Zaloguj
Zaloguj




Kompensacja mocy biernej to zagadnienie, o którym większość prywatnych użytkowników energii elektrycznej prawdopodobnie nie ma zielonego pojęcia. Zapewne tylko nieliczni wiedzą, co to w ogóle jest moc bierna.
Jeśli mówimy o elektryczności i mocy, niewątpliwie musi pojawić się temat płacenia comiesięcznych rachunków za energię zużywaną przez nasze urządzenia. Największego zagrożenia dla naszych portfeli obawiamy się ze strony lodówki, pralki, żelazka, może zmywarki. Korzystamy wprawdzie z żarówek energooszczędnych i oświetlenia ledowego, ale niektóre żarówki świecą się niemal na okrągło. Wszystkie komputery domowe i „chodzący” na okrągło telewizor z pewnością też nie będą pomijalne w miesięcznym bilansie energetycznym. Energia elektryczna wszystkich urządzeń elektrycznych używanych w domu jest mierzona przez jeden tzw. licznik energii (fotografia 1). Wszystkie koszty są naliczane według jego wskazań.

Dalej nie wiemy co to wszystko ma wspólnego z koniecznością kompensacji mocy biernej. Aby to zrozumieć musimy przyjrzeć się bliżej teorii, wykonać własne obliczenia, przeprowadzić symulację i eksperyment praktyczny.
Łyk teorii
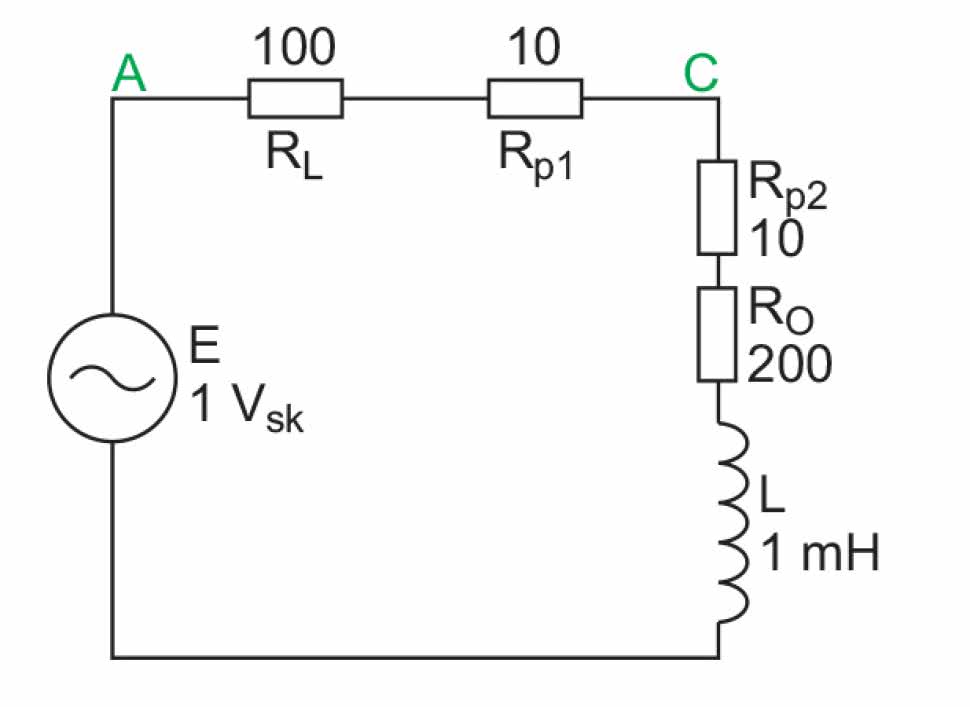
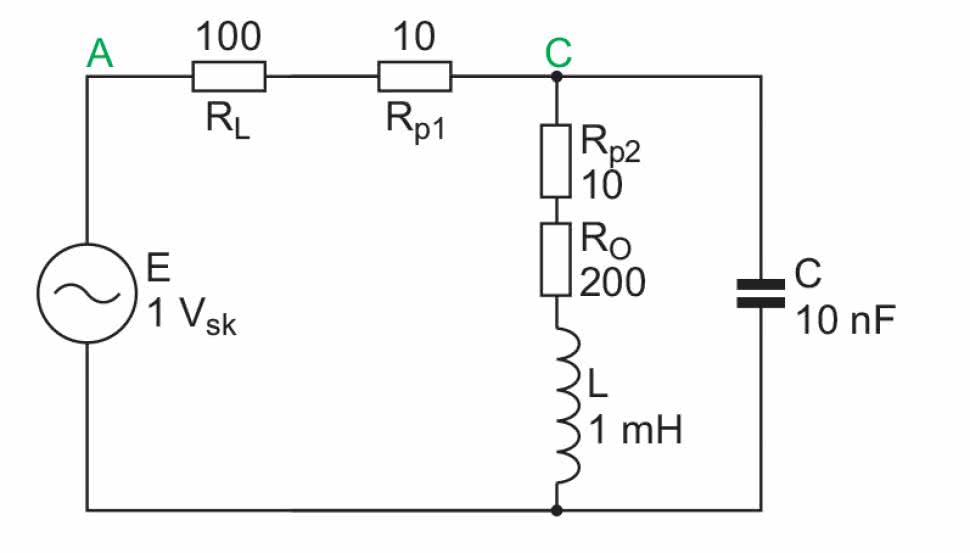
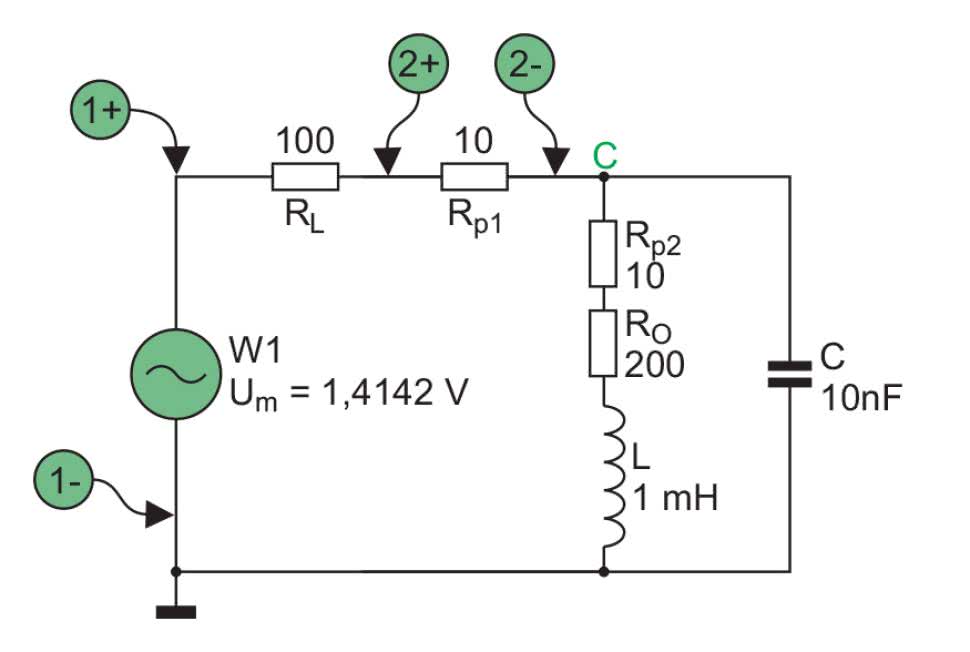
Rozpatrzmy obwód elektryczny z rysunku 2. Przedstawiono na nim w dużym uproszczeniu sieć energetyczną zasilającą urządzenia elektryczne użytkownika końcowego. Obwód składa się ze źródła napięcia przemiennego E (umownej elektrowni czy też stacji zasilającej lub tzw. transformatora), linii przesyłowej dostarczającej prąd do użytkownika symbolizowanej przez jej rezystancję RL, rezystancji odbiornika energii RO i indukcyjności obciążenia L. Na schemacie wprowadzono ponadto dwa oporniki pomiarowe Rp1 i Rp2, które będą potrzebne w pomiarach prądu.
