Zaloguj
Zaloguj




Urządzenia elektroniczne wydzielają ciepło. Zjawisko to jest oczywiste dla każdego elektronika (i nie tylko). W wielu przypadkach konieczność zapewnienia chłodzenia komponentom półprzewodnikowym jest oczywistością. Jednak gdy zaczynamy szczegółowo analizować to zagadnienie to staje się ono bardzo problematyczne. Co w istocie oznacza, że „układ się grzeje”? Od czego jest zależne nagrzewanie się elementów? W jaki sposób ciepło przenika przez cały nasz system i jak pozbyć się go z urządzenia? Odpowiedzi na te, pozornie proste pytania, nie są wcale łatwe, gdy oczekujemy określenia konkretnych parametrów. Pierwsze – jakościowe spojrzenie na problem już może niejednego przyprawić o ból głowy, ale to dopiero ilościowe podejście da realne odpowiedzi na pytania projektowe.
W tym artykule przyjrzymy się teorii, stojącej za przepływem ciepła, szczególnie w urządzeniach elektronicznych. Omówimy zjawiska takie jak ciepło i jego przepływ oraz pojemność cieplna, rezystancja cieplna itp. Zaprezentowana elektryczna analogia przepływu ciepła pozwoli zastosować narzędzia przeznaczone do symulacji elektrycznych do modelowania zjawisk termicznych. Oprogramowanie SPICE idealnie nadaje się do tego celu. Przykłady, omówione dalej, zostały zrealizowane w LTspice, darmowym oprogramowaniu bazującym na SPICE, opracowanym przez firmę Linear Technology (obecnie wykupioną przez Analog Devices).
Podstawowe pojęcia
Aby w precyzyjny sposób mówić o tematyce ciepła w elektronice, konieczne jest ustalenie definicji pewnych kluczowych pojęć. Ścisłe zdefiniowanie tych elementów pozwoli nam łatwo zrozumieć zależności pomiędzy nimi oraz elektryczną analogię, omówioną w dalszej części artykułu.
Ciepło to, w dużym uproszczeniu, ilość energii przekazywanej pomiędzy ciałami. Energia przekazywana może być, jako praca (np. praca mechaniczna) lub właśnie ciepło. Ciepło może być przekazywane na trzy sposoby:
- Poprzez przewodzenie cieplne, które wymaga bezpośredniego kontaktu dwóch ciał, wymieniających energię cieplną;
- Poprzez konwekcję, czyli przez makroskopowy ruch medium, przenoszącego energię. Medium tym w systemach chłodzących będzie zwykle poruszające się powietrze;
- Poprzez promieniowanie – każde rozgrzane ciało (czyli takie, którego temperatura ma wartość powyżej zera absolutnego) emituję promieniowanie elektromagnetyczne o widmie uzależnionym od temperatury ciała.
Temperatura jest miarą energii, jaką ma jakieś ciało. Ściślej rzecz biorąc jest to średnia energia kinetyczna atomów, tworzących dane ciało. Każdy atom o temperaturze powyżej zera bezwzględnego porusza się lub drga, zależnie od stanu skupienia i innych warunków środowiskowych.
Moc to skalarna wielkość fizyczna, która określa ilość pracy – przekazywanej energii, w jednostce czasu. Jednostką mocy jest wat – W. Elektrycznie moc P to iloczyn natężenia prądu I, który przepływa pomiędzy punktami o różnych potencjałach, oraz napięcia elektrycznego U występującego pomiędzy tymi punktami:
P = I × U
Istnieją dwie stałe materiałowe, które są kluczowe dla przeprowadzania analiz termicznych – rezystancja termiczna i pojemność cieplna. Opór cieplny jest kluczową właściwością termiczną materiału i miarą różnicy temperatur, przy określonym przepływie ciepła. Rezystancja cieplna jest odwrotnością przewodności cieplnej. Ściśle rzecz biorąc rezystancja cieplna Rth to iloraz różnicy temperatur pomiędzy punktami ΔT i przekazywanej pomiędzy nimi mocy P. Rezystancję cieplną wyraża się w Kelwinach (lub stopniach Celsjusza) na Wat.
