Zaloguj
Zaloguj



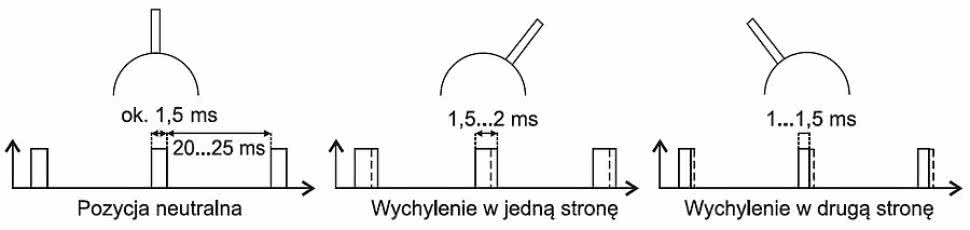
Rysunek 1. Związek między położeniem drążka a przebiegiem na wyjściu odbiornika
Opisany projekt urządzenia służy do sterowania dwoma silnikami prądu stałego za pomocą "impulsów serwomechanizmowych" przesyłanych przez aparaturę do zdalnego sterowania do odbiornika. Silniki są zasilane za pośrednictwem elementów wykonawczych w postaci mostków H.
Aparatura lotnicza jest przeznaczona głównie do sterowania serwomechanizmami, chociaż coraz częściej do napędu modeli są używane również silniki elektryczne, więc można nabyć tzw. regulator modelarski i za pomocą aparatury kontrolować pracę silników prądu stałego - najczęściej trójfazowych. Informacja o kierunku wychylenia drążka w nadajniku i odchyleniu od położenia zerowego jest odtwarzana w odbiorniku w postaci ciągu impulsów napięciowych o szerokości zależnej od położenia dźwigni.
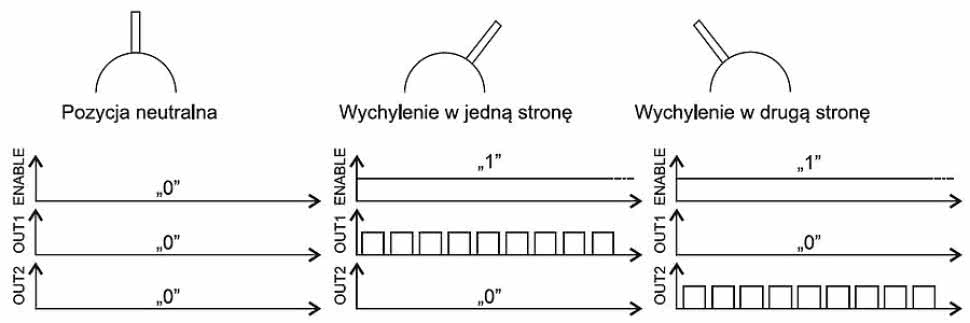
Rysunek 2. Sygnały sterujące silnikiem, które generuje układ
Zwykle, w popularnych aparaturach, te impulsy są powtarzane co 20...25 ms - pokazano to na rysunku 1. Typowe impulsy sterujące silnikiem pokazano na rysunku 2. Jest to sytuacja przykładowa, zworki umożliwiają dodatkową konfigurację tych wyjść.
Sterowanie, które daje najwięcej możliwości manewrowych, to odrębne sterowanie każdego z silników, gdzie każdy napędza koło (lub koła) na jednej stronie pojazdu: lewej i prawej. Umożliwia to np. skręcanie pojazdu w miejscu, kiedy jedna strona jedzie w kierunku przeciwnym do drugiej. Dlatego obydwa kanały działają niezależnie od siebie, może nawet działać tylko jeden z nich. Kompletny schemat blokowy takiego sterowania znajduje się na rysunku 3.