Gdyby obciążenie było czysto rezystancyjne, jedynym problemem byłby spadek napięcia na linii przesyłowej, a tym samym obniżenie napięcia w gniazdkach użytkownika. Załóżmy, że zagadnienie to w praktyce jest pomijalne. Z przedstawionej wcześniej listy urządzeń wynika, że w większości przypadków są w nich instalowane silniki elektryczne. Zwykle są to (a przynajmniej były do niedawna) silniki indukcyjne, zatem decydują o indukcyjnym charakterze obciążenia sieci. Jakie są tego konsekwencje?
Z teorii wiemy, że w obwodzie z indukcyjnością prąd jest opóźniony względem napięcia, a kąt przesunięcia fazowego zależy od stosunku reaktancji do rezystancji. Maksymalny kąt przesunięcia występuje wtedy, gdy obwód zawiera samą indukcyjność i jest wówczas równy 90°. Wraz ze wzrostem rezystancji przesunięcie fazowe maleje. Zależności te można zilustrować za pomocą wykresów wskazowych. Na rysunku 3a pokazano taki wykres dla obwodu z rysunku 2.
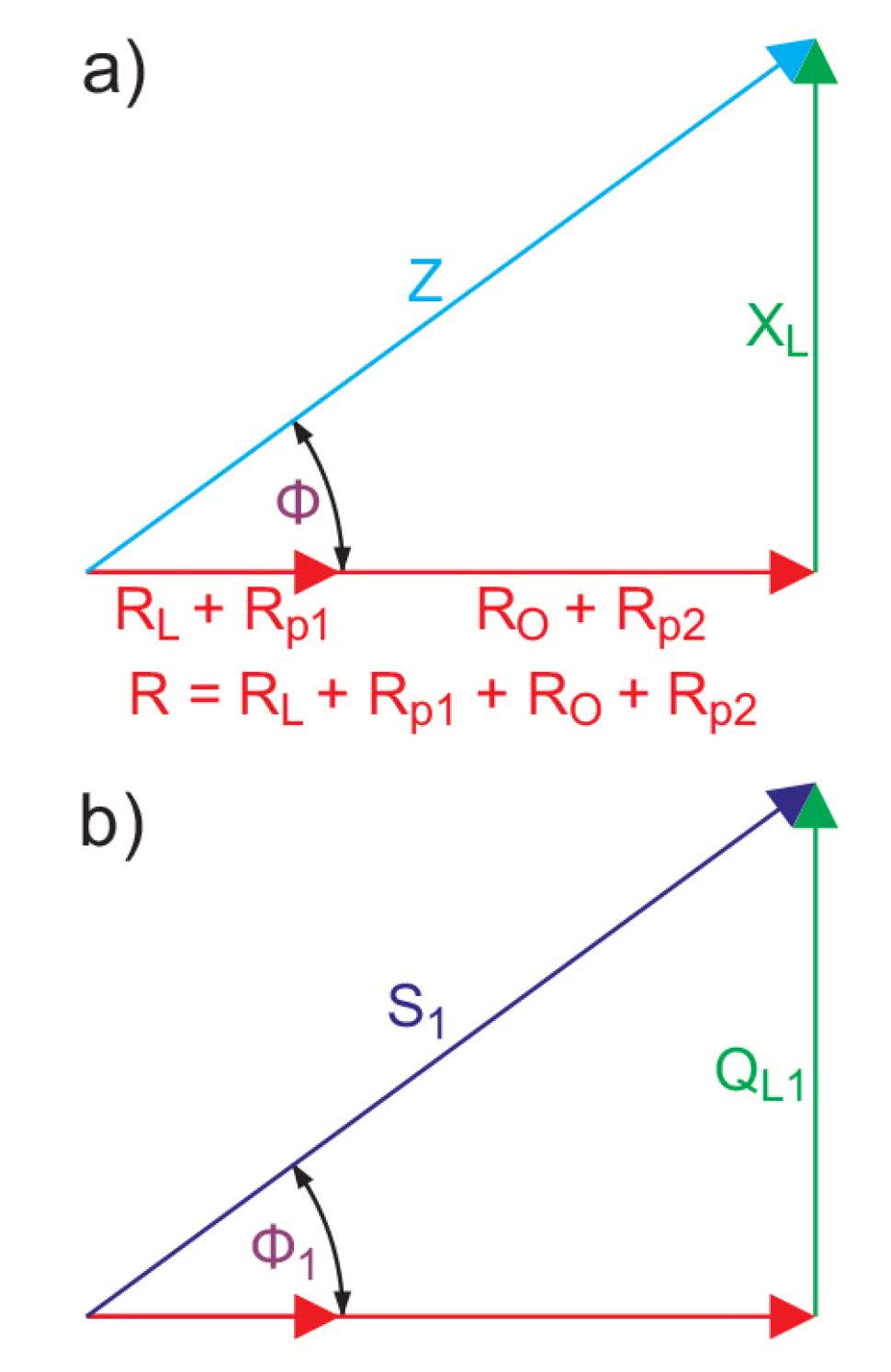
Widzimy na nim wektory symbolizujące rezystancję R składającą się z rezystancji linii zasilającej RL i rezystancji uzwojenia silnika RO oraz rezystorów pomiarowych, a także wektor XL symbolizujący reaktancję indukcyjną uzwojenia naszego wirtualnego silnika. Wektor Z, to impedancja – wypadkowy parametr decydujący o natężeniu prądu pobieranego ze źródła. Kąt pomiędzy wektorami Z i R jest równy przesunięciu fazowemu pomiędzy napięciem i prądem. I teraz najważniejsze...
Na oporności, przez którą przepływa prąd w sposób nieunikniony występuje utrata energii. Na schemacie silnik jest symbolizowany dwoma elementami: rezystancją RO i indukcyjnością L. Płynie przez nie ten sam prąd, ale skutek przepływu prądu przez rezystancję jest zupełnie inny niż przez reaktancję. Prąd płynący przez uzwojenie silnika powoduje wydzielenie się mocy na tym uzwojeniu, co przejawia się wykonaniem pewnej użytecznej pracy mechanicznej (po to przecież stosujemy silnik). Niestety, część tej mocy jest tracona również na podwyższenie temperatury uzwojeń i obudowy.
No dobrze. Właściwie mamy to, o co chodzi – silnik wykonuje pracę, więc w czym nam przeszkadza reaktancja? Aby wirnik silnika mógł się obracać konieczne jest wytworzenie zmiennego pola magnetycznego. Prąd płynący przez uzwojenie (reaktancję indukcyjną) w ciągu jednego półokresu powoduje magnesowanie rdzenia. Zużywana jest do tego pewna energia, która jest jednak zwracana z powrotem do źródła w drugim półokresie prądu. Dlatego moc wynikającą z przepływu prądu przez reaktancję (w tym przypadku indukcyjną) nazywamy mocą bierną. Poza przemagnesowywaniem rdzenia, które samo w sobie nie jest nam do niczego potrzebne, nie mamy z niej żadnej korzyści. Można powiedzieć bilans wychodzi na zero, o co więc walka? Aby odpowiedzieć na to pytanie przekonajmy się naocznie, co dzieje się w obwodzie z rysunku 2.
Obliczenia
Na wstępie niezbędne założenia. Ze względów technicznych wartości elementów i parametry źródła zasilającego, które zastosujemy w eksperymencie nie odpowiadają tym, z którymi mamy do czynienia eksploatując rzeczywiste silniki. Musielibyśmy użyć cewek o bardzo dużych indukcyjnościach, a pomiary dużych prądów również nie ułatwiłyby nam pracy. W eksperymencie chodzi jedynie o pokazanie mechanizmu i zależności między poszczególnymi parametrami.