Rezystancja cieplna może być wyrażana na wiele sposobów. Bezwzględna rezystancja cieplna to wartość charakteryzująca konkretny element (np. element elektroniczny). Dla materiałów podaje się na ogół przewodność cieplną właściwą. To parametr charakteryzujący materiał – z tej wartości oraz parametrów mechanicznych można wyznaczyć bezwzględną rezystancję cieplną dla danego elementu (np. radiatora czy innego elementu, przeznaczonego do transportu czy rozpraszania ciepła).
Aby wyznaczyć rezystancję cieplną z właściwej przewodności cieplnej materiału i jego geometrii należy w pierwszej kolejności wyznaczyć pole powierzchni A, przez którą płynie ciepło, a następnie odległość t, jaką ma ono do pokonania w materiale (na ogół jest to jego grubość). W takiej sytuacji rezystancja cieplna elementu wynosi:

gdzie λ to przewodność cieplna właściwa danego materiału.
Na przykład, jeśli chcemy obliczyć przewodność cieplną przekładki termicznej, mocowanej np. na tranzystorze, to uwzględniamy jej pole powierzchni (w przypadku elementu w obudowie TO-220 jest to 10,16×15,1 mm=153,416 mm2), a następnie jej grubość, np. 0,2 mm. Przewodność cieplna podkładki silikonowej firmy 3M wynosi 1,6 W/(m×K) (dla typu 3M 5514). Rezystancja cieplna tej podkładki wynosi, zatem:

Pojemność cieplna to zdolność ciała do gromadzenia ciepła w swojej objętości. Definiuje się ją, jako ilość ciepła, jaką trzeba dostarczyć do danego ciała, aby podnieść jego temperaturę o jeden stopień. Wyraża się ją w dżulach na Kelwin (J/K). To znaczy, że do ciała o pojemności cieplnej 1000 J/K trzeba dostarczyć 1000 J, by podnieść jego temperaturę o 1 K. Wartością pochodną jest ciepło właściwe (Cp), czyli masowa właściwa pojemność cieplna – stała materiałowa, mówiąca o pojemności cieplnej danego materiału w przeliczeniu na jednostkę wagi. Typowo ciepło właściwe podawane w J/(kg×K) i służy do wyznaczania pojemności cieplnej modelowanych elementów. Na przykład, jeśli zastosowano aluminiowy radiator (Cp=1029 J/(kg×K)) o masie 200 g, to możemy wyznaczyć jego pojemność cieplną – wynosi ona 206 J/K. Zatem dostarczenie 206 dżuli ciepła do tego elementu podniesie jego temperaturę o 1 K.
Wszystkie te wartości można połączyć na gruncie termodynamiki, jednak można również skorzystać z faktu, że analogiczne równania można zrealizować z użyciem obliczeń elektrycznych. Elektryczna analogia termodynamiki pozwoli nam, elektronikom, lepiej zrozumieć wszystkie zależności, a także wykorzystać do modelowania oprogramowanie, które służy do symulacji układów elektronicznych.
Elektryczna analogia termodynamiki
W elektrycznej analogii obliczeń termicznych rezystancja i pojemność cieplna pozostaje odpowiednio rezystancją i pojemnością (czyli opornikiem i kondensatorem w systemie do symulacji). Możemy teraz wyjść z tego założenia, aby zidentyfikować pozostałe analogie.
