pomiędzy temperaturą zadaną a zmierzoną wewnątrz pojazdu). Funkcję tę zrealizowano dzięki zastosowaniu grupy 4 przekaźników dużej mocy, których styki wykonawcze podłączyć należy do styków wyłącznika układu klimatyzacji manualnej (A/C) oraz styków przełącznika biegów wentylatora dmuchawy (wybierającego odpowiedni opór rezystora dmuchawy).
Tego typu sterowanie nie zostało wybrane przypadkowo. Jest ono po prostu bezpieczne dla sprężarki układu klimatyzacji, gdyż wspomniany wcześniej wyłącznik układu klimatyzacji podaje jedynie sygnał sterujący do sterownika modułu kontroli nadwozia BCM, a ten ostatni "decyduje" o chwili i możliwości załączenia sprężarki dostosowując parametry pracy silnika i zapobiegając niekorzystnym warunkom pracy sprężarki.
Dodatkowo, odpowiednio dobrana histereza regulacji minimalizuje częstość cyklów załącz/wyłącz wspomnianego układu. Dla przykładu: w przypadku ustawienia żądanej temperatury na wartość 20°C, sterownik włączy sprężarkę układu klimatyzacji przy temperaturze 21,5°C wewnątrz auta i będzie schładzał wnętrze pojazdu aż do osiągnięcia temperatury 20°C natomiast włączy wentylator nawiewu w trybie "zimowym" (uruchomi automatykę w celu ogrzania wnętrza pojazdu), gdy temperatura wewnątrz auta spadnie do 18,5°C i będzie utrzymywał taki stan aż do osiągnięcia ustawionych 20°C.
Automatyka sterowania biegami wentylatora nawiewu włączy 1-bieg wentylatora przy różnicy temperatur pomiędzy temperaturą ustawioną a zmierzoną wewnątrz pojazdu do 3°C, pomiędzy 3°C a 6°C różnicy włączy 2-bieg zaś powyżej 6°C różnicy włączy 3-bieg wentylatora. Do zadań użytkownika układu TIDex, w przypadku tej automatyki, należy zatem ustawienie kierunku nawiewu powietrza (za pomocą odpowiedniego pokrętła) oraz jednorazowy dobór temperatury chłodnego (dla trybu pracy "letniej") lub ciepłego (dla trybu pracy "zimowej") powietrza układu wentylacji - także za pomocą dedykowanego pokrętła.
Po dokonaniu tych ustawień oraz wprowadzeniu zadanej temperatury dla sterownika (i/lub innych ustawień), urządzenie steruje w sposób automatyczny załączaniem/wyłączaniem układu A/C oraz doborem prędkości nawiewu wentylatora dmuchawy, dla trybu "letniego" lub samym doborem prędkości nawiewu wentylatora dmuchawy, dla trybu pracy "zimowej". Odpowiedni bieg wentylatora dobierany jest na podstawie różnicy pomiędzy temperaturą nastawioną (żądaną) a rzeczywistą jak wspomniano powyżej.
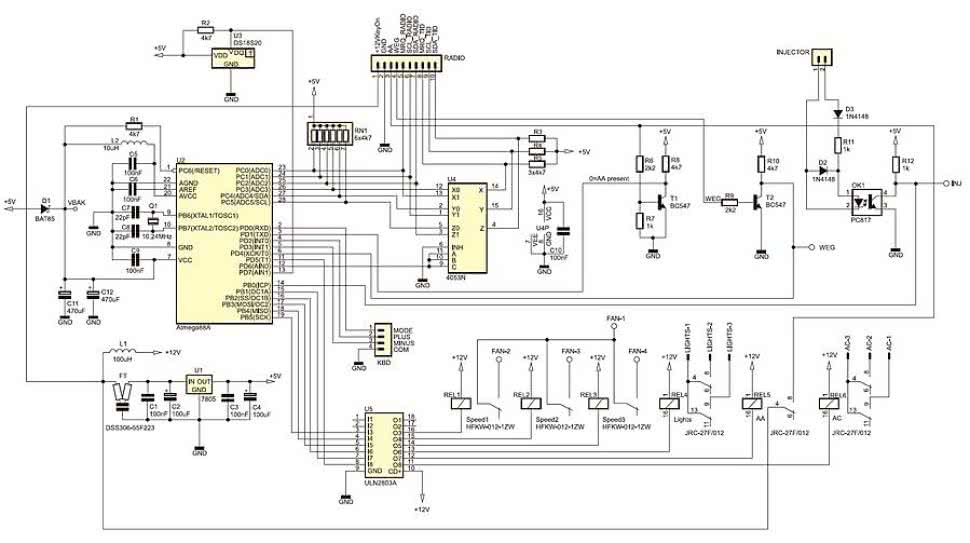
Rysunek 5. Schemat ideowy sterownika TIDex
Kolejną funkcją, w jaką wyposażono nasz sterownik jest możliwość automatycznego załączania świateł mijania po osiągnięciu przez pojazd prędkości >5 km/h. W celu realizacji tej funkcjonalności (jak i kolejnych) układ TIDex wykorzystuje tzw. sygnał prędkości pojazdu dostępny dla przykładu w złączu radioodbiornika (służy tam do automatycznego zwiększania głośności radia w funkcji prędkości pojazdu), a samo załączenie realizuje poprzez wbudowany przekaźnik dużej mocy, którego styki wykonawcze zwierają odpowiednie styki przełącznika świateł.
Pozostałe funkcje, w jakie wyposażono urządzenie, niedostępne w poprzedniej konstrukcji, związane są z funkcjonalnością typowego komputera pokładowego, który daje możliwość podglądu chwilowych i średnich wartości zużycia paliwa jak i prędkości pojazdu. W celu realizacji tej funkcjonalności skorzystano z sygnału sterującego elektronicznego systemu wtrysku paliwa, dzięki któremu jednostka sterująca pracą silnika (ECU) wpływa na otwieranie i zamykanie wtryskiwaczy paliwa dozując w ten sposób wyliczoną, optymalną dawkę paliwa.
W tym celu, na płytce drukowanej urządzenia zbudowano kompletny i bezpieczny dla sterownika silnika (ECU) optoizolowany układ wejściowy, który należy podłączyć do jednego z wtryskiwaczy paliwa. Procedura wyznaczenia zużycia paliwa korzysta z pomiaru sumarycznego czasu otwarcia wtryskiwaczy paliwa (w ciągu 1 sekundy), które to zasilane są paliwem dzięki pracy pompy paliwowej zapewniającej stałe ciśnienie w układzie zasilania. W układzie takim ilość wtryśniętego paliwa jest wprost proporcjonalna do czasu wtrysku, czyli czasu otwarcia wtryskiwacza.