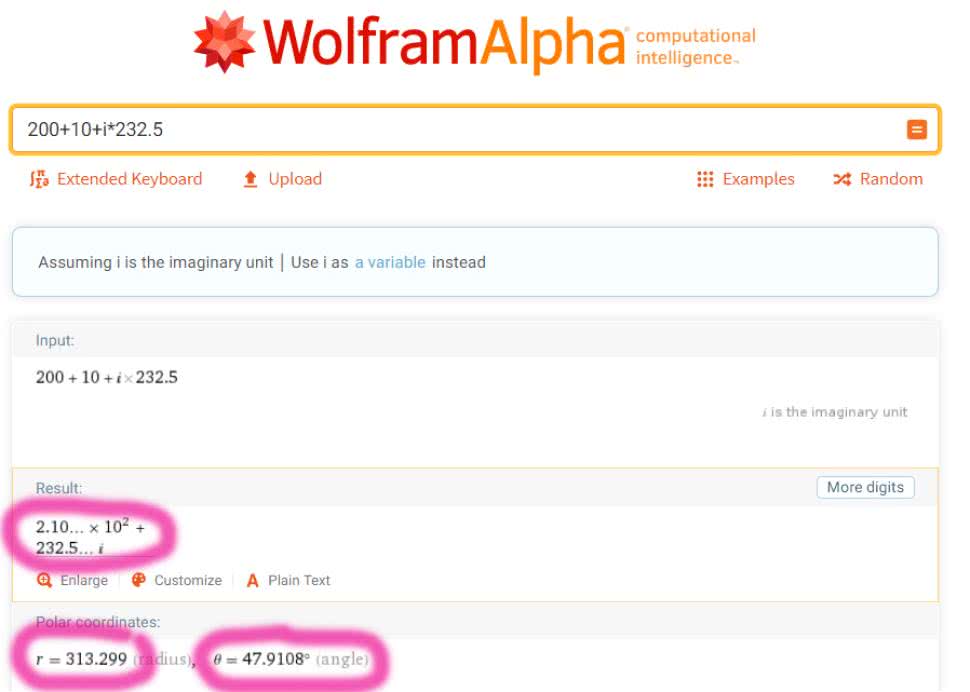
Zakładamy więc, że rezystancja linii jest równa 100 Ω, ale zaliczymy do niej również rezystor Rp1 10 Ω. Podobnie będzie z rezystancją cewki. Zakładamy, że ma ona oporność 200 Ω, ale tu również dodajemy rezystor pomiarowy Rp2 10 Ω. Do modelowania indukcyjności uzwojeń silnika zastosujemy dławik 1 mH. Przyjmiemy również parametry źródła zasilającego: E=1 VRMS, co odpowiada amplitudzie 1,4142 V. Dla wygody pomiarów przyjmiemy ponadto częstotliwość równą 37 kHz. Mamy wszystko, możemy przystąpić do obliczeń, ale musi się tu pojawić jeszcze jedno wyjaśnienie. Rozpatrujemy obwód prądu przemiennego, zatem obliczenia będą wykonywane na liczbach zespolonych. Nie jest to zadanie specjalnie trudne, ale dość uciążliwe. Istnieją wprawdzie kalkulatory, które potrafią liczyć bezpośrednio na liczbach zespolonych, zakładam jednak, że nie każdy Czytelnik jest posiadaczem takiego. Do obliczeń wykorzystamy ogólnie dostępny, darmowy i działający on-line program WolframAlpha uruchamiany spod adresu: http://bit.ly/2tKCZtx. Wyniki będą podawane z dokładnością do 4 cyfr znaczących, natomiast obliczenia wykonamy z pełną dokładnością programu. Jeszcze jedna ważna uwaga: w programie WolframAlfa jedność urojona jest oznaczana literką „i”, my natomiast jesteśmy przyzwyczajeni raczej do używania literki „j”. Pamiętajmy również o znaku dziesiętnym, którym w Wolframie jest kropka.
Zaczynamy od obliczenia impedancji odbiornika energii, czyli naszego silnika. Jak już wiemy składa się ona z rezystora RO i rezystora Rp2 oraz reaktancji XL. Reaktancja XL dla przyjętych parametrów źródła zasilającego jest równa:
impedancja silnika natomiast:
Zrzut ekranu ilustrujący to obliczenie w programie WolframAlfa pokazano na rysunku 4.
Impedancja całego obwodu wraz z linią zasilającą jest równa:
Prąd płynący w obwodzie ma natężenie:
Moc jest iloczynem prądu i napięcia. Do obliczenia zespolonej mocy pozornej w obwodzie prądu zmiennego musimy wziąć tzw. wartość sprzężoną prądu, czyli zmienić znak części urojonej prądu. Wartość sprzężoną oznacza się gwiazdką. Przyjmujemy to „na wiarę”, zainteresowanych dlaczego tak należy postąpić odsyłam do literatury lub samodzielnego wyprowadzenia wzorów. W naszym obwodzie całkowita moc pozorna pobierana ze źródła jest równa:
Do obliczenia liczby sprzężonej do danej liczby zespolonej używamy w Wolframie funkcji CONJUGATE. Na rysunku 5 pokazano obliczenie mocy pozornej. Należy zauważyć, że w polu wejściowym nie są wpisywane dane liczbowe z poprzednich obliczeń lecz formuła jest systematycznie rozbudowywana w kolejnych krokach obliczeniowych. Dzięki temu unikamy błędów zaokrągleń.
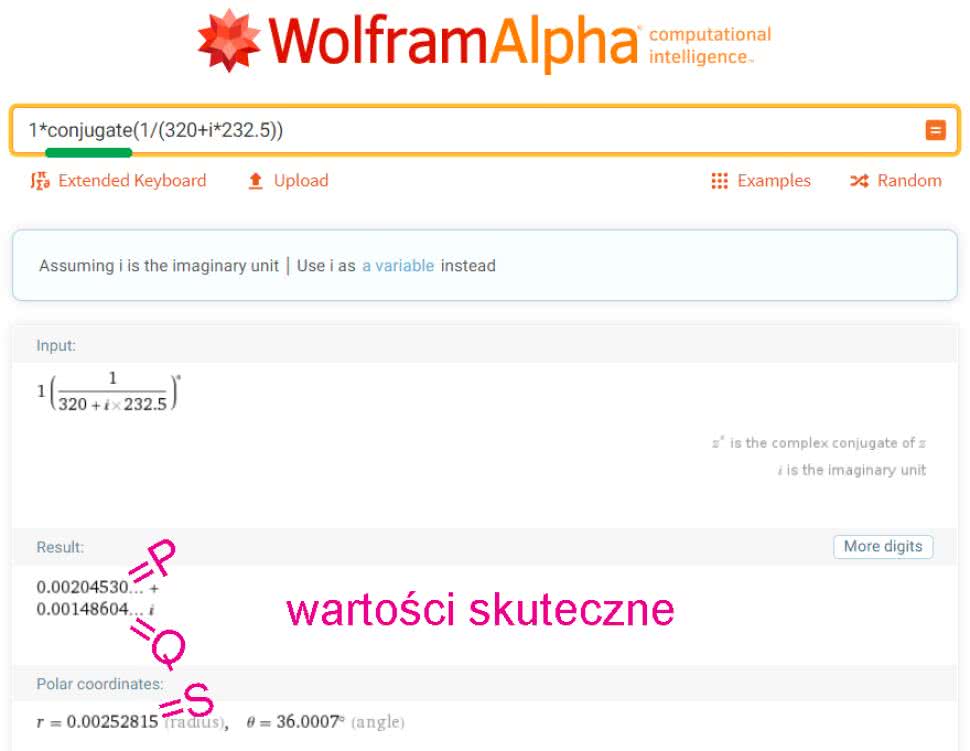
Całkowitej mocy czynnej i biernej nie musimy już dodatkowo liczyć. Moc czynna P jest równa części rzeczywistej mocy pozornej S, a moc bierna Q jest równa części urojonej. W naszym przypadku moc czynna wynosi więc P1=2,045 mW, a moc bierna Q1=1,486 mvar. Zauważmy, że moc bierna (urojona część mocy pozornej) ma znak dodatni. Oznacza to, że mamy do czynienia z mocą bierną indukcyjną. W obliczeniach uzyskaliśmy ponadto kąt przesunięcia fazowego równy 36,00°. W praktyce przesunięcie fazowe wnoszone przez dane urządzenie jest często podawane na tabliczce znamionowej jako cos(φ). Parametr ten jest nazywany współczynnikiem mocy. Kąt 36° nie odpowiada jednak parametrowi, który byłby podany na tabliczce naszego wirtualnego silnika, gdyż w powyższym obliczeniu uwzględniono rezystancję linii zasilającej. Dla samego silnika będzie on równy argumentowi impedancji Z1 równemu 47,91°. Współczynnik mocy silnika wyniesie więc: cos(φ)=0,6757. To bardzo słaby wynik. Biorąc pod uwagę warunki eksploatacji sieci zasilającej należy dążyć do obciążania jej odbiornikami o jak największej wartości cos(φ), co odpowiada odbiornikom czysto rezystancyjnym. Dlaczego tak jest przekonamy się po wykonaniu kolejnego etapu naszego eksperymentu. Policzmy jeszcze moce czynne (wartości skuteczne) wydzielane na rezystancjach RL i RO (bez rezystorów pomiarowych):
Wykres wskazowy mocy pokazano na rysunku 3b. Wykonajmy jeszcze jedno obliczenie, które da nam parametry mocy wskazywane przez mierniki użytkowników, czyli w punkcie C na schemacie. W tym celu należy obliczyć napięcie występujące w tym punkcie:
Moc pozorna zmierzona u użytkownika jest równa:
Gdyby więc użytkownik miał u siebie miernik mocy czynnej i biernej, wskazania byłyby następujące:
Duże przesunięcie fazowe jest spowodowane reaktancją indukcyjną silnika. Intuicyjnie czujemy, że do jej kompensacji należy zastosować element o przeciwnym charakterze, a więc kondensator. Reaktancja pojemnościowa ma przeciwny znak do reaktancji indukcyjnej, więc dołączenie kondensatora równolegle do silnika powinno spełnić zadanie. Modyfikujemy więc nasz obwód zgodnie z rysunkiem 6.