W układzie elektrycznym, gdy przez opornik o rezystancji R płynie prąd I spadek napięcia U na nim jest równy:
U = I × R
Analogicznie, jeśli do elementu o rezystancji cieplnej Rth przyłożymy moc P, to temperatura T na drugim końcu tego elementu podniesie się o:
ΔT = P × Rth
Elektryczna analogia jest tutaj w pełni czytelna. Ściślej rzecz biorąc, analogiem przepływu energii – mocy, jest prąd elektryczny. Napięcie jest analogiem różnicy temperatur, co ma ogromny sens, gdyż napięcie elektryczne jest, fizycznie, różnicą potencjałów elektrycznych (nie możemy mierzyć napięcia w punkcie, mierzymy je zawsze pomiędzy dwoma punktami – domyślnie jednym z nich jest na ogół masa, ale nie zawsze musi tak być).
Elektryczna analogia dla układów termodynamicznych ma także inne implikacje. Pozwala nam to w prosty sposób wyznaczać rezystancje czy pojemności cieplne nawet skomplikowanych systemów, ponieważ rezystancje i pojemności termiczne sumują się tak samo, jak elektryczne, zależnie od sposobu połączenia – szeregowo bądź równolegle. Jest to istotne, gdyż rzeczywiste, fizyczne systemy, niemal zawsze są układem szeregowo i równolegle połączonych idealnych elementów. Aby uniknąć konieczności manualnego obliczania sum równolegle i szeregowo połączonych elementów w układzie użyjemy odpowiedniego oprogramowania.
Symulacje SPICE
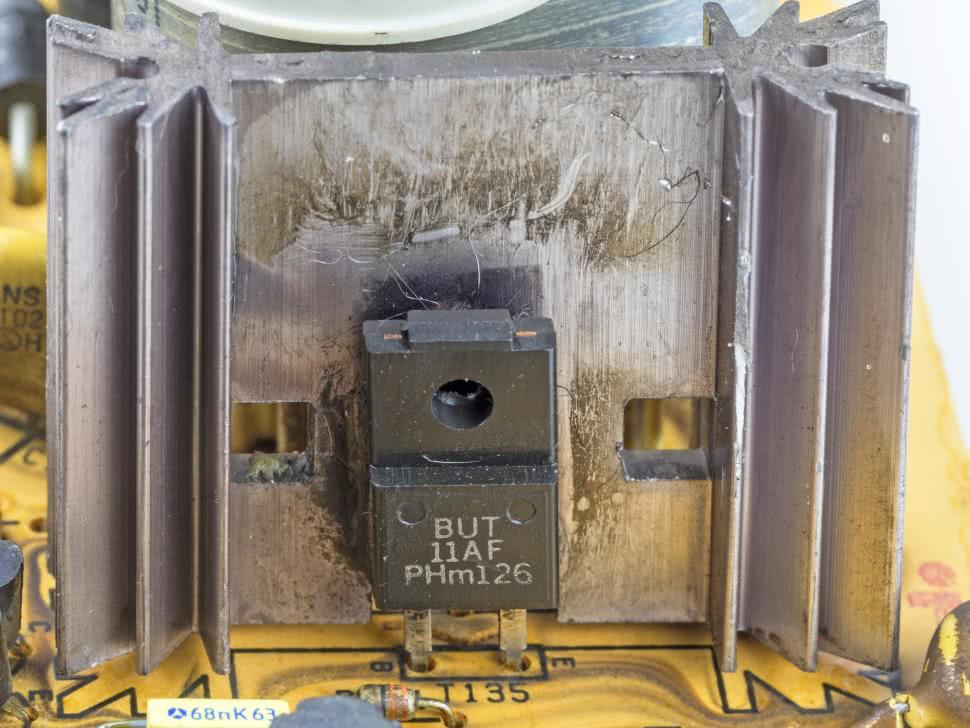
Sposób planowania symulacji najprościej jest zrozumieć, jeśli zobrazujemy go na przykładzie. Aby nie komplikować pierwszego przykładu, weźmy system pokazany na fotografii 1. Widzimy tam tranzystor w obudowie TO-220, wlutowany w płytkę drukowaną, wyposażony w radiator, celem poprawy chłodzenia. Załóżmy, że napięcie kolektor-emiter (lub źródło-dren dla tranzystora polowego) oraz prąd kolektora (drenu) są stałe w czasie.