Wynika to z faktu, iż w nowoczesnych systemach elektronicznego wtrysku paliwa, ilość wtryśniętego paliwa jest proporcjonalna wyłącznie do czasu otwarcia wtryskiwaczy paliwa. Jest to możliwe dzięki zastosowaniu regulatora ciśnienia paliwa, który zapewnia jego stałe ciśnienie w układzie zasilania w stosunku do podciśnienia w kolektorze dolotowym, co przekłada się na stały wydatek paliwa w funkcji czasu otwarcia wtryskiwaczy.
Co prawda, wtryskiwacze mają zazwyczaj nieliniową charakterystykę w zakresie krótkich i długich czasów wtrysku (poniżej 1 ms i powyżej 15 ms), lecz wpływ tej nieliniowości w rzeczywistych warunkach pracy można w zasadzie pominąć. Niezbędną stałą wtryskiwacza, która mówi nam o ilości paliwa wtryskiwanego w jednostce czasu, wyznaczymy w naszym układzie empirycznie, choć istnieje także możliwość jej wprowadzenia podczas konfigurowania urządzenia.
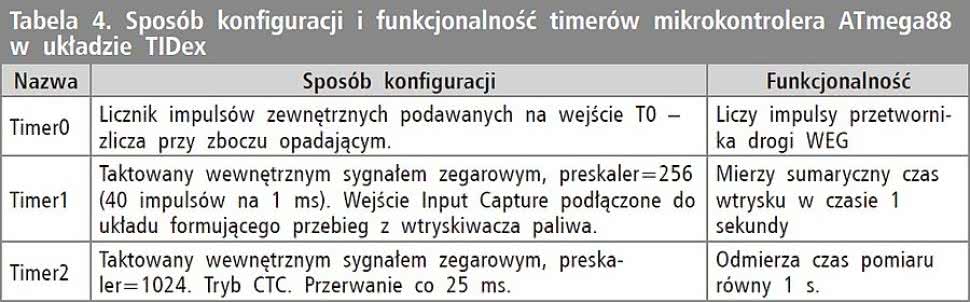
Tabela 4. Sposób konfi guracji i funkcjonalność timerów mikrokontrolera ATmega88 w układzie TIDex
Przejdźmy, zatem do schematu naszego urządzenia, który pokazano na rysunku 5. Jest to stosunkowo nieskomplikowane urządzenie zbudowane z użyciem popularnego mikrokontrolera ATmega88, scalonego termometru DS18S20, multipleksera CD4053, drivera mocy ULN2803 sterującego przekaźnikami wykonawczymi dużej mocy oraz kilku innych elementów dyskretnych.
Ponadto, na płytce układu zabudowano kompletny zasilacz układu sterownika wyposażony w szeregowo-równoległy filtr EMI firmy Murata oraz komplet wygodnych złącz pozwalających na bezproblemowe połączenie z instalacją elektryczną pojazdu. Należy zwrócić uwagę na fakt, że przekaźniki sterujące załączaniem układu klimatyzacji manualnej oraz wyłącznika świateł mają dwa komplety styków, a wynika to z faktu, iż wyłączniki odpowiadających im układów (które to styki "bocznikują") wyposażone są także w więcej niż jeden styk wykonawczy i aby poprawnie załączyć wybrany układ, należy dobrać przekaźnik o takim samym układzie styków.
Mikrokontroler, jak to zwykle bywa, stanowi "serce" niniejszego sterownika i realizuje całą, założoną funkcjonalność urządzenia posiłkując się w tym celu szeregiem wewnętrznych modułów peryferyjnych. Sam układ jest taktowany zewnętrznym rezonatorem kwarcowym 10,24 MHz, dzięki czemu zapewniono dużą dokładność pomiarów czasu. Jak wspomniano i w odróżnieniu od układu TID-sterownik, niniejsze urządzenie nie współdzieli wyświetlacza TID z oryginalnym radioodbiornikiem korzystając z wymuszonego arbitrażu danych, tak jak to miało miejsce poprzednio i co stało się źródłem problemów, tylko przełącza odpowiednie sygnały magistrali sterującej "nasłuchując" jednocześnie jej bezczynności i posługując się w tym celu scalonym multiplekserem CD4053.
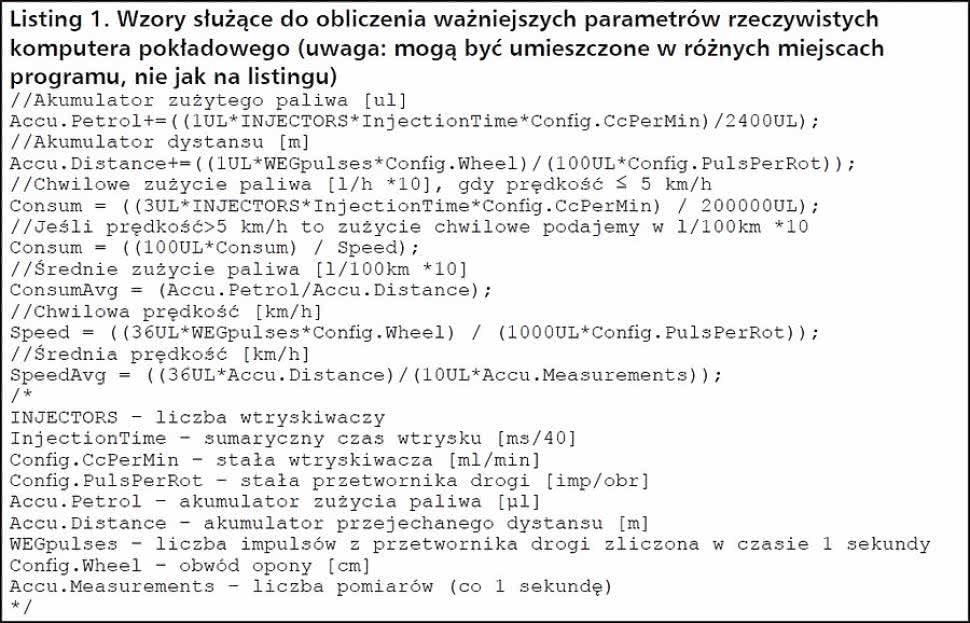
Listing 1. Wzory służące do obliczenia ważniejszych parametrów rzeczywistych komputera pokładowego (uwaga: mogą być umieszczone w różnych miejscach programu, nie jak na listingu)
Układ TIDex monitoruje także stan wyprowadzenia AA złącza radioodbiornika i w zależności od potrzeb dostarcza sygnał +12 V przełączającego tryb pracy wyświetlacza TID (dane z radia/data). W programie obsługi niniejszego sterownika wykorzystano ponadto wszystkie timery mikrokontrolera, a sposób ich konfiguracji oraz realizowaną funkcjonalność opisano w tabeli 4.
