 Zaloguj
Zaloguj



Obrotomierz to w zasadzie miernik częstotliwości przeliczający liczbę zliczonych impulsów na obroty na sekundę lub obroty na minutę. Jeśli prędkość obrotowa jest bardzo mała, to można posłużyć się miernikiem okresu, który przeliczy czas zmierzony pomiędzy impulsami odebranymi z czujnika na prędkość obrotową wyrażoną we wspomnianych jednostkach. Co ważne, prędkość kątową mierzoną przez obrotomierz można łatwo zamienić na prędkość liniową, o ile tylko znamy obwód mierzonego obiektu, na przykład koła. Ta metoda pomiaru prędkości liniowej jest zwykle stosowana w rowerach, motocyklach i samochodach. Niestety, obrotomierz wyskalowany w jednostkach prędkości „nie wie”, jakiej średnicy naprawdę są nasze koła i jest to przyczyną, dla której wynik pomiaru prędkości jest fałszywy, jeśli nie zadbamy o odpowiednie ciśnienie powietrza w oponach.
O ile sam układ miernika częstotliwości jest typowy i w zasadzie jest powielany dobrze znany schemat, o tyle można spotkać się z różnymi rodzajami czujników. Wśród nich najczęściej stosowane są:
- optyczne szczelinowe, w których element świecący (najczęściej dioda LED) oraz światłoczuły (typowo – fototranzystor) są umieszczone naprzeciw siebie, ale w pewnej odległości. Wirujący obiekt ma jakiś „ząb” lub otwór zasłaniające/odsłaniające szczelinę pomiędzy nadajnikiem i odbiornikiem.
- optyczne refleksyjne, w których na wirującym obiekcie może być wykonana kontrastowa linia lub punkt, wykazujące się innym stopniem pochłaniania światła emitowanego przez otoczenie lub oświetlacz. Element światłoczuły wychwytuje odbite światło.
- magnetyczne, najczęściej wykonywane z użyciem niewielkiego magnesu mocowanego do wirującego obiektu i nieruchomego czujnika Halla lub cewki. zez mikrofon ultradźwiękowy.
Metod zamiany prędkości obrotowej na odpowiadającą mu częstotliwość jest wiele. Na przykład w automatyce używa się do tego celu czujników zbliżeniowych współpracujących z kołami zębatymi.
W latach, w których przeciętny elektronik wreszcie miał szansę sięgnąć po układy cyfrowe TTL jak grzyby po deszczu wyrastały projekty bazujących na nich urządzeń. Na punkcie honoru każdego elektronika, obojętnie hobbysty czy profesjonalisty, było zbudowanie zegara, miernika częstotliwości i pozytywki. Ci bardziej zamożni lub po prostu mający na podorędziu jakąś giełdę elektroniczną wykonywali też woltomierze i multimetry na bazie specjalizowanych układów scalonych firmy Intersil. W latach dziewięćdziesiątych mikrokontrolery i mikroprocesory nie były aż tak popularne, jak współcześnie, ponieważ mało kogo było stać na narzędzia i typowo towarzyszące ich aplikacjom układy pamięci. Dlatego większość wymienionych urządzeń budowało się „na piechotę”, składając poszczególne bloki funkcjonalne z elementów dyskretnych. Na przykład, generator częstotliwości wzorcowej z bramek UCY7400, licznik dekadowy z układów UCY7490, dekoder liczby binarnej na kod wyświetlacza 7-segmentowego z układów UCT7447 itp. Używało się też metod pośrednich, na przykład przetworników częstotliwość/napięcie wykonanych na bazie diod, kondensatorów i/lub wzmacniaczy operacyjnych – dzięki nim odpowiednio wyskalowany woltomierz mógł służyć do pomiaru częstotliwości lub okresu (takie przetworniki f/U były też często wbudowywane w lepszej klasy mierniki analogowe).
Opisane wyżej trendy są widoczne również w projektach publikowanych na łamach Elektroniki Praktycznej. Rzućmy na przykład okiem na „Obrotomierz z czujnikiem optycznym” (AVT-842) z EP 1/1999 oraz „Obrotomierz” z czujnikiem refleksyjnym (AVT-5260) z EP 10/2010. Oba te urządzenia dzieli „niespełna” 11 lat, ale mimo tego już można dostrzec rodzący się trend: starszy wykonano z użyciem specjalizowanego układu scalonego, a nowszy z zastosowaniem mikrokontrolera.