Zasadniczym zadaniem byłoby w tym przypadku obliczenie pojemności tak, aby zmniejszyć kąt przesunięcia fazowego do żądanej wartości. W artykule nie ma jednak zbyt dużo miejsca na takie obliczenia, pozostawiam je jako zadanie własne dla Czytelników, a my tymczasem skorzystamy z gotowego wyniku. Dołączamy pojemność 10 nF i patrzymy, jaki skutek osiągniemy. Reaktancja kondensatora jest równa:
Obliczamy impedancję silnika z równolegle dołączonym kondensatorem:
Całkowita impedancja obwodu jest równa:
W obwodzie popłynie prąd:
Całkowita moc pozorna pobierana ze źródła przez układ z kompensacją mocy biernej jest równa:
z czego wynika, że całkowita moc czynna jest równa P2=1,732 mW, a moc bierna Q2=0,02859 mvar. Policzmy jeszcze napięcie w punkcie C:
Na podstawie tego napięcia liczymy prąd cewki silnika:
Sprawdźmy, co zmierzą mierniki mocy u użytkownika. Moc pozorna:
I teraz uwaga! Chwila prawdy. Sprawdzamy mierniki mocy zainstalowane u użytkownika. Zmierzona na przyłączu użytkownika moc czynna po zastosowaniu kompensacji mocy biernej jest równa:
a moc bierna:
Cel został osiągnięty – moc bierna spadła niemal do zera, ale moc czynna nieznacznie, ale wzrosła z 1,342 mW do 1,402 mW. Pozostaje jeszcze obliczenie mocy wydzielanej w silniku i w przewodach linii zasilającej w układzie z kompensacją mocy biernej bez rezystorów pomiarowych:
Widzimy ponadto, że przesunięcie fazowe zostało zredukowane niemal do zera, dokładnie do φ=0,9457°, a więc współczynnik mocy osiągnął bardzo korzystną wartość: cos(φ)=0,9999.
Wnioski
Porównajmy teraz prądy i moce wydzielane w linii zasilającej. Prąd płynący w linii przed kompensacją był równy 2,53 mA i powodował straty mocy czynnej w linii 0,64 mW. To jest moc, która mówiąc dosadnie zupełnie niepotrzebnie idzie wyłącznie na ogrzewanie atmosfery (poprzez grzanie kabli linii zasilającej). Po kompensacji prąd zmalał do 1,73 mA, a straty mocy czynnej zmalały do 0,3 mW, to jest ponad 2-krotnie mniej niż w pierwszym układzie. Jednocześnie moc czynna wydzielana w silniku prawie się nie zmieniła (nieznacznie wzrosła). Widzimy wyraźnie, że jest o co walczyć. Żądania dostawców energii wobec jej przemysłowych użytkowników dotyczące obowiązku kompensowania mocy biernej nie są, jak widać, bezzasadne.
Symulacja
Sprawdźmy, jak zachowa się ten sam układ w symulacji programem LTspice. Ekran roboczy pokazano na rysunku 7.
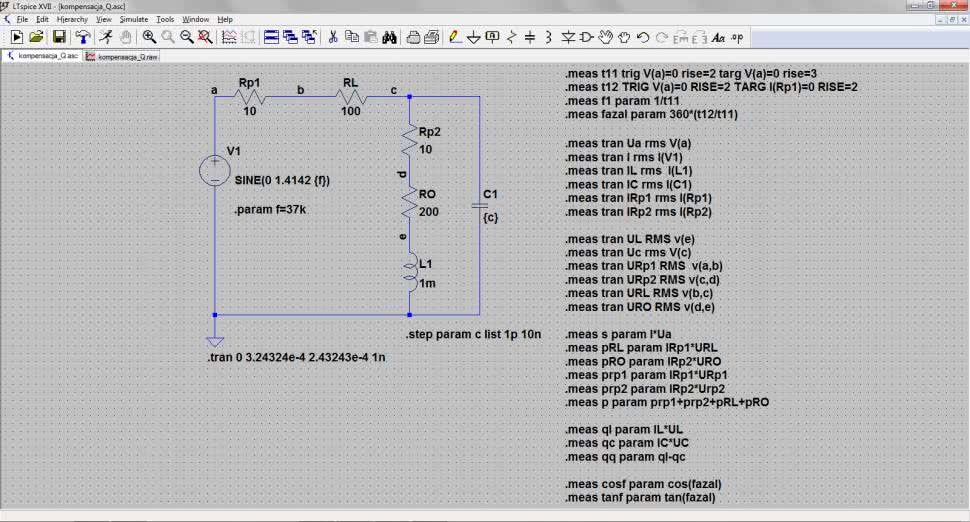
Widzimy na nim schemat badanego obwodu oraz zestaw instrukcji mierzących poszczególne parametry. W celu usprawnienia pracy wybrane węzły układu oznaczono symbolami literowymi od „a” do „e”. Źródło napięciowe ma amplitudę 1,4142 V, co odpowiada napięciu skutecznemu 1 V przyjętemu w obliczeniach. Przeprowadzimy symulację czasową (Transient) z takimi parametrami, aby na ekranie uzyskać dokładnie 3 okresy przebiegu. To, aby ekran obejmował dokładną wielokrotność okresów jest ważne ze względu na zasadę pomiaru wartości skutecznych (całkowanie za okres). Z kolei w przyjętej do pomiaru przesunięć fazowych metodzie konieczne jest dysponowanie co najmniej 3 okresami przebiegu.
Dodatkowo, aby uniknąć stanów nieustalonych „po włączeniu zasilania” analizujemy okresy od 9 do 11, co odpowiada ustawieniu parametrów: Stop time=3,243224e-4 s i Time to start saving data=2,44324e-4 s. Warto również zastosować mniejszy krok obliczeniowy niż domyślny, co zwiększy dokładność obliczeń. Ustawiamy więc Maximum Timestep na 1 ns.