W celu pomiaru czasu trwania wtrysków zbudowano kompletny i bezpieczny układ wejściowy (przy użyciu popularnego optoizolatora PC817) formujący sygnał wtryskiwacza dla potrzeb wejściowych obwodów mikrokontrolera. Sygnał ten jest podawany na wejście przechwytujące układu czasowo-licznikowego Timer1, dzięki czemu zrealizowano pomiar czasu trwania wtrysku (akumulowany jest sumaryczny czas trwania wtrysku w okresie 1 sekundy). Na listingu 1 przedstawiono wzory służące do obliczenia ważniejszych parametrów rzeczywistych komputera pokładowego.
Na rysunku 6 przedstawiono rzeczywiste przebiegi napięć na wejściu (2) i wyjściu (1) układu formującego impulsy wtryskiwaczy paliwa (wejście bez diody obcinającej "szpilki" towarzyszące zjawisku komutacji).
Uważny Czytelnik z pewnością zauważy "dziwny" obwód zasilania mikrokontrolera zbudowany w oparciu o układ chwilowego podtrzymania zasilania złożony z diody Schottky (D1) oraz bloku kondensatorów elektrolitycznych (C11...C12). W jakim celu wprowadzono tego typu rozwiązanie sprzętowe? Ja wiadomo, układ TIDex oblicza i wyświetla średnie wartości zużycia paliwa i prędkości oraz całkowitą objętość zużytego paliwa i pokonanego dystansu.
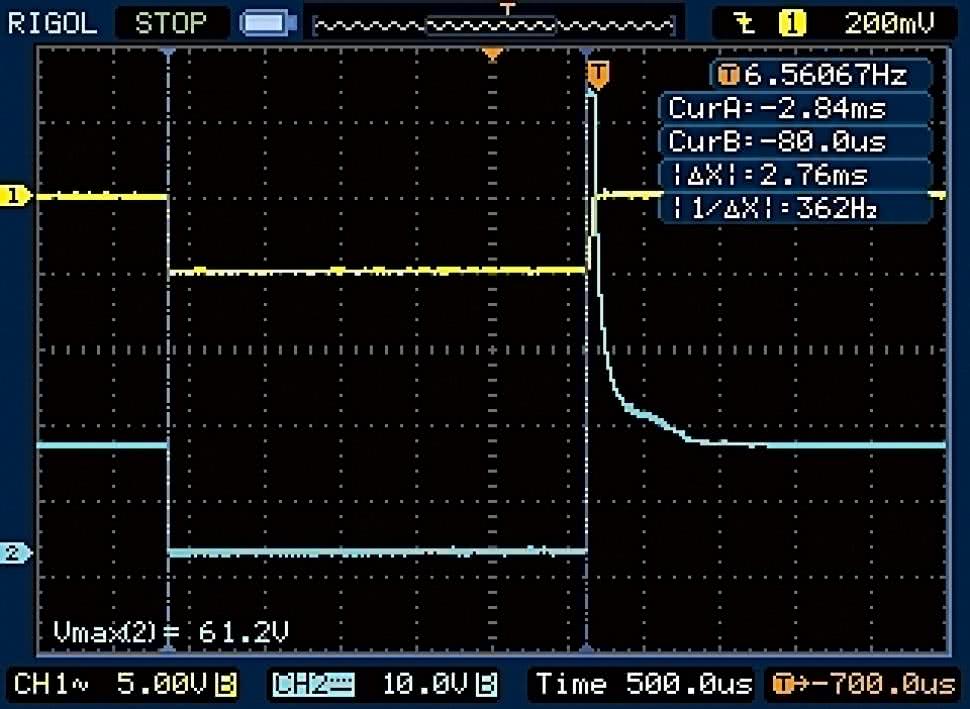
Rysunek 6. Rzeczywiste przebiegi napięć na wejściu i wyjściu układu formującego impulsy wtryskiwaczy paliwa
Jak łatwo się domyślić i co potwierdzają wzory podane powyżej, w celu wyznaczenia wspomnianych wartości obliczeniowych niezbędna jest znajomość całkowitego zużycia paliwa jak i dystansu (od momentu skasowania stosownych liczników) a co za tym idzie niezbędny staje się mechanizm akumulowania mierzonych wartości nawet po zaniku napięcia zasilającego (po wyłączeniu zapłonu). Jak wiadomo, mikrokontroler ATmega88 dysponuje nieulotną pamięcią EEPROM, jednak pamięć tego typu zapewnia ograniczoną (zwykle ok. 100 tys.) liczbę gwarantowanych cyklów zapisu.
Jak i kiedy, w takim razie, dokonywać zapisu niezbędnych wartości obliczeniowych by nie spowodować szybkiego uszkodzenia tejże pamięci? Odpowiedź wydaje się dość prosta, choć samo rozwiązanie całkiem interesujące. Niezbędne wartości obliczeniowe "zebrane" w specjalną strukturę danych zaopatrzoną w sumę kontrolną CRC8 zapisywane są każdorazowo przy wyłączaniu zapłonu.
W celu detekcji momentu wyłączania zapłonu zastosowano wbudowany w mikrokontroler przetwornik ADC pracujący w trybie Free Running i monitorujący kilka tysięcy razy na sekundę napięcie Vbak, czyli napięcie zasilające wyłącznie mikrokontroler (po zaniku zasilania dioda D1 zapewnia separację zasilania mikrokontrolera od reszty urządzenia a kondensatory C11...C12 zapewniają odpowiedni czas podtrzymania zasilania). Co ciekawe, na pierwszy "rzut oka" nie wydaje się by nasz sterownik w jakikolwiek sposób używał przetwornika A/C, gdyż żaden z kanałów wejściowych nie jest przez niego w tym celu używany.

Rysunek 7. Wykres zależności napięcia podtrzymania w funkcji czasu w momencie wyłączenia zapłonu
To prawda, patrząc na schemat układu i nie mając do dyspozycji listingu programu można by wysnuć taki wniosek. Jest jednak inaczej. Przetwornik A/C mierzy specjalne, wewnętrzne napięcie odniesienia VBG=1,1 V (dla mikrokontrolera ATmega88) dzięki temu, iż wewnętrzny, analogowy multiplekser przetwornika może zostać właśnie w ten sposób ustawiony.