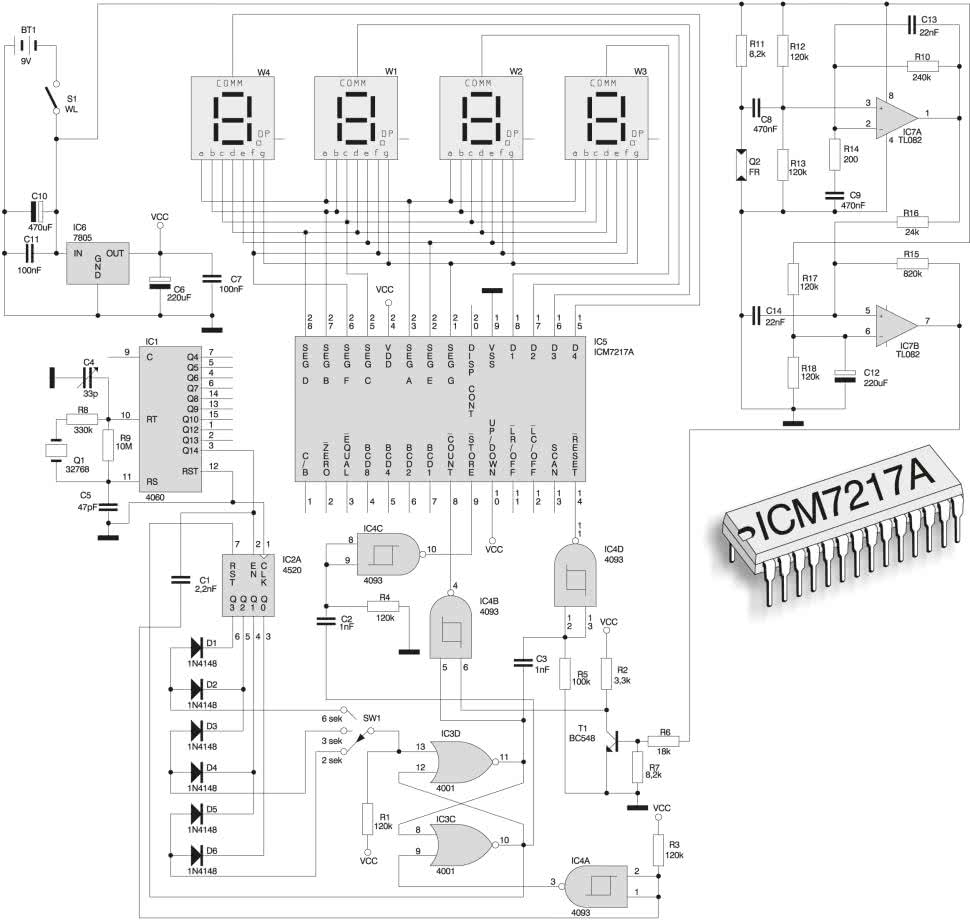
Schemat ideowy obrotomierza z EP 1/1999 pokazano na rysunku 1. Dzięki zastosowaniu specjalizowanego układu scalonego ICM7217 firmy Harris układ elektryczny jest wyjątkowo nieskomplikowany, a jego wykonanie nie przedstawiało problemu nawet dla mało zaawansowanego hobbysty. Ponadto autor artykułu podkreśla, o czym wspomniałem na początku, że pomimo nazwy „obrotomierz” w istocie buduje się zwykły miernik częstotliwości, tylko przystosowany do pomiaru stosunkowo wolnych przebiegów i wyposażony w nietypowe wejście. Jak wspomniano, sercem przyrządu jest układ ICM7217AIPI firmy Harris, który jest 4-cyfrowym licznikiem uniwersalnym z ustawianym rejestrem, którego zawartość może być stale porównywana ze stanem licznika. Układ może bezpośrednio sterować 7-segmentowymi wyświetlaczami LED za pomocą multipleksowania. Może też pracować bez dodatkowych komponentów zewnętrznych, ponieważ ma wbudowany oscylator. Schemat ideowy urządzenia wyraźnie jest podzielony na część analogową i cyfrową. Światło o zmiennym natężeniu, odbite od wirującego przedmiotu pada na fototranzystor Q2 wytwarzający zmienne poziomy napięcia, wzmacniane przez za pomocą układu wzmacniacza operacyjnego IC7A.

Z jego wyjścia impulsy są kierowane na wejście kolejnego wzmacniacza operacyjnego IC7B, pracującego jako komparator napięcia. Na jego wyjściu otrzymujemy przebieg zbliżony do prostokątnego, który za pośrednictwem rezystora R6 steruje bazą tranzystora T1. Ten tranzystor pełni funkcję konwertera poziomu napięcia, ponieważ oba wzmacniacze są zasilane napięciem 9 V DC, natomiast część cyfrowa akceptuje napięcie 5 V lub mniejsze. Z kolektora tranzystora T1 impulsy są kierowane do jednego z wejść bramki pomiarowej IC4D. Generator oraz dzielnik wstępny wykonano z użyciem układu 4060. Zastosowano też bardzo tani i ogólnie dostępny kwarc „zegarkowy” o częstotliwości rezonansowej 32768 Hz. Po podzieleniu przez 214 na wyjściu Q14 licznika IC1 otrzymujemy przebieg o częstotliwości 2 Hz. Potrzebne są nam czasy bramkowania równe 6, 3 i 2 s, częstotliwość ta ulega kolejnemu podziałowi w liczniku binarnym IC2A. Przerzutnik R-S zbudowany z bramek NOR IC3D i IC3C steruje bramkowaniem nadchodzących z wejścia impulsów, zerowaniem licznika IC5 oraz wyświetlaniem wyników pomiaru.