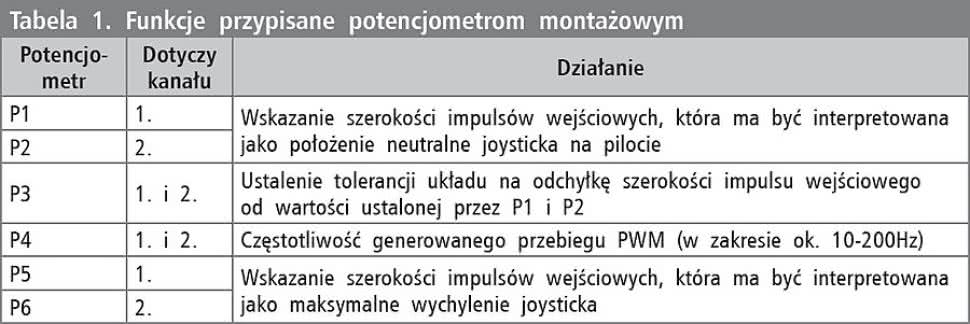
Tabela 1. Funkcje przypisane potencjometrom montażowym |
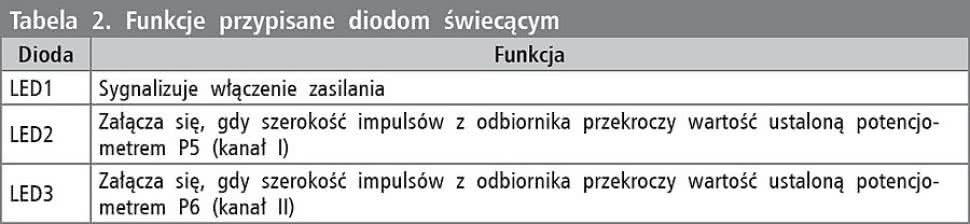
Tabela 2. Funkcje przypisane diodom świecącym |
Opis schematu
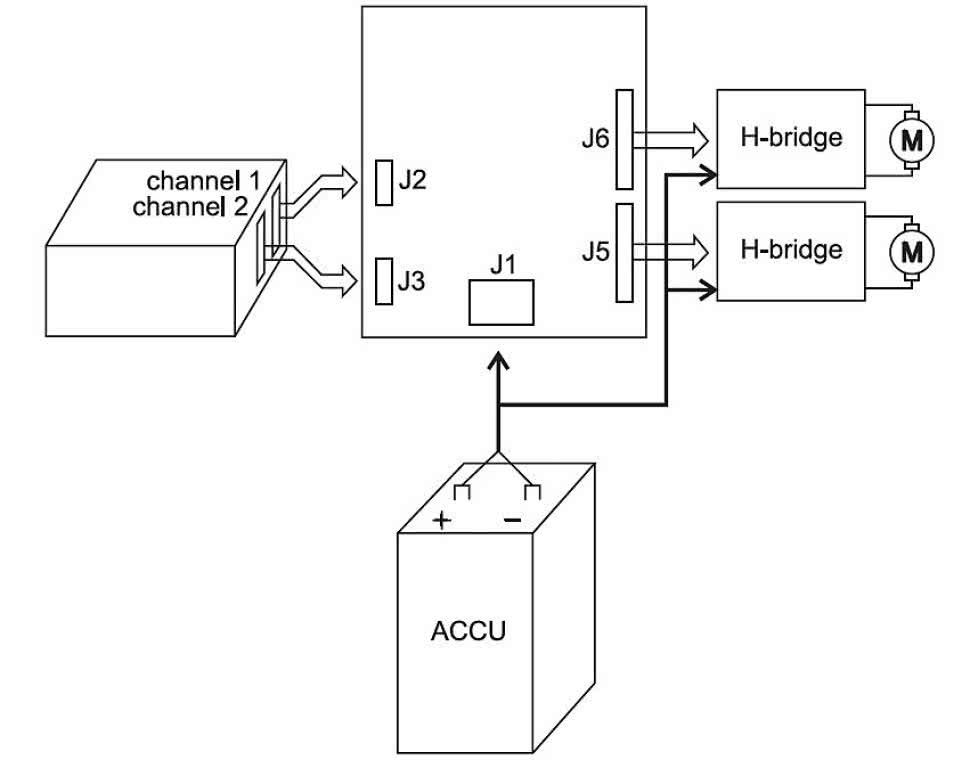
Rysunek 3. Schemat blokowy układu sterowania silnikami
Schemat ideowy znajduje się na rysunku 4. Głównym elementem jest dobrze znany mikrokontroler ATmega8 firmy ATMEL. Źródłem sygnału zegarowego jest wewnętrzny generator, stabilizowany kwarcem o częstotliwości rezonansowej 16MHz.