Napięciem odniesienia jest z kolei napięcie zasilające mikrokontroler, czyli napięcie dostarczane na wyprowadzenie AVCC (Vbak). Spadek tego napięcia, podczas wyłączania zapłonu, powoduje wzrost wartości wyniku przetwarzania według wzoru jak niżej (korzystamy z 8-bitowej rozdzielczości przetwornika): VADC = (VBG×256)/Vbak.
Procedura obsługi przerwania przetwornika A/C każdorazowo sprawdza czy nie został przekroczony zdefiniowany wcześniej próg obliczeniowy, a jeśli ma to miejsce, to inicjuje proces zapisywania danych krytycznych do wbudowanej pamięci EEPROM, po czym czeka, aż napięcie zasilania spadnie do poziomu zerowania mikrokontrolera, które to jest dokonywane przez uruchomiony wcześniej układ BOD (typowo przy wartości 2,7 V).
Wspomniany próg zadziałania ustawiono na wartość 4,3 V, co oznacza, że czas opadania napięcia zasilającego od wartości 4,3 V do wartości 2,7 V jest czasem, w którym mikrokontroler musi przeprowadzić zapis wszystkich danych krytycznych - w naszym przypadku 20 bajtów danych.
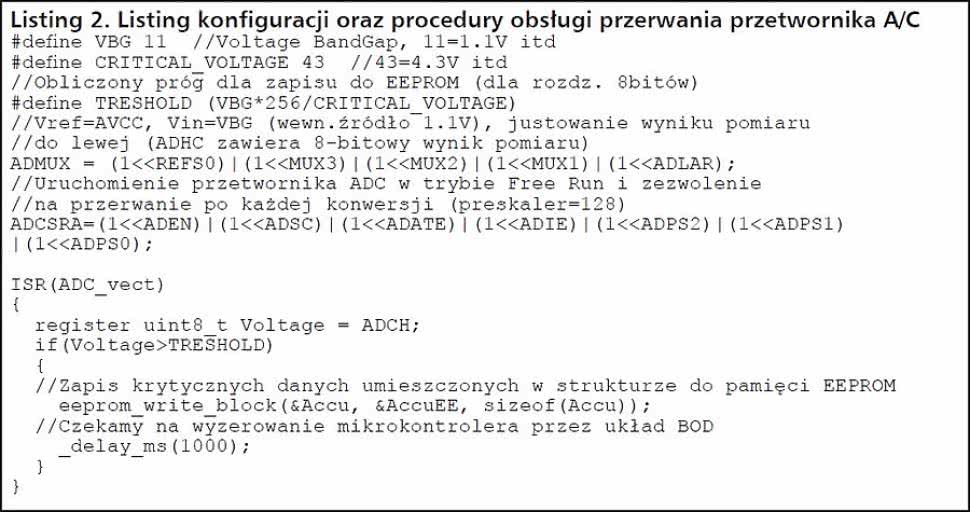
Listing 2. Listing konfi guracji oraz procedury obsługi przerwania przetwornika A/C
Jak pokazały testy praktyczne, zastosowanie wspomnianego wcześniej rozwiązania sprzętowego (dioda D1 i kondensatory C11...C12) i mechanizmów programowych zapewnia 100% skuteczność zapisu danych z bardzo dużym marginesem czasowym. Wykres zależności napięcia podtrzymania w funkcji czasu w momencie wyłączenia zapłonu pokazano na rysunku 7.
Jak widać, czas dostępny na zapis danych wynosi około 240 ms, co dla wymaganej maksymalnej wartości rzędu 66 ms (20 bajtów po 3,3 ms na zapis 1 bajta) daje spory margines bezpieczeństwa. Co oczywiste, potencjalne uszkodzenie w bloku sprzętowym odpowiedzialnym za podtrzymanie napięcia zasilającego skutkować będzie błędnymi zapisami pamięci EEPROM, gdyż dołączana (do struktury danych) suma kontrolna nie będzie zgodna z oczekiwaną.
W takim przypadku układ TIDex poinformuje użytkownika wyświetlając komunikat Save Error tuż po włączeniu zasilania (dokładnie w czasie sprawdzania integralności danych zachowanych w pamięci EEPROM. Listing zawierający funkcję konfigurującą przetwornik A/C oraz procedury obsługi jego przerwania pokazano na listingu 2.
Wykaz elementówRezystory: Kondensatory: Półprzewodniki: Inne: |
Montaż i dołączenie
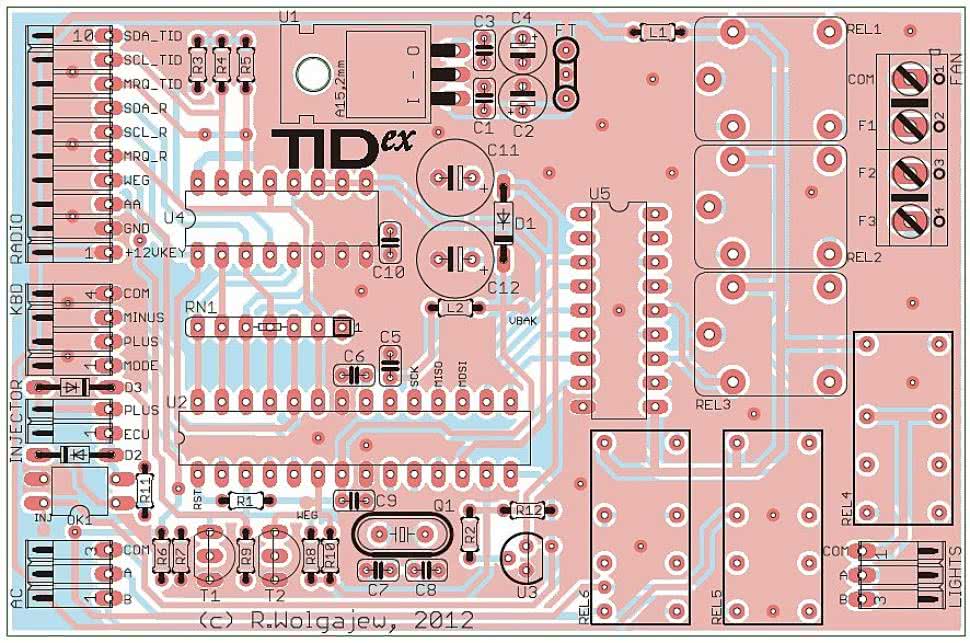
Rysunek 8. Schemat montażowy komputera samochodowego TIDex
Schemat montażowy układu TIDex pokazano na rysunku 8. Zaprojektowano dość zwarty, dwustronny obwód drukowany o uporządkowanej organizacji elementów przeznaczonych do montażu przewlekanego. Co bardzo ważne, w wypadku środowisk o sporej liczbie zaburzeń, którym bez wątpienia jest instalacja samochodowa, zadbano o odpowiednie prowadzenie masy oraz sygnałów krytycznych.