Na rysunku 2 pokazano schemat ideowy obrotomierza z EP 10/2010. Zbudowano go przy użyciu taniego mikrokontrolera ATtiny2313, 4-cyfrowego wyświetlacza LED ze wspólną anodą, tranzystorów PNP sterujących pracą i czujnika odbiciowego QRD1114. Sterowanie pracą wyświetlacza odbywa się z wykorzystaniem multipleksowania realizowanego w pętli głównej programu obsługi obrotomierza. Wspólne anody poszczególnych wyświetlaczy sterowane są za pomocą kluczy tranzystorowych T1...T4. Katody przyłączone są do portu PORTB mikrokontrolera przez rezystory R6...R13 ograniczające prąd segmentów. Do taktowania mikrokontrolera zastosowano oscylator z rezonatorem kwarcowym o częstotliwości 4,194304 MHz, co wynika przede wszystkim z potrzeby odmierzania dokładnie 1-sekundowych odcinków czasu, w których są zliczane impulsy z fototranzystora za pomocą 8-bitowego układu czasowo-licznikowego Timer1. Mikrokontroler jest taktowany sygnałem o częstotliwości 262144 Hz otrzymanym w wyniku podziału częstotliwości oscylatora kwarcowego przez wewnętrzny preskaler. Zmniejszenie częstotliwości sygnału taktującego mikrokontroler ma na celu przede wszystkim umożliwienie generowania przerwania po przepełnieniu układu Timer0 dokładnie co 1 sekundę.
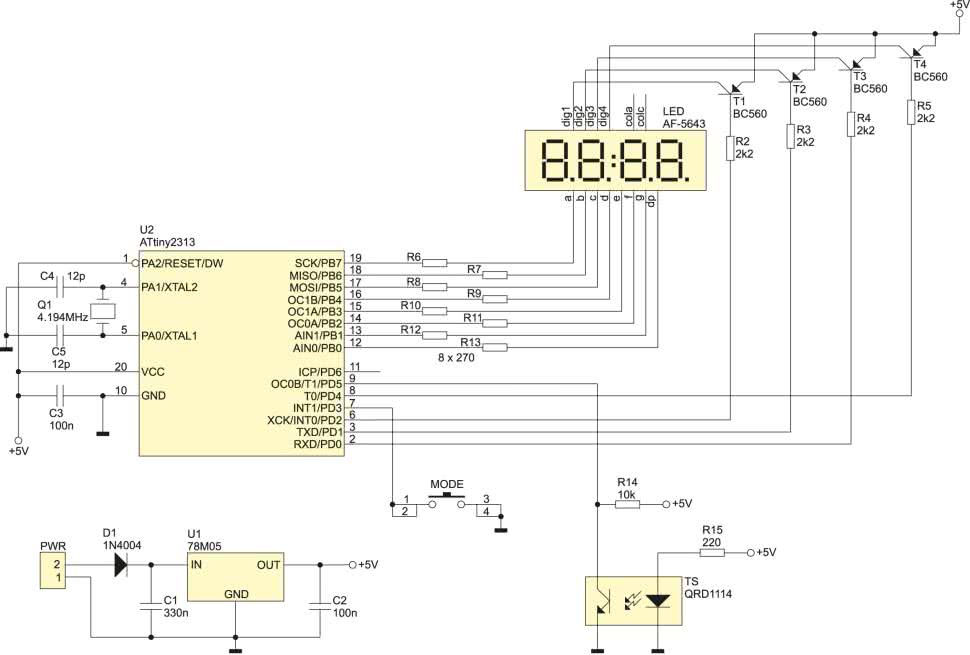
Licznik 8-bitowy układu Timer0 zlicza impulsy przebiegu prostokątnego o częstotliwości 256 Hz, w związku z czym dokładnie co 1 sekundę następuje jego przepełnienie i zostaje wygenerowane żądania obsługi przerwania, które jest również odpowiedzialne za przechwytywanie zawartości licznika układu Timer1, pracującego w trybie licznika impulsów zewnętrznych na wyprowadzeniu T1 mikrokontrolera. Na tym wyprowadzeniu występuje przebieg generowany przez czujnik odbiciowy QRD1114. W ten sposób otrzymujemy układ umożliwiający zmierzenie częstotliwości przebiegu występującego na wyprowadzeniu T1 mikrokontrolera, a zatem obliczenie prędkości obrotowej wału.
Po naciśnięciu przycisku MODE obrotomierza można wybrać jednostkę wyniku pomiaru, w której jest on prezentowany. Dostępne jednostki to: obr/min (domyślna) i obr/sek. Włączenie ostatniej opcji sygnalizowane jest za pomocą kropki dziesiętnej najmniej znaczącej cyfry jednostek.
Jacek Bogusz, EP