Użycie tak dużej częstotliwości pozwoliło na uzyskanie możliwie dużej rozdzielczości pomiaru szerokości impulsów, a stabilizacja kwarcem - małą zależność od temperatury.
Zasilanie o wartości 5V dostarczane jest ze stabilizatora LDO typu LM2931D-5V w obudowie SO8. Dioda D1 nie tylko zabezpiecza ten układ, jak i kondensator C1, przed zgubnymi skutkami odwrotnego podłączenia przewodów zasilających, lecz również pełni rolę jednostronnie działającej blokady, która uniemożliwia kondensatorowi gwałtowne rozładowanie się w chwili, gdy pobór prądu przez mechanizmy jest duży i napięcie z akumulatora drastycznie spadło. Takie rozwiązanie znacząco redukuje możliwość zawieszenia się mikrokontrolera wskutek wahań napięcia zasilającego.
Sygnały z odbiornika są wprowadzane do mikrokontrolera za pośrednictwem tranzystorów T1 i T2. Nie tylko negują one ten sygnał, co jest mało istotne, lecz, co sporo ważniejsze, zapewniają dopasowanie poziomów logicznych: wystarczy, aby logiczna "jedynka" na wyjściu odbiornika miała wartość większą niż ok. 0,7V, aby spowodowała nasycenie tranzystora i obniżenie potencjału jego kolektora do wartości rzędu 100mV. Rezystory R1 i R2 znacząco ograniczają prądy baz, przez co wyjście odbiornika nie jest zanadto obciążane. Rezystory R3 i R4 wspomagają wbudowane w mikrokontroler rezystory podciągające.
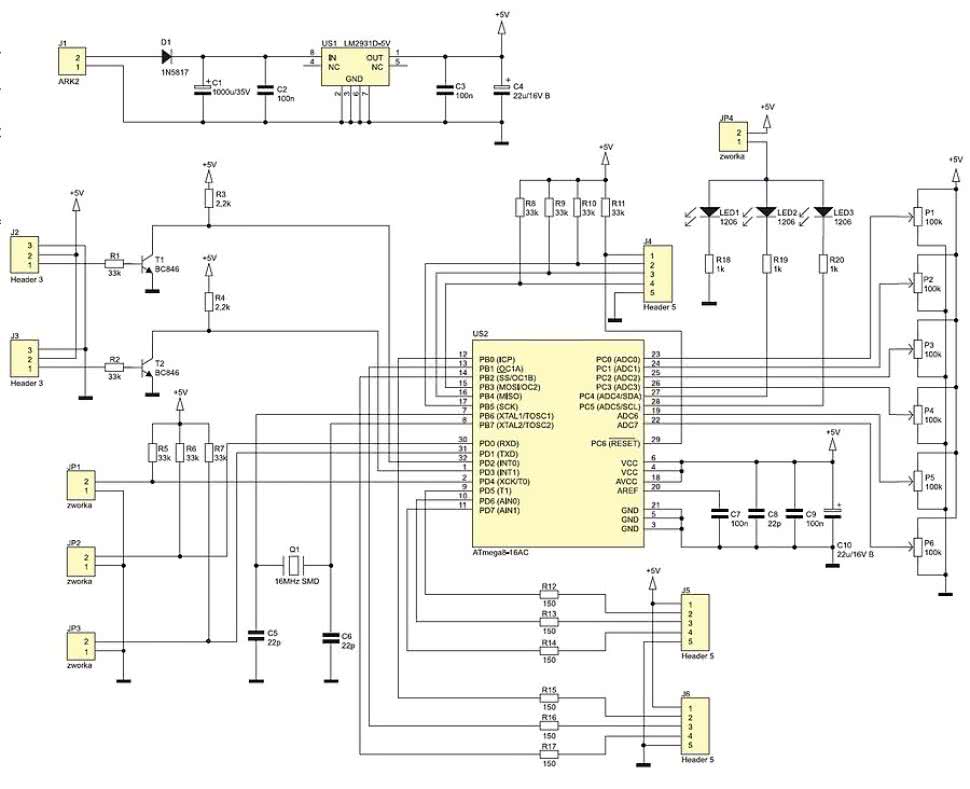
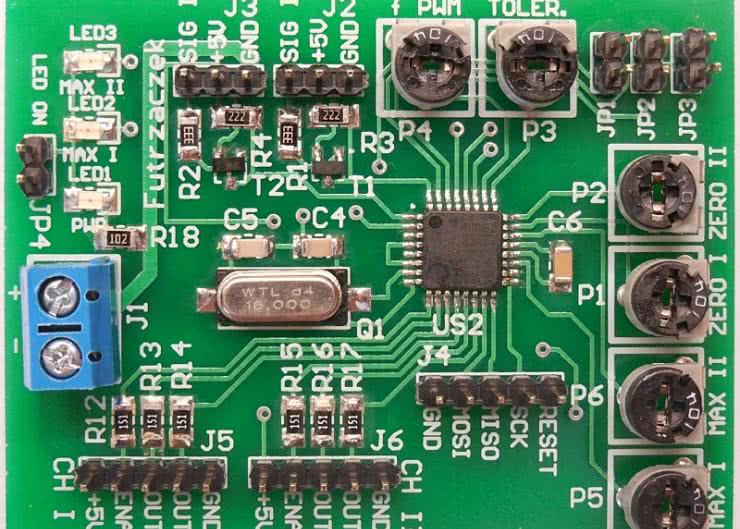
Rysunek 4. Schemat ideowy sterownika