Montaż rozpoczynamy od wlutowania rezystorów, następnie montujemy kondensatory, przekaźniki, złącza i podstawki a na końcu półprzewodniki. Należy zwrócić szczególną uwagę na konieczność ocynowania grubą warstwą cyny ścieżek przewodzących duże prądy tj. ścieżek styków wykonawczych przekaźników REL1...REL3. Połączenie komputera z instalacją samochodową powinno być wykonane przez doświadczonego elektryka lub elektronika samochodowego, najlepiej przy odłączonym akumulatorze.
Urządzenie należy zamontować w suchym miejscu, z dala od obwodów elektronicznych, których działanie mogłoby zakłócać funkcjonowanie sterownika (np. sterownik silnika ECU, moduł kontroli nadwozia BCM czy alarm), zaopatrując w odpowiednią ekranowaną obudowę chroniącą przez zwarciem, zawilgoceniem, uszkodzeniem mechanicznym i zakłóceniami EMI.
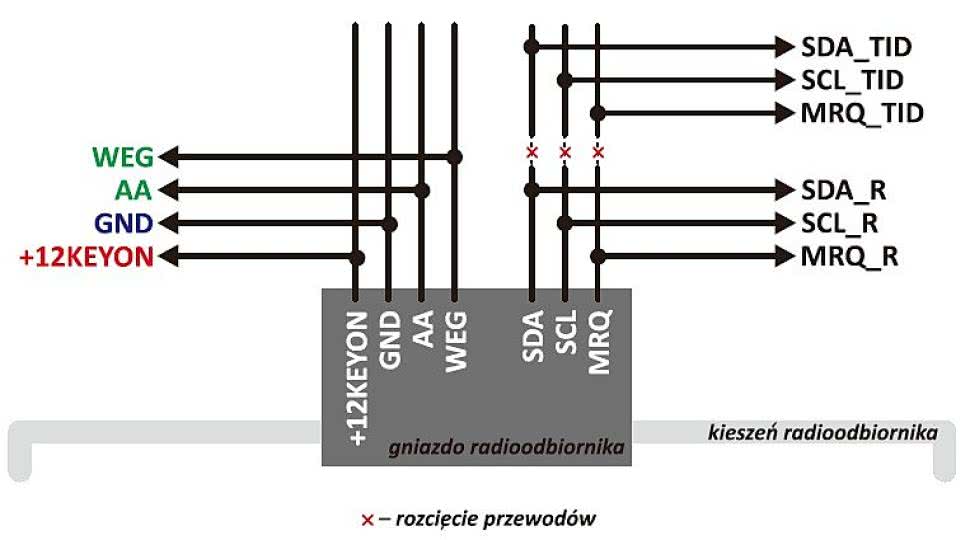
Rysunek 9. Sposób podłączenia układu TIDex do gniazda radioodbiornika
Z uwagi na sposób włączenia, układ TIDex najlepiej zamontować w pobliżu złącza radioodbiornika, gdyż w tym miejscu dostępnych jest większość sygnałów przyłączeniowych. Połączenia magistrali sterującej (SCL, SDA i MRQ) powinny zostać wykonane przewodem ekranowanym. W celu wykorzystania wszystkich dostępnych funkcji urządzenia, sterownik należy podłączyć do następujących "modułów" samochodu:
- Złącze radioodbiornika: to podstawowe podłączenie umożliwiające zasilenie układu, po włączeniu stacyjki, oraz współpracę z wbudowanym wyświetlaczem TID.
- Panel sterowania nawiewem i klimatyzacją: to podłączenie umożliwia automatyczne sterowanie układem klimatyzacji manualnej oraz wentylatorem nawiewu (bardzo ważny jest w tym przypadku przekrój przewodów połączeniowych z uwagi na duże prądy - min. 1,5 mm²).
- Panel sterowania wyłącznikiem świateł: to podłączenie umożliwia automatyczne włączanie świateł mijania.
- Wtryskiwacz paliwa: to podłączenie umożliwia realizację funkcji komputera pokładowego.
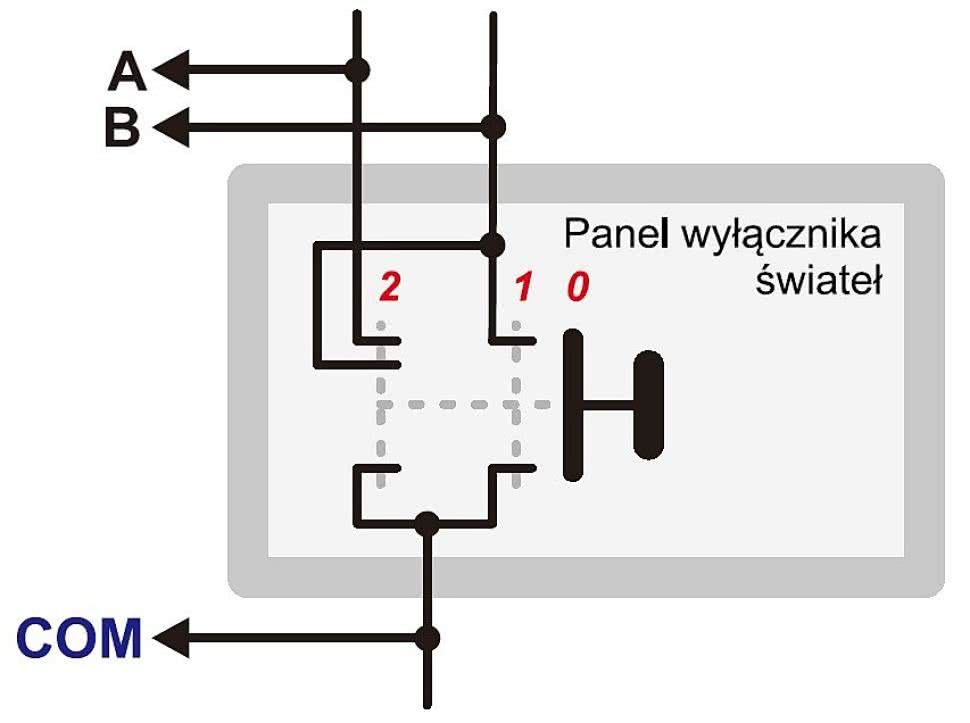
Rysunek 10. Sposób podłączenia układu TIDex do modułu wyłącznika świateł
Układ TIDex wyposażono w zintegrowany, dokładny termometr scalony, który powinien być przyłączony do płytki urządzenia za pomocą 3-żyłowego odcinka przewodu. Należy eksperymentalnie dobrać miejsce zamocowania czujnika, aby odwzorować średnią temperaturę panującą wewnątrz pojazdu i uniknąć niepotrzebnych załączeń automatyki. Unikać należy montażu czujnika w pobliżu nawiewów, drzwi, okien itp.