Pojemność kondensatora kompensującego (C1) definiujemy parametrycznie. Dzięki temu będziemy mieli możliwość bezpośredniego porównania przebiegów i parametrów w układzie z kompensacją i bez niej. W programie LTspice nie można wprowadzać wartości równych zero lub nieskończoność, brak kondensatora będzie więc symulowany bardzo małą pojemnością, np. 1 pF. Kondensator kompensujący, tak jak w obliczeniach ma pojemność 10 nF. W polu wartości kondensatora C1 wpisujemy więc {C}, a na schemacie umieszczamy polecenie .step param c list 1p 10n.
Omówienia wymaga też zestaw instrukcji obliczeniowych MEAS. Za ich pomocą określimy wszystkie interesujące nas parametry obwodu. Najpierw występują instrukcje używane do pomiaru przesunięcia fazowego:
.meas t11 trig V(a)=0 rise=2 targ V(a)=0 rise=3
.meas t12 TRIG V(a)=0 RISE=2 TARG I(Rp1)=0 RISE=2
.meas f1 param 1/t11
.meas fazaI param 360*(t12/t11)
Pierwsza z nich uruchamia pomiar przedziału czasu t11 od chwili, gdy napięcie zasilające (węzeł „a”) po raz drugi przechodzi przez zero na zboczu narastającym do analogicznego trzeciego takiego przecięcia. Czas t11 odpowiada okresowi napięcia zasilającego. Druga instrukcja oblicza przedział czasu pomiędzy drugim przejściem napięcia zasilającego przez zero a drugim przejściem prądu przez zero na zboczach narastających (rysunek 8).
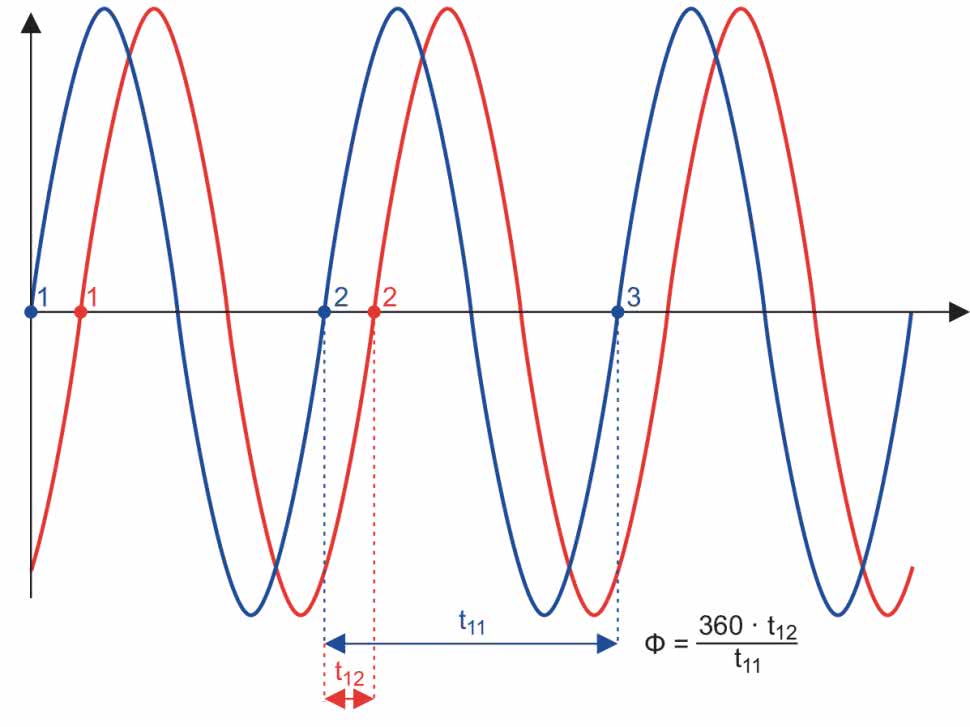
Jest to więc opóźnienie prądu względem napięcia wyrażone w jednostkach czasu. W kolejnych instrukcjach obliczana jest częstotliwość napięcia i przesunięcie fazowe wyrażone w stopniach kątowych.
W następnych instrukcjach mierzone są wartości skuteczne napięć w wybranych punktach obwodu i prądy płynące przez poszczególne elementy:
.meas tran Ua rms V(a)
.meas tran I rms I(V1)
.meas tran IL rms I(L1)
.meas tran IC rms I(C1)
.meas tran IRp1 rms I(Rp1)
.meas tran IRp2 rms I(Rp2)
.meas tran UL RMS v(e)
.meas tran Uc rms V(c)
.meas tran URp1 RMS v(a,b)
.meas tran URp2 RMS v(c,d)
.meas tran URL RMS v(b,c)
.meas tran URO RMS v(d,e)
Oraz blok najważniejszy, obejmujący instrukcje pomiaru mocy wydzielanych w poszczególnych elementach. Są to moce skuteczne:
.meas s param I*Ua
.meas su param I*Uc
.meas pRL param IRp1*URL
.meas pRO param IRp2*URO
.meas prp1 param IRp1*URp1
.meas prp2 param IRp2*Urp2
.meas p param prp1+prp2+pRL+pRO
.meas pu param prp2+pRO
.meas ql param IL*UL
.meas qc param IC*UC
.meas qq param ql-qc
Pozostaje jeszcze obliczenie współczynnika mocy i tangensa kąta przesunięcia fazowego, o którym będzie jeszcze mowa:
.meas cosf param cos(fazaI)
.meas tanf param tan(fazaI)
Po uruchomieniu symulacji trzeba wskazać punkt, dla którego będzie kreślony wykres czasowy. Ponieważ interesuje nas przesunięcie fazowe między napięciem zasilającym i prądem wskazujemy węzeł „a” i naprowadzamy kursor na przykład na rezystor Rp1. Kursor przyjmuje wówczas kształt prądowych cęgów pomiarowych, co oznacza że będzie mierzony prąd. Po kliknięciu, do wykresu napięcia zostają dołączone przebiegi prądowe.
I tutaj ważna uwaga: faza rysowanego prądu zależy od ustawienia elementu przez który ten prąd płynie (w naszym przypadki Rp1). Niestety podczas rysowania schematu nie mamy praktycznie żadnej informacji jak dany element powinien być zorientowany. Jeśli po pierwszym uruchomieniu symulacji faza danego przebiegu będzie ewidentnie odwrócona, należy obrócić element o 180°. Podpowiedzią może być strzałka na ikonie cęgów pomiarowych, o których była mowa, widoczna podczas wskazywania elementu, przez który przepływa prąd umieszczany na wykresie.
Aby zapewnić prawidłowe graficzne odwzorowanie relacji czasowych należy zadbać o ustawienie wykresów tak, aby ich osie czasu pokrywały się ze sobą. Może to wymagać korekty parametrów osi pionowej napięcia. Przykład pokazano w oknie dialogowym na wykresie z rysunku 9.