Zworki JP1-JP3 służą konfiguracji wyjść sterujących. Rolę pomocniczą pełnią diody LED1-LED3. Ich funkcje opisano w dalszej części artykułu, a odłączyć je można zworką JP4.
Do kalibrowania układu jest przeznaczonych sześć potencjometrów P1-P6, które zostały włączone jako dzielniki napięcia zasilającego. Wewnętrzny przetwornik A/D odczytuje z nich poziom napięcia i w ten sposób oblicza zadane parametry. Jest to sposób bardzo wygodny w regulacji, a użycie napięcia zasilania jako referencyjnego dla przetwornika gwarantuje, iż nawet jego zmiany nie spowodują zmiany odczytów.
Mikrokontroler można zaprogramować za pośrednictwem złącza J4, do którego wyprowadzono wszystkie linie potrzebne do programowania w układzie (ang. ISP).
Na złączach J5 i J6 mikrokontroler wystawia stany logiczne sterujące mostkami H. Poziomy napięć odpowiadają logice TTL, czyli 0/5V. Rezystory R12-R17 ograniczają prąd przez te linie płynący, gdyby doszło do przypadkowego zwarcia. Każde ze złącz ma:
- masę (GND) i zasilanie 5V dla logiki sterującej mostka (+5V),
- wyprowadzenie ENABLE, które jest aktywowane w momencie załączenia silnika; można go użyć do uaktywnienia mostka H, o ile takowe wejście posiada (jak np. L298),
- dwie linie sterujące OUT1 i OUT2, które służą do kontrolowania gałęzi mostka. W stanie spoczynku, obydwie są w sanie logicznego "0"; w momencie uruchomienia silnika, jedna z nich jest przełączana na logiczną "1", zależnie od kierunku odchylenia dźwigni nadajnika od położenia neutralnego.