Najlepszym miejscem wydaje się być tylna część tunelu środkowego bądź kieszeń-schowek pod radioodbiornikiem. Warto także podkreślić, iż w niektórych wersjach samochodów, wyposażonych w 2 typ złącza radioodbiornika, nie występuje sygnał prędkości pojazdu WEG (końcówka 1) wykorzystywany do realizacji automatycznego włącznika świateł jak i realizacji funkcjonalności komputera pokładowego. W takim wypadku sygnał ten można pobrać ze złącza wyświetlacza TID/MID.
Zgodnie z tym, co napisano wcześniej, poniższy sterownik realizuje swoje funkcje przy użyciu przekaźników dużej mocy, których styki wykonawcze podłączone są do styków odpowiadających im wyłączników zamontowanych oryginalnie w pojeździe. Dodatkowo, należy zwrócić uwagę na fakt, iż przekaźniki sterujące załączaniem układu klimatyzacji manualnej oraz wyłącznika świateł posiadają dwa komplety styków, co wynika wyłącznie z faktu, iż wyłączniki odpowiadających im układów (których to styki "bocznikują") wyposażone są także w więcej niż jeden styk wykonawczy i aby "poprawnie" załączyć wybrany układ należy dobrać przekaźnik o takim samym układzie styków. Zasadę połączeń tego typu na przykładzie samochodu Opel Meriva z roku 2004 pokazano na rysunkach 9...11.
Ustawienia ważniejszych bitów fuse:CKSEL3...0: 0111 |
Sposób dołączenia urządzenia do wtryskiwacza paliwa
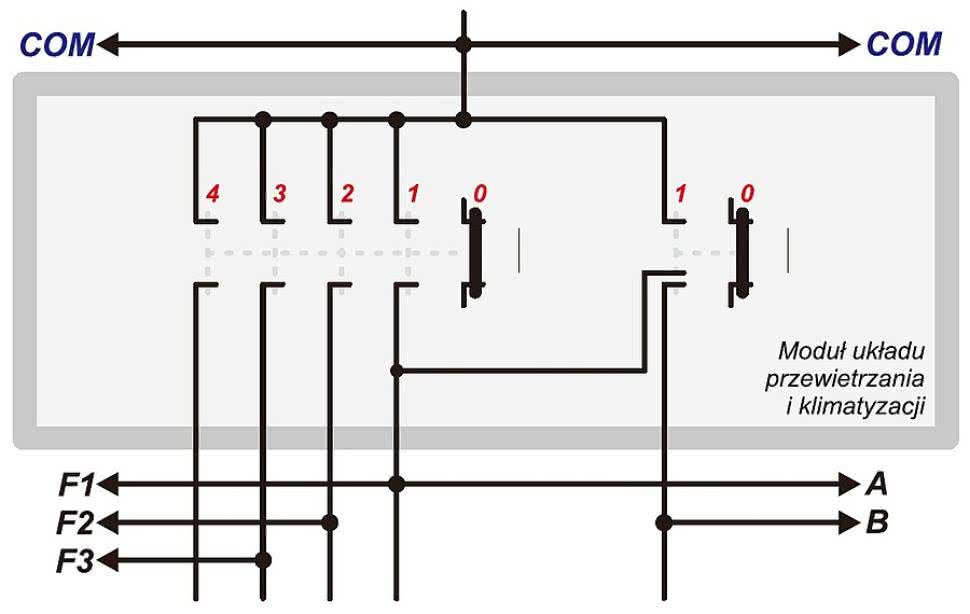
Rysunek 11. Sposób podłączenia układu TIDex do modułu przełącznika biegów wentylatora dmuchawy i wyłącznika układu klimatyzacji A/C
Podłączenie układu w tym zakresie należy wykonać nader starannie zachowując dużą ostrożność, by nie doprowadzić do zwarcia przewodów zasilających wtryskiwacz, co mogłoby skutkować uszkodzeniem wyjściowych obwodów sterujących elektronicznego układu sterującego pracą silnika ECU.
Każdy wtryskiwacz ma dwa wyprowadzenia: pierwsze z nich to sygnał +12 V, który zostaje załączony po przekręceniu kluczyka stacyjki i który to należy doprowadzić do wejścia PLUS naszego komputera. Drugie wyprowadzenie to sygnał sterujący z modułu ECU (komutowana masa), który należy dołączyć do wejścia ECU naszego urządzenia.
Wspomniane przewody należy starannie zabezpieczyć przed możliwością ewentualnego przetarcia izolacji i powstania zwarcia - dotyczy to zwłaszcza otworów przelotowych, przez które zostaną one przeprowadzone. Aby maksymalnie zabezpieczyć wejściowy układ pomiarowy czasu wtrysku przed zaburzeniami (np. od będącej zwykle w pobliżu listwy zapłonowej), najlepiej zastosować dwużyłowy przewód ekranowany o odpowiednim przekroju, zaś ekran tego przewodu podłączyć po obu stronach do masy pojazdu.
Jest także możliwe dołączenie układu formującego impulsy wtryskiwaczy paliwa bezpośrednio do odpowiedniego wyjścia sterownika silnika ECU, na którym występuje przebieg sterujący praca wtryskiwaczy. W takim wypadku należy odpowiednio zmniejszyć wartość rezystora R11 wyznaczającego prąd diody LED transoptora PC817. Na rysunku 12 zamieszczono rysunek montażowy układu TIDex z opisem wyprowadzeń poszczególnych złącz.