Scenariusz stacjonarny
Skoro spadek napięcia na elemencie Utran i prąd przez niego płynący Itran są stałe w czasie, to będą one produkować stałą w czasie moc cieplną Pth.
Pth = Itran × Utran
Jak pisaliśmy wyżej, produkowana moc, przenoszona jako ciepło, to w elektrycznej analogii płynący prąd. Dlatego też tranzystor ten, jako źródło ciepła, modelujemy, jako źródło prądowe. Załóżmy, że spadek napięcia na tranzystorze wynosi 0,6 V, a płynie przez niego prąd równy 4 A, co daje Pth=2,4 W.
Kolejny krok wymaga zastanowienia się, którędy ciepło wydostaje się ze struktury krzemowej i przedostaje do otoczenia. W pierwszej kolejności ciepło musi przeniknąć ze struktury krzemowej (zwanej zwyczajowo złączem) do wierzchniej powierzchni obudowy.
Na drodze stoi rezystancja cieplna złącze-obudowa RθJC, która dla pokazanego na fotografii 1 tranzystora wynosi 3,125°C/W. Następnie ciepło to jest rozpraszane z obudowy. Część obudowy wystawiona jest na powietrze, które chłodzi tranzystor konwekcyjnie.
Rezystancja cieplna obudowa-ambient RθCA dla obudowy TO-220 wynosi typowo 70°C/W. Druga część tranzystora zamontowana jest na radiatorze. Typowo stosuje się izolujące przekładki dla tego rodzaju elementów. We wcześniejszej części artykułu obliczaliśmy rezystancję cieplną takiej przekładki (Rs) – dla zadanego przykładu wynosi ona 0,81°C/W. To zapewnia nam kontakt z radiatorem.
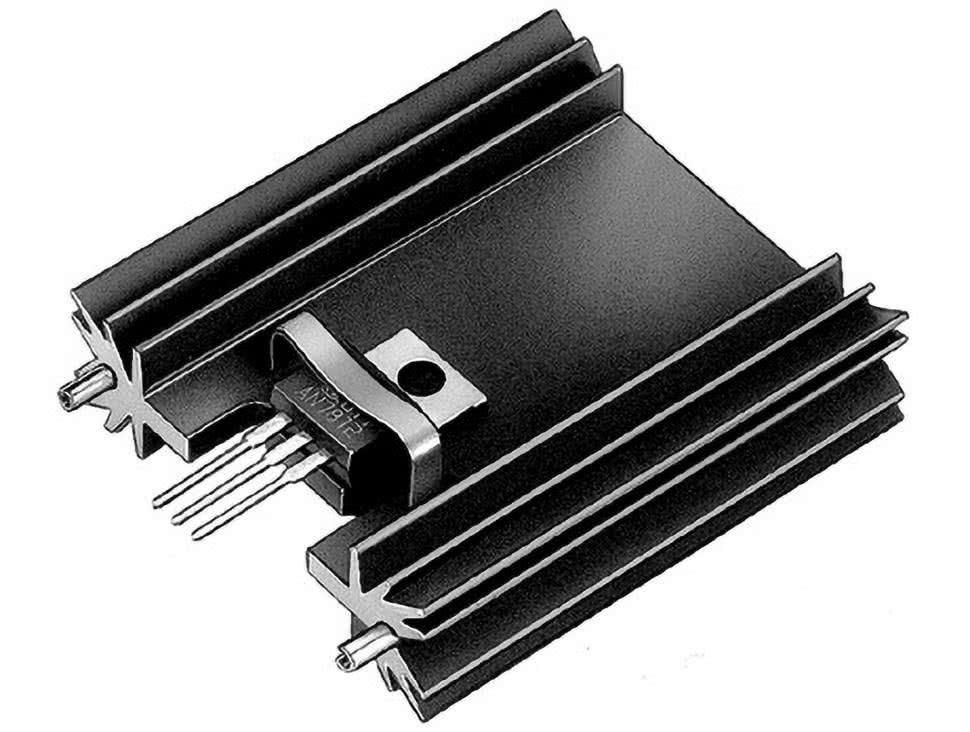
Rezystancja termiczna radiatora RHS podobnego do tego z przykładu (Fischer Elektronik SK 409/38,1 STS, rysunek 1) wynosi 7°C/W. Temperatura (Tamb) otoczenia wynosi 25°C. Jak pamiętamy, analogią temperatury jest napięcie. Kluczowe jest dodanie tej temperatury we wszystkich miejscach, które znajdują się w temperaturze otoczenia.