Wykaz elementówRezystory: (SMD 1206) Kondensatory: Półprzewodniki: Inne: |
Montaż i uruchomienie
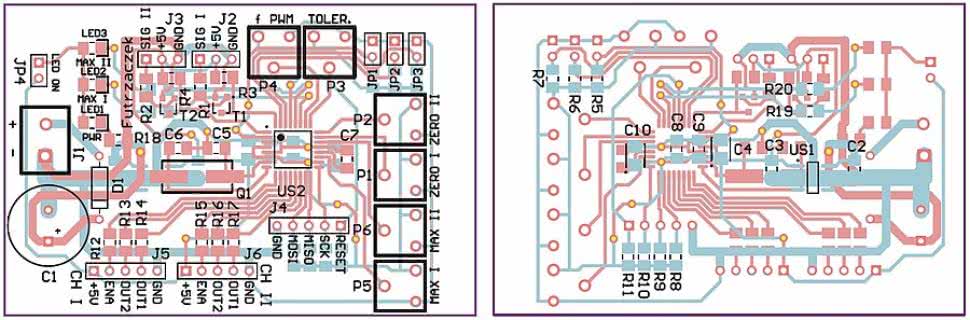
Rysunek 5. Schemat montażowy sterownika
Układ został zmontowany na dwustronnej płytce drukowanej pokazanej na rysunku 5. Elementy montowane są po obydwu stronach płytki, ponadto, niektóre z nich są przystosowane do montażu przewlekanego, zatem należy mieć baczenie na kolejność ich lutowania: najpierw SMD (po obydwu stronach), a THT na końcu (od najniższego do najwyższego).
Prawidłowo zmontowany układ można podłączyć do zasilania (jeszcze bez dołączania jakichkolwiek innych wtyków) i przystąpić do konfiguracji bitów zabezpieczających ustalających źródło sygnału zegarowego dla mikrokontrolera. Powinien on pracować z zewnętrznym rezonatorem kwarcowym o częstotliwości 16MHz. Po wgraniu programu układ jest gotów do działania, po wykonaniu kilkuminutowej kalibracji. Jej wykonaniu służą potencjometry montażowe P1-P6, których funkcje opisuje tabela 1. Ponadto, na płytce są również diody LED i zworki - objaśnienia do nich zawarte są w tabelach, odpowiednio, 2 i 3.
Kalibrację układu najprościej jest przeprowadzać według kroków opisanych kolejno w tabeli 5.
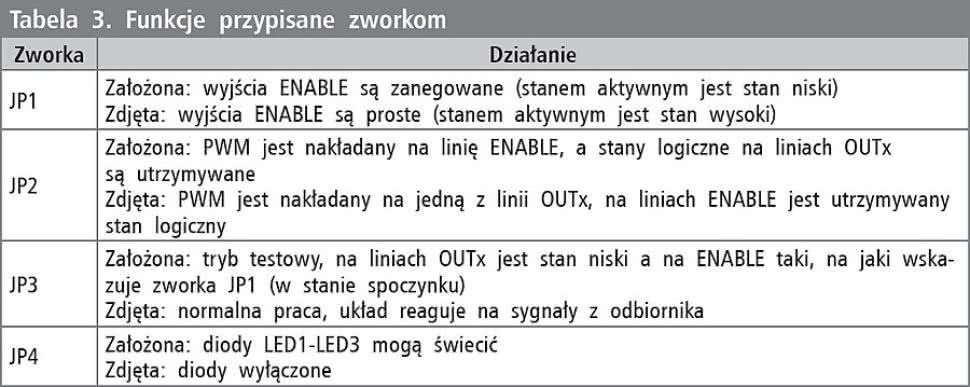
Tabela 3. Funkcje przypisane zworkom |
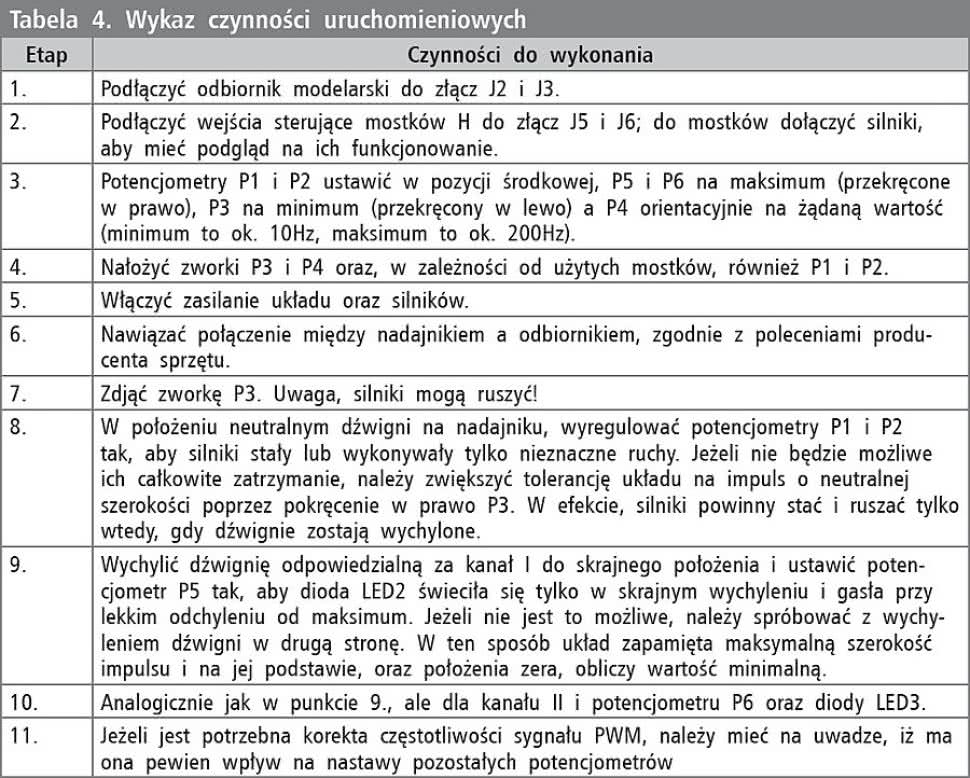
Tabela 4. Wykaz czynności uruchomieniowych |
Kilka słów należy poświęcić zasilaniu: na wejściu znajduje się stabilizator LDO typu LM2931D-5V. Do poprawnej pracy wymaga on napięcia 5,5 V lub wyższego. Przy zasilaniu układu z akumulatora 6 V może okazać się, że spadek napięcia na diodzie D1 jest zbyt duży