Obsługa
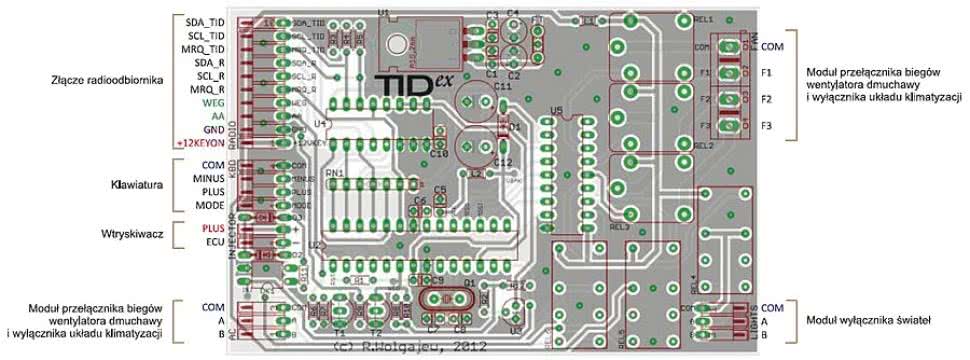
Rysunek 12. Rysunek montażowy układu TIDex z opisem wyprowadzeń poszczególnych złącz
Komputer TIDex może być zamontowany w samochodach wyposażonych w oryginalny lub nieoryginalny radioodbiornik. W pierwszym wypadku współdzieli on wyświetlacz z radioodbiornikiem. Wszystkie funkcje układu obsługujemy poprzez system Menu a bieżący stan pracy jest zapamiętywany każdorazowo po wyłączeniu zasilania.
Aktualny tryb działania oraz stany poszczególnych układów są sygnalizowane poprzez odpowiednie komunikaty oraz za pomocą wybranych piktogramów umieszczonych na wyświetlaczu TID, których to znaczenie w przypadku naszego sterownika jest następujące:
- znacznik "Cr" oznacza załączenie sprężarki układu klimatyzacji,
- znacznik "TP" oznacza załączenie układu automatyki klimatyzacyjnej.

Rysunek 13. Dostępne tryby pracy układu TIDex wraz z opisem dodatkowej funkcjonalności elementów regulacyjnych
Obsługa urządzenia odbywa się za pomocą 3 przycisków umownie oznaczonych PLUS, MINUS i MODE, które należy dołączyć do odpowiednich wyprowadzeń na płytce sterownika (przyciski zwierają odpowiednie wyprowadzenia z masą układu). Jak łatwo się domyślić, przyciski PLUS i MINUS służą do poruszania się po Menu oraz do zmiany aktualnie wyświetlanych parametrów pracy, natomiast przycisk MODE służy do wejścia w tryb regulacji temperatury automatyki układu klimatyzacji oraz pełni też inne funkcje, w zależności od stanu pracy urządzenia.
Dodatkowo, w większości z trybów pracy, długotrwałe przytrzymanie przycisków PLUS i MINUS zwiększa szybkość regulacji wybranego parametru urządzenia. Oprócz wspomnianej powyżej funkcjonalności, przyciski MINUS i MODE mają dodatkowe funkcje: długie przyciśnięcie przycisku MODE powoduje zapisanie bieżącego trybu pracy urządzenia w nieulotnej pamięci układu, aby tryb ten stał się aktywnym po ponownym włączeniu zapłonu, zaś długie przyciśnięcie przycisku MINUS powoduje wykasowanie liczników dystansu i średnich wartości obliczeniowych.
Wszystkie dostępne tryby pracy sterownika pokazano na rysunku 13, a na rysunku 14 pokazano diagram obrazujący system Menu oraz sposób obsługi urządzenia (symbole przycisków wypełnione kolorem czarnym oznaczają długie naciśnięcie wybranego przycisku).
Setup i tryb kalibracji stałej wtrysku
Urządzenie TIDex wyposażono w specjalny, konfiguracyjny tryb pracy, dzięki któremu możemy określić niezbędne parametry regulacyjne nieodzowne z punktu widzenia funkcjonalności komputera pokładowego. Ten tryb pracy uruchamiamy poprzez naciśnięcie i przytrzymanie przycisku MODE podczas włączania urządzenia (czyli zapłonu), co zasygnalizowane zostanie przez sterownik wyświetleniem komunikatu "Setup, wait". W tym trybie pracy urządzenia możemy określić wielkość następujących stałych niezbędnych w procesie obliczania zużycia paliwa, prędkości jazdy oraz drogi:
- Stała wtryskiwacza (w [ml/min]): jest to wielkość charakterystyczna dla każdego wtryskiwacza elektronicznego wtrysku paliwa informująca nas o ilości paliwa, jakie może on wprowadzić do komory spalania w jednostce czasu (przy założeniu 100% czasu otwarcia zaworu i stałym, charakterystycznym dla każdego wtryskiwacza ciśnieniu zasilającym).
- Stała przetwornika drogi (impulsatora, w [imp/obr]): jest to wielkośc charakterystyczna dla każdego impulsatora informująca nas o liczbie impulsów przypadających na 1 obrót koła (osi); w większości nowych modeli marki Opel jest to wartość 29 imp/obr.
- Obwód opony (w [cm]).