Jeśli teraz umieścimy te elementy w modelu w LTspice, otrzymamy schemat taki, jak pokazany na rysunku 2.
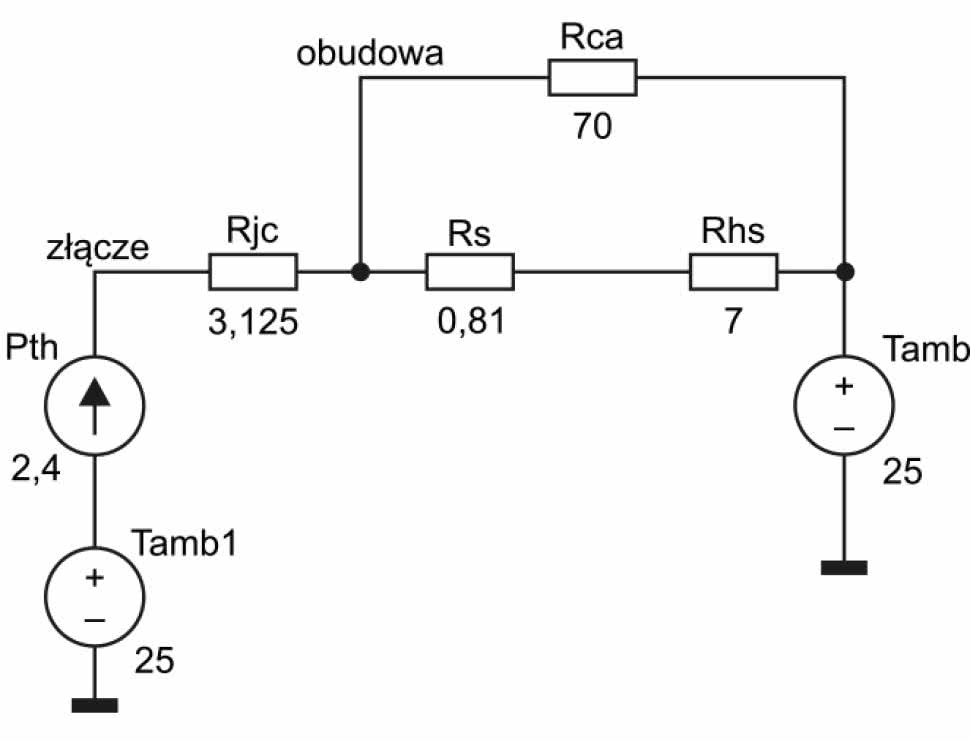
Łączy on w sobie wszystkie elementy opisane powyżej i umieszcza system w temperaturze otoczenia. Do symulacji, jako że jest to układ stacjonarny, wystarczy nam dyrektywa .op do znalezienia stacjonarnego punktu pracy układu. Generalnie układ ten znajduje się w czasie pracy w stanie stacjonarnym – w stanie równowagi termodynamicznej. Wyniki symulacji dla punktu pracy układu DC podawane są w tekstowej tabeli. To, co nas interesuje, to napięcia w oznaczonych punktach (złącze, obudowa, radiator):
--- Operating Point ---
V(złącze): 49.33626 voltage
V(obudowa): 41.88626 voltage
V(radiator): 40.11137 voltage
Interpretacja tych wartości jest bardzo prosta – to temperatury, jakie osiągną poszczególne elementy. Z projektowego punktu widzenia najistotniejsza jest temperatura złącza tranzystora, która nie może przekroczyć określonej w karcie katalogowej temperatury granicznej. Dla BUT11 jest to 150°C, więc znacznie powyżej osiąganej temperatury. Jeśli jednak zwiększymy moc traconą na tranzystorze pięciokrotnie, do 12 W, temperatura złącza osiągnie 147°C. Aby dalej zwiększać moc należałoby zredukować rezystancję cieplną, zmieniając radiator. Jest to jednak nadal układ liniowy. Co gdybyśmy chcieli sterować obciążeniem impulsowo (np. za pomocą impulsów o zmiennym wypełnieniu)?