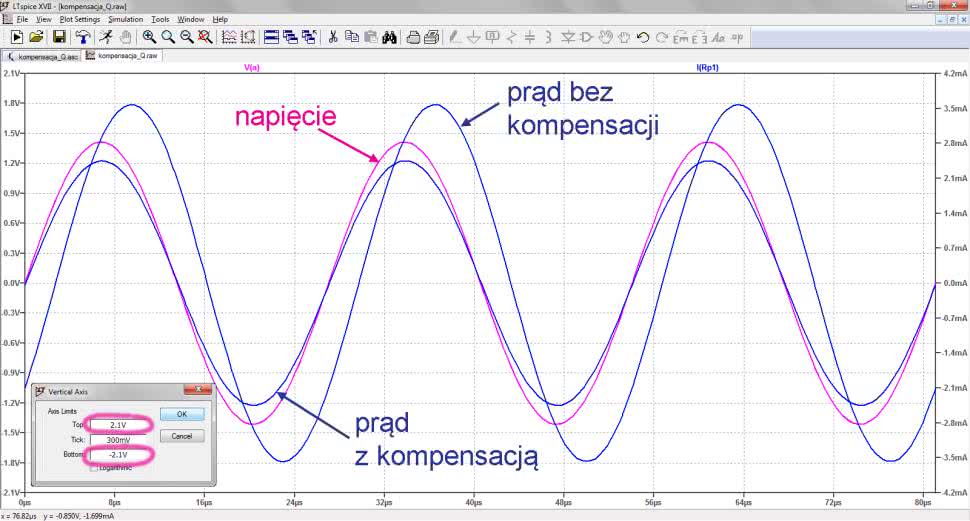
Nawet bez głębszej analizy, tylko na podstawie wykresów widać, że dołączenie kondensatora do naszego wirtualnego silnika zdecydowanie zmniejszyło przesunięcie fazowe między napięciem i prądem. O liczbowych parametrach kompensacji przekonamy się otwierając okno wyników pomiarów: View → SPACE Error Log. Wybrane fragmenty wyników przedstawiono na rysunku 10.
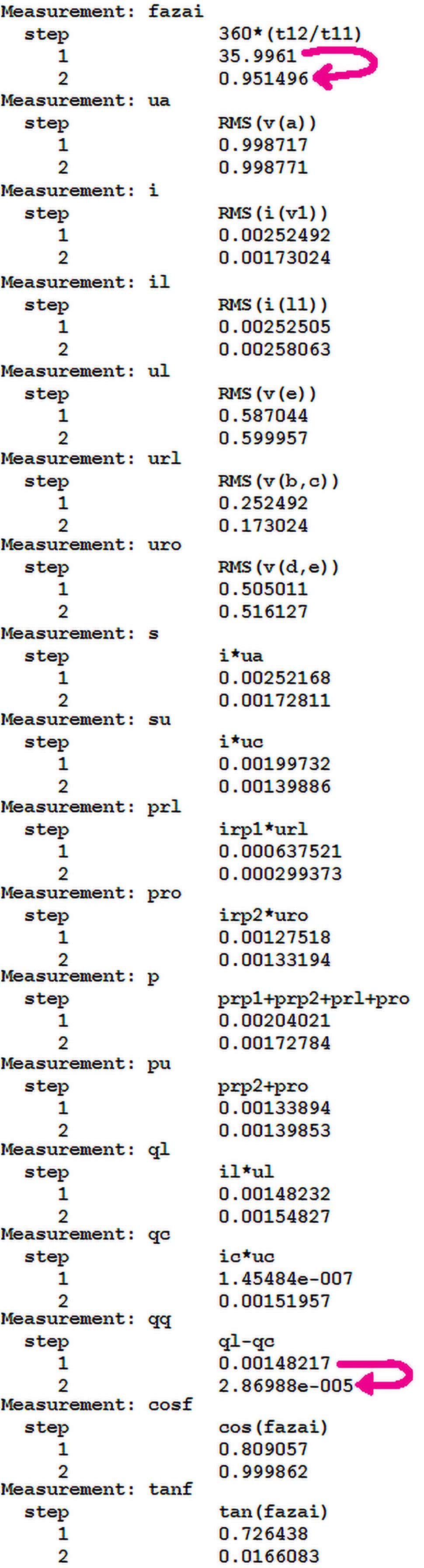
Spośród nich warto zwrócić uwagę na zmniejszenie kąta przesunięcia fazowego z 36° do 0,95° oraz redukcję wypadkowej mocy biernej z 1,48 mvar do 0,029 mvar. Symulacja potwierdziła również redukcję mocy czynnej wydzielanej na linii zasilającej z 0,64 mVA do 0,3 mVA. Wszystkie wyniki uzyskane tą metodą wykazują dużą zgodność z obliczeniami. Pora więc na weryfikację w układzie rzeczywistym.
Pomiary
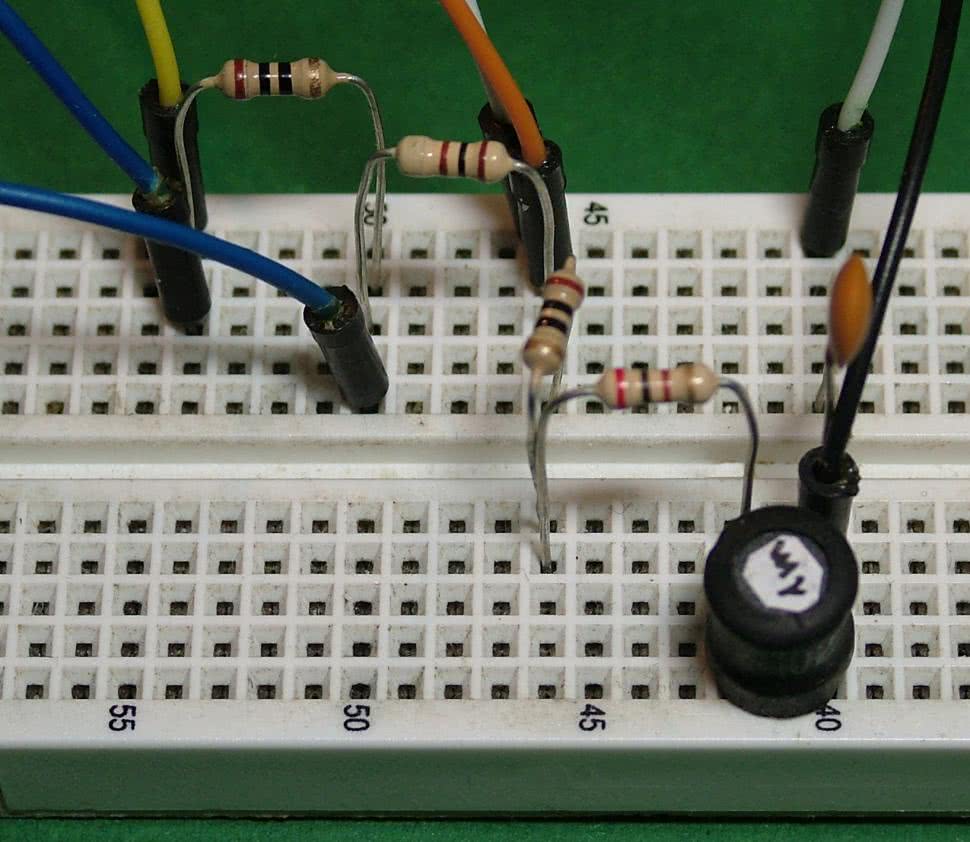
Jak zwykle układ montujemy na płytce stykowej (fotografia 11), a do pomiarów użyjemy zestawu Analog Discovery 2. Schemat połączeń przedstawiono na rysunku 12. Różnicowe wyprowadzenia 2 kanału pomiarowego łączymy z rezystorem Rp1, co umożliwi nam pomiar prądu.