i stabilizator nie będzie działał poprawnie, co może objawić się niekontrolowaną pracą silników. Można zastosować zworę w miejsce tej diody, należy jednak mieć wtedy na uwadze, by źródło zasilające miało możliwie mały opór wewnętrzny (np. akumulator żelowy z grubymi przewodami), aby napięcie doprowadzane do złącza J1 nie spadało poniżej wartości 5,5 V, nawet przy dużym poborze prądu.
Fotografia 6. Układ zamontowany na podwoziu samochodu podczas prowadzenia testów
Pobór prądu przez układ (bez dołączonych peryferii) to ok. 20 mA; każda dioda świecąca to dodatkowe 3 mA, lecz można je wyłączyć. Ze stabilizatora można pobierać prąd nie większy niż 100 mA, maksymalna moc strat na nim to ok. 800 mW (w temperaturze 20°C), a maksymalne napięcie wejściowe to 26 V. Należy te czynniki mieć na uwadze osadzając płytkę wewnątrz robota. Na złącza J2 i J3 wyprowadzono napięcie 5 V ze stabilizatora, które może służyć do zasilania odbiornika modelarskiego.
Na koniec, uwaga eksploatacyjna: niektóre odbiorniki przed nawiązaniem połączenia z nadajnikiem podają na swoich wyjściach poziom wysoki. Program w mikrokontrolerze uwzględnia ten przypadek i dezaktywuje kanał, jeśli stan niski lub wysoki na odpowiadającym mu wejściu trwa dłużej niż ok. 100 ms.
Dlatego, przed uruchomieniem robota z niepołączonym jeszcze odbiornikiem, dobrze jest zewrzeć wyprowadzenia zworki JP3, które można, dla wygody, wyprowadzić na przewodach do niewielkiego wyłącznika. Zabezpieczy to pojazd przed krótkim, lecz gwałtownym szarpnięciem.
Prototyp układu został zamontowany w podwoziu samochodu, a jego testy przedstawia fotografia 6.
Michał Kurzela, EP