Scenariusz dynamiczny
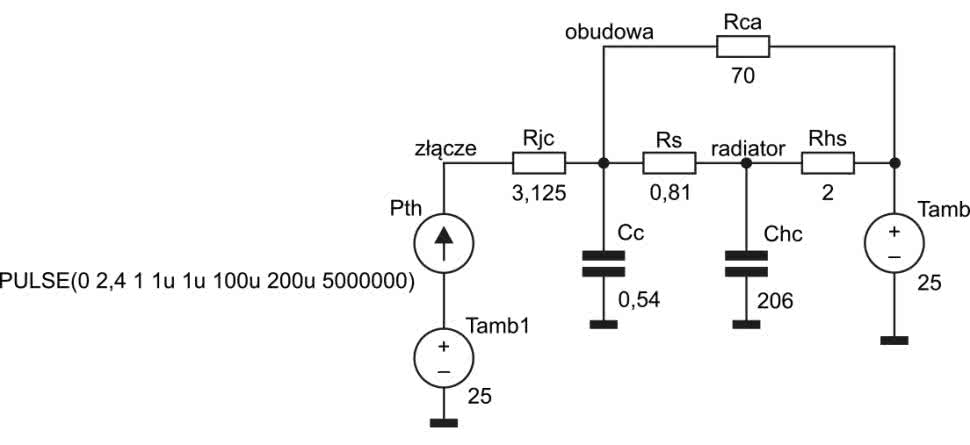
Aby zdefiniować impulsowe źródło ciepła, musimy zamiast źródła prądowego DC wstawić źródło zmienne. Charakter przebiegu PWM najlepiej będzie oddawać przebieg prostokątny, dlatego też definiujemy źródło prądowe korzystając z dyrektywy:
PULSE(0 2,44 1 1u 1u 100u 200u 5000000)
Oznacza to przebieg prostokątny o wartości równej 0 (w stanie 1) i 2,2 (w stanie 2), który uruchomi się z opóźnieniem 1 s. Czas narastania i opadania zdefiniowano, jako 1 μs, a okres impulsu 200 μs, co daje częstotliwość przełączana równą 5 kHz. Wypełnienie impulsu równe jest 50% (impuls załączony ma być przez 100 μs – połowę z okresu). Impuls powtórzyć ma się 5 milionów razy, co w naszym przypadku (symulacja trwać będzie krócej) oznacza nieskończony ciąg impulsów.
Następnie musimy dodać dynamiczne elementy systemu – pojemności cieplne. Typowa pojemność cieplna tranzystora w obudowie TO-220 to 0,54 J/K, producent nie podaje wagi ani pojemności cieplnej zastosowanego radiatora, więc możemy założyć wartość obliczoną wcześniej – 206 J/K. Dodajemy, zatem do schematu dwie pojemności o wartości, odpowiednio 0,52 F i 206 F, jak pokazano na rysunku 3.
Finalnie, musimy zmienić dyrektywę symulatora na analizę stanów przejściowych:
.tran 0 100 0
Oznacza to, że będziemy logować wszystkie wartości od 0 s do 100 s. Wyniki symulacji obrazowane są w postaci wykresów zadanego parametru w funkcji czasu. Na rysunku 4 został pokazany wykres temperatury radiatora w funkcji czasu.