Definiujemy więc kanał użytkownika, w którym będzie wyświetlana wartość C2/10 (napięcie 2 kanału dzielone przez rezystancję pomiarową 10 Ω dające w wyniku natężenie prądu). Po kliknięciu na trybik w oknie kanału zmieniamy domyślną nazwę (Name=prad). Do obliczenia wartości interesujących nas parametrów zastosujemy odpowiednio przygotowany skrypt, którego zawartość jest następująca:
function doScope(){
print(“Running Scope script”);
Scope1.run();
Wavegen1.run()
while(1){
if(!Scope1.wait()){
return;
}
var Urms =Scope1.Channel1.measure(“DC RMS”)
var pradI=Scope1.prad.measure(“DC RMS”)
var faza=Scope1.measure(“Phase”)
var cosfi=Math.cos(faza/180*PI)
var tanfi=Math.tan(faza/180*PI)
var mocS=pradI*Urms
var mocP=mocS*Math.cos(faza/180*PI)
var mocQ=mocS*Math.sin(faza/180*PI)
print(“I=”+pradI+” A faza=”+faza+”° cos(fi)=”+cosfi+” tg(fi)=”+tanfi)
print(“S=”+mocS+” VA P=”+mocP+” W Q=”+mocQ+” var”)
print()
wait(.4)
}
}
if(!(‘Scope1’ in this)){
throw(“Proszę uruchomic oscyloskop”);
}
doScope();
W pierwszym kroku uruchamiamy pomiar z odłączonym kondensatorem C. Podstawę czasu należy ustawić tak, aby ekran pomieścił pełne dwa okresy przebiegu. Dla częstotliwości 37 kHz, przy uwzględnieniu 10 działek ekranowych parametr Base jest równy
2/(10·37k)=5,4 μs. Wygodniejszą metodą może być ustawienie całkowitego czasu wyświetlanego na ekranie, równego 2/37k. Trzeba jednak niestandardowo ustawić interpretację parametru Base w oknie podstawy czasu. Należy w tym celu kliknąć na ikonę koła zębatego widoczną w prawym górnym rogu tego okna i wybrać opcję Range Mode → Full.
Uzyskany oscylogram przypomina ten z symulacji (rysunek 13a). Dokładny pomiar wykazuje jednak nieco większe przesunięcie fazowe niż to, które uzyskaliśmy w symulacji (36.0° – symulacja, 36,7° – pomiar). Różnice są jednak niewielkie, a mogą wynikać z nieuwzględnionej we wcześniejszych obliczeniach i symulacji rezystancji dławika, rezystancji połączeń na płytce stykowej, tolerancji użytych elementów itp.
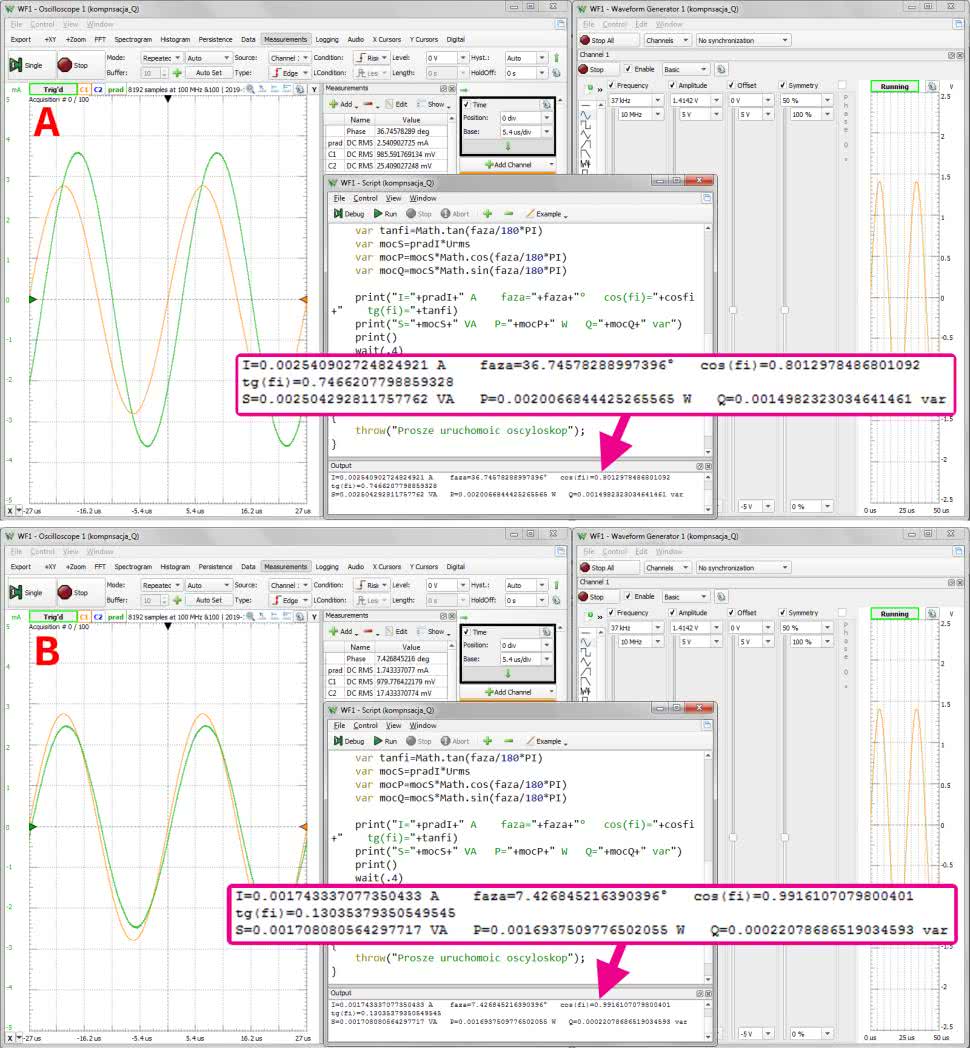
Z nieukrywanym dreszczykiem emocji uruchamiamy pomiar z dołączonym kondensatorem kompensującym. Wyniki przedstawiono na rysunku 13b.
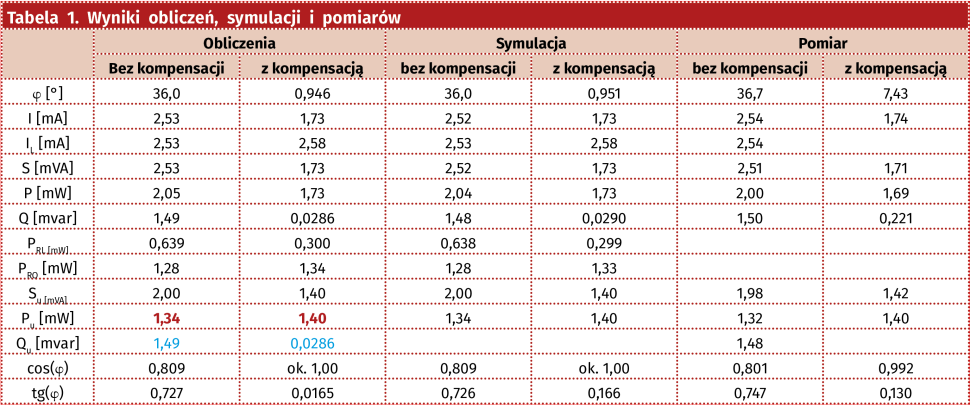
Odetchnęliśmy z ulgą, bo już na pierwszy rzut oka widać, że przesunięcie fazowe zostało zmniejszone, co oznacza, że kompensacja mocy biernej powidła się. Tak wspaniale, jak w obliczeniach i symulacji niestety nie jest. Przesunięcie fazowe spadło nie do 0,9° a do 7,4°, ale i tak oznacza to, że moc bierna spadła z 1,5 mvar do 0,22 mvar. Można jeszcze przełączyć 2 kanał oscyloskopu do rezystora Rp2 i 1 kanał dołączyć do punktu C na schemacie, aby zmierzyć prąd i moc wydzielaną w naszym wirtualnym silniku. Ten pomiar pozostawiam jednak zainteresowanym do samodzielnego wykonania. Wyniki wszystkich etapów eksperymentu zestawiono w tabeli 1.
Oszustom mówimy NIE!
Ta część artykułu wybiega poza tematykę cyklu, ale jest na tyle bulwersująca, że nie mogłem z niej zrezygnować.
W Internecie i innych mediach pojawiają się od czasu do czasu reklamy „rewelacyjnych” urządzeń, które mają redukować nasze koszty ponoszone za zużywaną domową energię elektryczną. Działają oczywiście na zasadzie kompensacji mocy biernej. Koszt takiego urządzenia to ok. 50 zł, ale deklarowana oszczędność to od 20% do 45% kosztów energii! O profesjonalizmie sprzedawców tego typu Bill kilerów czy innych Power saverów oraz determinacji w nabieraniu naiwnych klientów na haczyk świadczą hasła pojawiające się w opisach i reklamach, np.
- miernik mocy biernej (??? – a gdzie mamy wyniki),
- wyrównuje prąd w gniazdku (!!! – z sinusoidy robi prostą?),
- przedłuża żywotność urządzeń elektrycznych,
- szeroka kompatybilność do domu, biura, a nawet małej fabryki (trudno to skomentować),
- innowacyjna technologia (!!! w środku jest mostek prostowniczy składający się z czterech diod, dwa LED-y i oczywiście wielki kondensator),
- zmniejsza reaktywną część prądu (z czym niby ten prąd miałby reagować?).
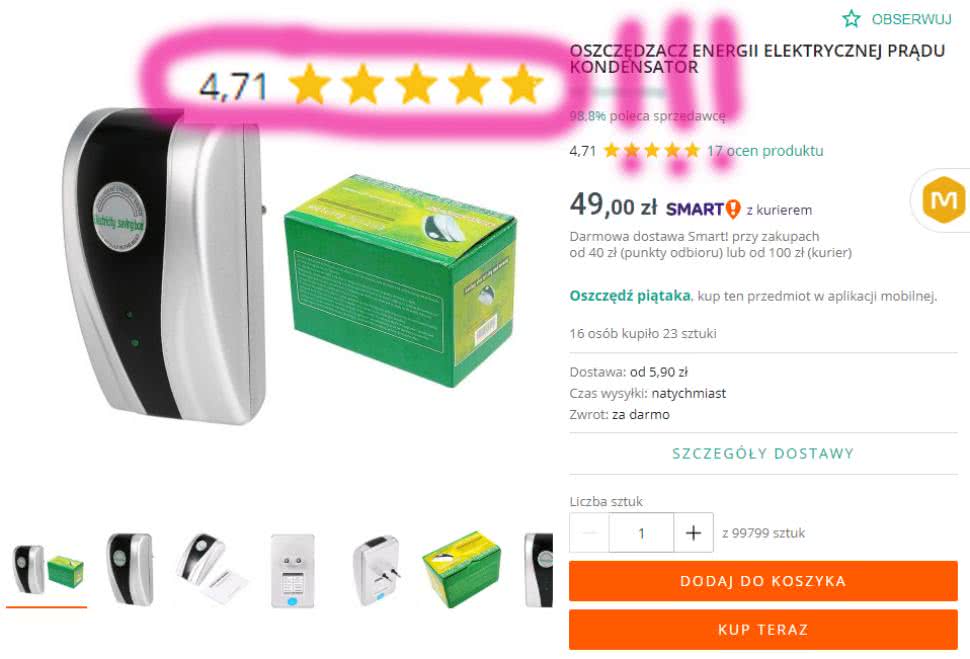
Pod tymi przechwałkami pojawiają się jeszcze tabele zawierające kalkulacje naszych korzyści. Liczby robią wrażenie. Kto patrzy na nie bezkrytycznie prawdopodobnie natychmiast otwiera internetową stronę aukcji (rysunek 14) i kupuje urządzenie póki jest w magazynie. Prestiżu sprzedawcy dodaje też średnia ocena aukcji 4,71 (na 5) i to że 16 osób kupiło 23 sztuki. To znaczy, że byli kupujący po kilka urządzeń!
Aby jeszcze bardziej uwiarygodnić hasła reklamowe, czasami dołączane są zdjęcia z pomiarów prądu pobieranego przez zestaw demonstracyjny bez Power Savera i z nim. Jest to bardzo efektowny chwyt stosowany z premedytacją przez sprzedawców, pokazujący wyraźne zmniejszenie natężenia prądu pobieranego przez odbiornik energii z dołączonym urządzeniem. Nie jest natomiast przypadkiem, że nie są pokazywane wskazania mierników mocy czy domowych liczników energii. Ci co kupują po kilka takich urządzeń nie wiedzą, że mierniki z filmików mierzą wartość skuteczną prądu, który zgodnie z naszymi obliczeniami, symulacją i pomiarami musi zmaleć po dołączeniu kondensatora do odbiornika indukcyjnego. Tak wynika z teorii.
Nabieranie ludzi ma dwa wymiary. Pierwszy to taki, że liczniki energii instalowane w domach mierzą moc czynną, nie bierną i nie pozorną. Użytkownicy indywidualni są rozliczani przez dostawców energii wyłącznie ze zużycia mocy czynnej. Tymczasem, gdy popatrzymy na wyniki obliczeń, okazuje się, że moc czynna mierzona u użytkownika może nawet nieznacznie wzrosnąć. W naszym układzie rezystancja linii zasilającej była względnie duża, stąd widoczna różnica wzrostu mocy czynnej odbiornika. Urządzenie Power Saver na pewno więc nie przyczyni się do redukcji kosztów, a co gorsza, może je wbrew oszukańczym hasłom reklamowym jedynie powiększyć.
Drugie oszustwo polega na tym, że rozliczenie mocy biernej obowiązuje jedynie zakłady przemysłowe i instytucje, które są do tego zobowiązane, a i to dopiero po przekroczeniu tangensa φ powyżej 0,4. Jednostki te instalują więc profesjonalne kompensatory mocy biernej, z akcentem na słowo profesjonalne. Chociaż w artykule skupiliśmy się na kompensacji mocy biernej indukcyjnej, to równie ważna jest kompensacja mocy biernej pojemnościowej. Kompensator profesjonalny musi dobierać elementy kompensujące według aktualnego charakteru pobieranej mocy.
Przełączane są w nim zarówno pojemności, jak i indukcyjności, tak aby nie przekompensować mocy. Zakłady energetyczne pobierają opłaty za przekraczanie limitów obu rodzajów mocy biernej (indukcyjnej i pojemnościowej). Power Saver jeśli już miałby coś kompensować, to tylko moc bierną indukcyjną, ale kilka pomiarów tego urządzenia pokazało, że po włączeniu go do gniazdka bardzo łatwo dochodzi do przekompensowania mocy, czyli pojawienia się mocy biernej pojemnościowej.
Pomiary „rewelacyjnego” Power Savera
Poświęcając się dla nauki zdobyłem owo wspaniałe urządzenie w celu przeprowadzenia kilku pomiarów. Odbiornikami był wentylator (odbiornik o charakterze prawie rezystancyjnym) i żarówka energooszczędna o wyraźnym charakterze indukcyjnym. Pomiary wykonano miernikiem mocy Yokogawa WT500.
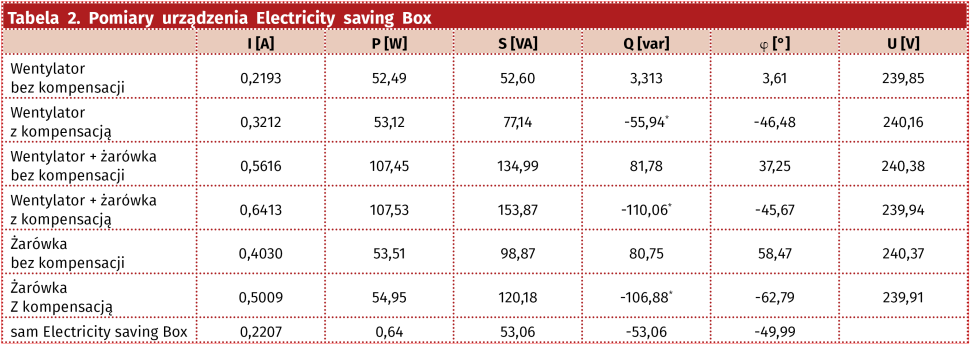
Już samo podłączenie Power Savera do gniazdka spowodowało pobór mocy czynnej ok. 0,6 W oraz mocy biernej –53,06 var świadczącej o zainstalowanym kondensatorze. Wyniki pomiarów zestawiono w tabeli 2. Potwierdzają one wszystkie dotychczasowe rozważania. Mamy do czynienia z bardzo brzydkim oszustwem.
Jarosław Doliński, EP