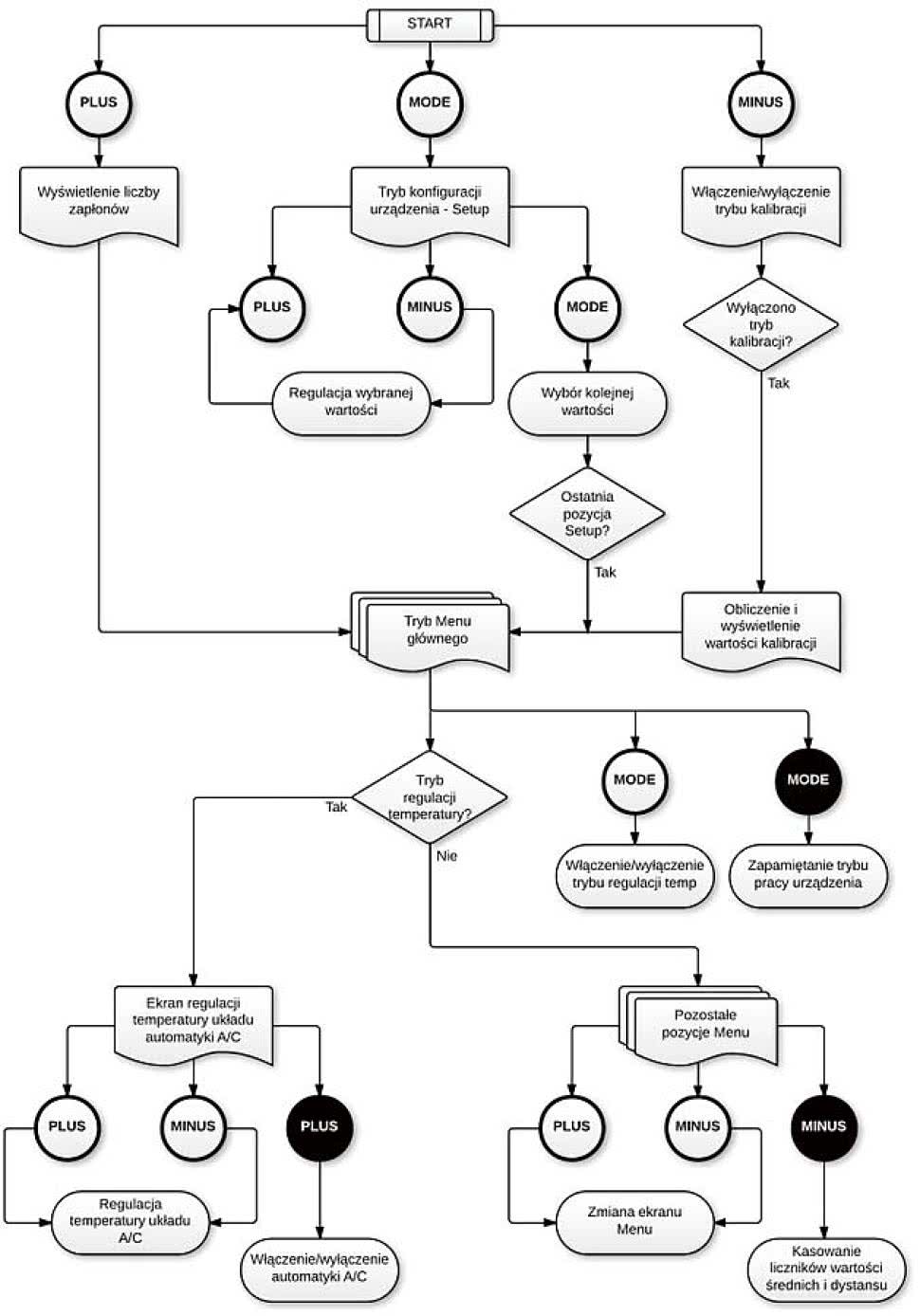
Rysunek 14. Diagram obrazujący system Menu i sposób obsługi układu TIDex
Wspomniane stałe można znaleźć w Internecie posiłkując się wszelkiego rodzaju forami o tematyce elektronicznej. Obwód opony, a w zasadzie drogę, jaką pokona pojazd w czasie jednego, pełnego obrotu koła należy wyznaczyć empirycznie. W tym celu zaznaczamy (np. kredą) najniżej położone miejsce styku opony z powierzchnią drogi, następnie standardowo obciążony pojazd przetaczamy tak by koło wykonało jeden, pełen obrót, po czym mierzymy pokonany odcinek drogi.
Ostatnią pozycją Menu trybu konfiguracyjnego jest możliwość wprowadzenia własnego napisu użytkownika, który to możemy później wywołać jako jeden z trybów pracy urządzenia. Wszystkie wprowadzone wartości zostaną zachowane w nieulotnej pamięci EEPROM urządzenia, po czym sterownik przejdzie do normalnego trybu pracy. Niestety, jak pokazała praktyka, pewnych trudności może czasami nastręczać znalezienie parametrów stosowanych w naszym pojeździe wtryskiwaczy, ponieważ te elementy są często wykonywane na zamówienie producenta pojazdu i na próżno szukać ich oznaczeń na stronach producentów stosownych podzespołów.
Aby jakoś zaradzić temu problemowi przewidziano pewien mechanizm, za pomocą którego sterownik TIDex jest w stanie samodzielnie wyznaczyć poszukiwaną stałą na podstawie informacji o zużytym paliwie i pomiarze sumarycznego czasu wtrysków. Do tego celu wykonano specjalny tryb kalibracyjny, który może zostać uruchomiony poprzez naciśnięcie i przytrzymanie przycisku MINUS podczas włączania urządzenia, co zasygnalizowane zostanie przez sterownik wyświetleniem komunikatu "Calibr. On".
Ponowne wykonanie wspomnianych czynności (podczas ponownego włączania urządzenia z uruchomionym wcześniej trybem kalibracyjnym) powoduje obliczenie i wyświetlenie żądanej stałej wtryskiwacza a następnie opuszczenie procesu kalibracji sygnalizowane wyświetleniem komunikatu "Calibr.Off".
Co oczywiste, do czasu zakończenia procesu kalibracji nie są dostępne następujące wartości obliczeniowe: chwilowe, średnie i całkowite zużycie paliwa (jest to sygnalizowane wyświetleniem komunikatu "Calibr. On" dla odpowiednich pozycji Menu). Aby przeprowadzenie procesu kalibracji miało w ogóle sens należy zastosować następujący algorytm postępowania:
- Zużyć całe, dostępne paliwo, aż do zaświecenia się lampki sygnalizującej tzw. rezerwę paliwa.
- Zatankować 20l paliwa.
- Uruchomić procedurę kalibracji.
- Zużyć całe, dostępne paliwo (zatankowane wcześniej 20l), aż do ponownego zaświecenia się lampki sygnalizującej tzw. rezerwę paliwa.
- Zakończyć procedurę kalibracji.
Po wykonaniu tych czynności układ TIDex obliczy, wyświetli i zapisze w nieulotnej pamięci wartość stałej wtryskiwacza, po czym przejdzie do normalnego trybu pracy. Gdyby obliczona przez sterownik wartość stałej wtryskiwacza powodowała zaniżanie lub zawyżanie rzeczywistego spalania paliwa, w każdej chwili możemy dokonać odpowiedniej jej korekty poprzez wejście w system Setup i zwiększenie (w przypadku zaniżania spalania) lub zmniejszenie (w przypadku zawyżania spalania) wspomnianej wartości.
Należy zaznaczyć, iż tak jak w przypadku oryginalnych rozwiązań typu "komputer pokładowy", obliczane wartości zużycia paliwa są obarczone pewnym niewielkim błędem wynikającym choćby z założenia stałego ciśnienia zasilającego wtryskiwacz czy też z zaokrągleń obliczeniowych. Warto podkreślić, iż program obsługi sterownika podlega ciągłemu rozwojowi, więc liczba dostępnych opcji może być większa aniżeli wyszczególniona powyżej (w tej chwili program obsługi zajmuje 70% pojemności pamięci Flash mikrokontrolera).
Już w czasie testów końcowych dodano nową opcję dającą możliwość podglądu liczby uruchomień zapłonu - opcję tę wywołujemy poprzez wciśnięcie i przytrzymanie przycisku PLUS podczas włączania urządzenia. Za uruchomienie zapłonu uważane jest załączenie zapłonu i utrzymanie takiego stanu przez czas minimum 10 sekund.
Robert Wołgajew, EP