Jak widać na wykresie, temperatura w czasie pierwszych 100 sekund działania systemu wzrośnie o jedynie ok 0,5°C. Ekstrapolując ten wzrost można by dojść do wniosku, że będzie ona rosła w nieskończoność, co nie jest prawdą. W rzeczywistości temperatura ustabilizuje się na pewnym poziomie – jakim? Można by prowadzić strasznie długą symulację, jednak jest to niepraktyczne i w takim wypadku warto zamienić źródło impulsowe w źródło DC o prądzie równym średniemu prądowi ze źródła impulsowego (dla przebiegu prostokątnego o wypełnieniu 50% to po prostu połowa mocy szczytowej). Na potrzeby wyznaczania de facto statycznego punktu pracy to dostatecznie dobre przybliżenie. Prawdziwie wartościowe zastosowanie dynamicznego modelowania temperatury leży gdzie indziej – w zobrazowaniu dynamiki zmian i wpływu pojemności cieplnej. Jak widać na rysunku 4 zmiana temperatury jest monotoniczna – to zasługa rezystancji i pojemności cieplnych, które działają jak filtr dolnoprzepustowy (w tym układzie) i całkują ciepło.
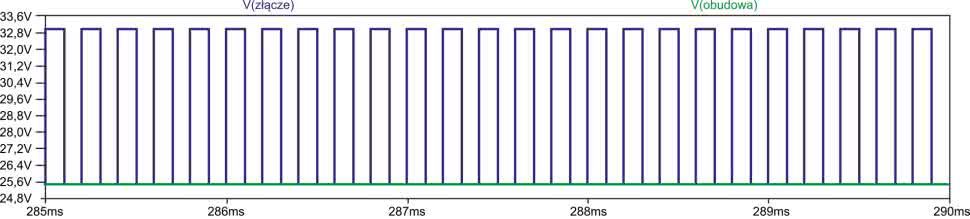
Na rysunku 5 został pokazany przybliżony przebieg temperatury złącza (niebieska linia) i radiatora (zielona linia). Widoczne są impulsowe zmiany temperatury złącza, które wygładzają zmiany temperatury na dalszych elementach systemu. Tego rodzaju zjawiska przejściowe są kluczowe w wielu systemach, np. przy sterowaniu impulsowym odbiorników wysokiej mocy (elektromagnesy, diody laserowe itp.)
Podsumowanie
Modelowanie termiczne systemów elektronicznych jest niezwykle proste, szczególnie, jeśli pozna się stojące za nimi prawa i zależności fizyczne. Równania wiążą ze sobą wszystkie własności ciał (pojemność i rezystancja cieplna) z temperaturą, mocą, ciepłem… dzięki temu znając stałe materiałowe poszczególnych komponentów w systemie z łatwością można wyznaczyć zmianę temperatury dla różnych poziomów rozpraszanej mocy.
Termodynamika może wydawać się złożona, jednak można ułatwić zrozumienie jej równań przekładając je na język elektryczny. Elektryczna analogia równań termodynamicznych ma jeszcze kolejną zaletę. Można dzięki temu zastosować oprogramowanie do symulacji układów elektronicznych również do symulacji termicznych. Takie oprogramowanie jest z pewnością doskonale znane każdemu elektronikowi, więc symulacje termiczne projektowanych układów nie będą stanowiły wielkiego problemu.
Dodatkową zaletą zastosowania oprogramowanie SPICE takiego jak LTspice do symulacji termicznych, jest możliwość zawarcia w jednej symulacji, dzięki czemu możliwe jest modelowanie nawet złożonego zachowania układu, czy też nawet wpływu zmieniającej się temperatury na parametry układów. Tylko wyobraźnia (i znajomość składni SPICE) ogranicza nasze możliwości symulacyjne. A pamiętajmy – im więcej symulacji przy projektowaniu tym, mniej nerwów przy uruchamianiu układu!
Nikodem Czechowski, EP
Źródła: