Zaloguj
Zaloguj



- podtrzymywanie napięcia 5 V po jego zaniku z zewnętrznego źródła,
- superkondensatory o bardzo długiej żywotności jako magazyn energii,
- sygnalizacja stanu pracy diodami LED: ładowanie, pełne naładowanie, podtrzymanie zasilania, niski poziom energii,
- wbudowane złącza USB oraz listwy zaciskowe,
- maksymalny prąd wyjściowy: 300 mA,
- czas podtrzymania przy obciążeniu 250 mA: około 90 s,
- czas podtrzymania przy obciążeniu 50 mA: około 6 min,
- możliwość dwukrotnego zwiększenia łącznej pojemności kondensatorów,
- pobór prądu w stanie spoczynku: około 5 mA.
Krótkotrwałe zaniki napięcia zasilającego, zwane fachowo zapadami napięcia, potrafią być brzemienne w skutkach dla naszych routerów, modemów, dysków i... kto wie, czego jeszcze? Pół biedy, jeżeli cały system można podłączyć do dużego zasilacza UPS i na niego zrzucić całą odpowiedzialność za podtrzymanie zasilania w chwilach, kiedy sieć energetyczna „robi sobie wolne”. Problem pojawia się, kiedy takiej możliwości nie ma.
Jako przykład weźmy prosty rejestrator, który po wyłączeniu musi się bardzo długo uruchamiać lub nawet wymaga jakiejś konfiguracji ręcznej, zanim powróci do pracy. Zasilany z ładowarki USB, wciśnięty gdzieś na ciasną półkę. Albo modem LTE, któremu nie w smak, kiedy się go na chwilę odłącza, bo przywrócenie go potem do pełnej sprawności trwa nawet kilka cennych minut. Stawianie dużych i ciężkich zasilaczy przy takich „maluchach” można byłoby uznać za nonsens, zwłaszcza kiedy brak na to miejsca. Wtedy można sięgnąć po opisany niżej układ.
Budowa
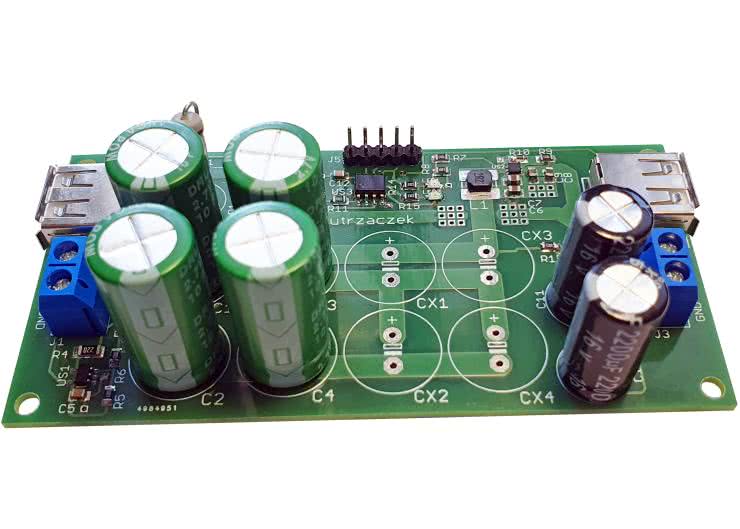
Schemat ideowy omawianego urządzenia znajduje się na rysunku 1. Magazynem energii elektrycznej są superkondensatory C1…C4 oraz CX1…CX4 o pojemności 10 F. Niestety, ich dopuszczalne napięcie pracy wynosi jedynie 2,7 V, dlatego trzeba je łączyć po dwa szeregowo, by mogły pracować przy napięciu 5 V (lub zbliżonym), jakie dostarcza magistrala USB. Wypadkowa pojemność każdej gałęzi wynosi wtedy 5 F, choć zgromadzona w nich energia pozostaje bez zmian – po prostu ładunek dzieli się między dwa kondensatory.
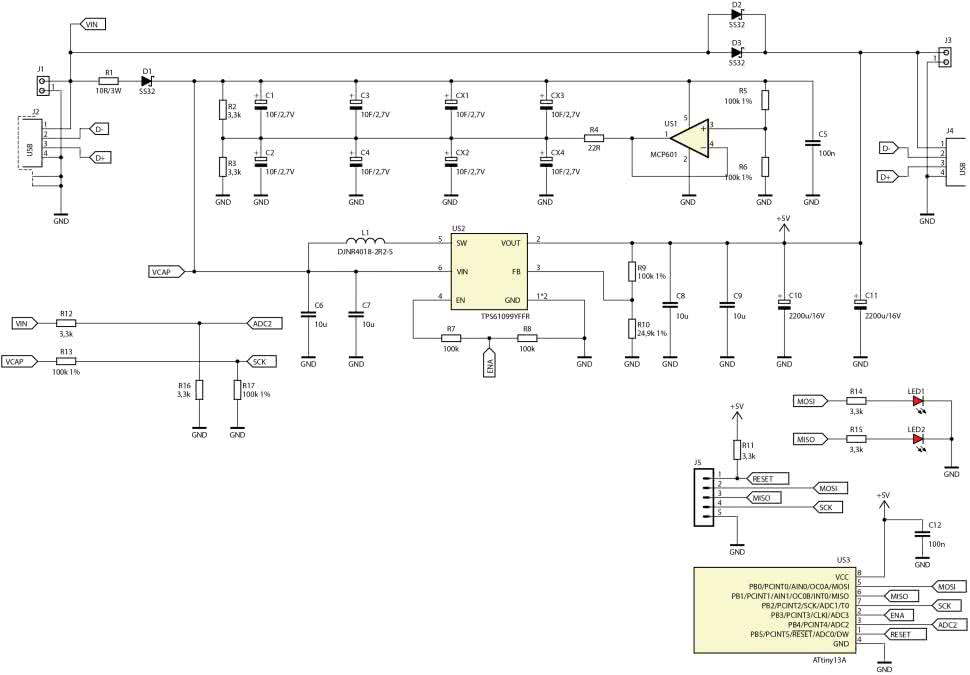
Dwa obwody pilnują tego, aby rozkładał się on możliwie po równo. Pierwszym jest dzielnik rezystancyjny, który składa się z rezystorów R2 i R3. Płynie przez niego prąd o natężeniu mniejszym niż 1 mA. Ów dzielnik działa jak źródło napięcia o SEM równej połowie napięcia przyłożonego do bloku kondensatorów, z ustaloną rezystancją wewnętrzną, przez którą będzie płynął prąd wyrównujący potencjały, jeżeli dolna lub górna część tego bloku miałaby inne napięcie od swojego partnera.
Opisany powyżej dzielnik dobrze sobie radzi przy niewielkich prądach upływu, jakie mogą powstać podczas przechowywania już naładowanego urządzenia. W trakcie ładowania oraz rozładowywania przez superkondensatory płyną prądy o sporym natężeniu, których taki dzielnik mógłby nie dać rady skompensować, dlatego tym zadaniem zajmuje się również wzmacniacz operacyjny US1 – skonfigurowany do pracy w roli wtórnika napięciowego. Przez dzielnik R5+R6, który wyznacza mu potencjał równy połowie napięcia na kondensatorach, płynie znacznie mniejszy prąd niż przez R2+R3, za to zadaniem wzmacniacza operacyjnego jest zmniejszenie rezystancji wewnętrznej tak powstałego źródła napięciowego. Rezystor R4 ustala jego rezystancję wewnętrzną na 22 Ω, aby nie uległ on wzbudzeniu podczas sterowania obciążeniem o niskiej impedancji wewnętrznej. Taki obwód ma zdecydowanie większe pole manewru, jeżeli chodzi o wymuszanie prądów upływu o większym natężeniu, za to zaczyna pracować dopiero wtedy, kiedy napięcie na kondensatorach wyniesie co najmniej 2,7 V. Ta wartość to również dopuszczalne napięcie pracy superkondensatorów, więc wzmacniacz operacyjny zajmie się wyrównywaniem napięć między nimi, zanim zostanie przekroczona bezpieczna wartość napięcia na równoległym połączeniu górnych lub dolnych superkondensatorów.
Ładowaniem pojemnościowego magazynu energii zajmuje się zwykły rezystor przewlekany o rezystancji 10 Ω i dopuszczalnej mocy 3 W. Ogranicza on ich prąd ładowania do około 0,4 A w przypadku, gdy superkondensatory są w pełni rozładowane. Szeregowo z nim znajduje się dioda D1, która pełni dwie funkcje. Nie dość, że zabezpiecza baterię superkondensatorów przed wybuchem w razie odwrotnego podłączenia zasilania, to jeszcze separuje wejście zasilania od tejże baterii. Dzięki temu można rozpoznać moment zaniku napięcia zasilającego z zewnętrznego zasilacza – potencjał katody tej diody pozostaje wtedy na wysokim poziomie (utrzymywanym przez kondensatory), zaś potencjał jej anody spada do niskiego poziomu.
Ten spadek wykrywa mikrokontroler z rodziny ATtiny, a to za pomocą dwóch dzielników napięcia. Pierwszy z nich, złożony z rezystorów R12+R16, służy do detekcji obecności napięcia wejściowego. Jego wypadkowa rezystancja, widziana od strony wejścia, jest niewielka (6,6 kΩ), dzięki czemu prąd upływu diody D1 nie może odłożyć na nim napięcia o wartości wystarczającej do fałszywej detekcji. Drugi dzielnik R13+R17 służy do monitorowania stanu naładowania superkondensatorów. Teoretycznie można byłoby się posłużyć potencjałem pochodzącym z dzielnika R5+R6, ale istnieje ryzyko, że sygnał programujący mikrokontroler mógłby zakłócić działanie wtórnika napięciowego, szkodząc tym samym superkondensatorom. Użycie tego wyprowadzenia mikrokontrolera do pomiaru napięcia wejściowego (a nie napięcia na kondensatorach) spowodowałoby natomiast, że ów pin MCU byłby sterowany przez stosunkowo niską rezystancję, co mogłoby zaburzać proces programowania układu. Lepiej zatem było wprowadzić kolejny dzielnik, czyniąc ten pomiar niezależnym od innych czynników.
Napięcie wyjściowe jest z kolei odseparowane od wejściowego dwiema połączonymi równolegle diodami typu SS32. Charakteryzują się one bardzo niskim spadkiem napięcia w kierunku przewodzenia, do czego przyczynia się również połączenie dwóch takich diod szeregowo – zmniejsza to prąd płynący przez każdą z nich, jak również spadek napięcia na ich rezystancjach szeregowych. Z napięcia wyjściowego jest zasilany wspomniany już mikrokontroler i to tłumaczy, dlaczego potrzebne były dzielniki napięciowe do pomiaru napięcia wejściowego oraz potencjału baterii superkondensatorów. Mikrokontroler używa napięcia zasilającego jako odniesienia dla przetwornika analogowo-cyfrowego. W wyniku spadku napięcia na D2 i D3 jego napięcie zasilające może być niższe niż to, które trzeba zmierzyć. Dlatego bezpieczniej było podzielić je w niewielkim stopniu, aby mieć pewność, że potencjały mierzone przez przetwornik nie będą wyższe od napięcia referencyjnego.
W otoczeniu mikrokontrolera US3 znajduje się złącze J5, poprzez które można zaprogramować jego pamięć Flash oraz ustawić bity zabezpieczające. Ma on również do dyspozycji dwie diody LED, którymi sygnalizuje stan pracy układu. Oprócz tego, w momencie odłączenia zasilania mikrokontroler może załączyć przetwornicę step-up, która podtrzyma napięcie 5 V na wyjściu przy użyciu ładunku zgromadzonego w superkondensatorach. Na wyjściu układu można znaleźć dwa kondensatory C10 i C11, których łączna pojemność 4400 μF daje chwilowy rezerwuar energii dla podtrzymywanego urządzenia w momencie, kiedy główne napięcie zasilające już zanikło, a przetwornica dopiero zaczyna startować.
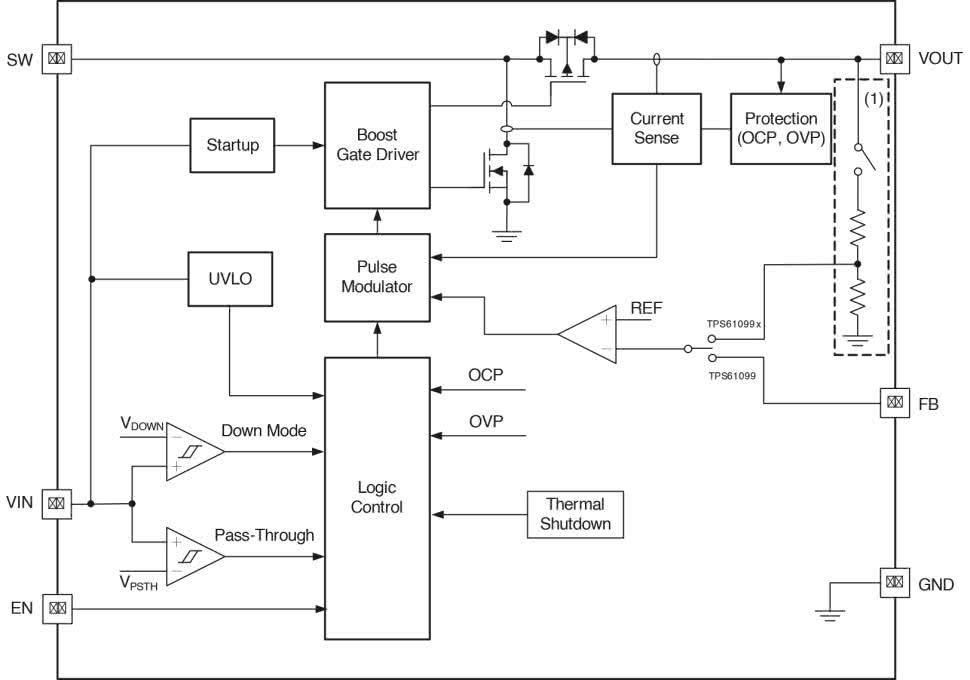
W układzie użyto przetwornicy typu TPS61099 w jej typowej aplikacji. Sterownik ma ciekawą budowę wewnętrzną – patrz rysunek 2. Oprócz tego, że ma wbudowane zabezpieczenie termiczne (co jest już dzisiaj standardem), to zawiera w swojej strukturze również tranzystory MOSFET realizujące synchroniczną przetwornicę typu boost – jeden jest kluczem, a drugi pełni funkcję diody, co ma pozytywny wpływ na sprawność całego układu. Poza tym przetwornica realizuje powolny rozruch, przez co nie są generowane niepotrzebne zakłócenia w momencie jej uruchamiania. Niestety, ten podzespół jest dostępny tylko w niewielkiej obudowie SMD.
Kondensatory C6 i C7 są umieszczone blisko wyprowadzeń US2, ponieważ przetwornica pracuje na stosunkowo wysokiej częstotliwości, wynoszącej nawet kilkaset kiloherców, choć zależy to od aktualnego napięcia wejściowego i pobieranego prądu. Impedancja wewnętrzna superkondensatorów byłaby zdecydowanie za wysoka, dlatego użyto dodatkowych kondensatorów ceramicznych – i to dwóch, w celu dodatkowej redukcji wielkości pasożytniczych. Podobnie sprawa ma się na wyjściu, gdzie zdecydowana większość składowej zmiennej prądu zamyka się w kondensatorach C8 i C9. Rezystory R9 i R10 ustalają napięcie wyjściowe – ich wartości dobrano stosownie do napięcia referencyjnego przetwornicy, wynoszącego 1 V. Zadaniem rezystora R7 jest ograniczenie natężenia ewentualnego prądu, płynącego między wyprowadzeniem mikrokontrolera a wejściem EN przetwornicy, do niewielkiej wartości.
Rezystor R8 polaryzuje natomiast to wejście potencjałem masy, utrzymując przetwornicę w stanie wyłączenia, gdyby mikrokontroler przebywał np. w stanie zerowania.
Nasuwa się jedno pytanie: czemu w tym układzie nie pokusiłem się o zmaksymalizowanie energooszczędności? Dałoby się tutaj uciąć jakieś miliampery, czyniąc podtrzymanie jeszcze dłuższym. Odpowiedź jest prosta: zasilany układ pobiera kilkadziesiąt miliamperów lub więcej. Nie ma więc sensu szczypać się o każdy możliwy do zaoszczędzenia mikroamper, ponieważ nie przełoży się to w zauważalny sposób na wydłużenie czasu pracy na superkondensatorach. Większy wpływ będzie miała temperatura otoczenia lub zużycie kondensatorów wynikające z czasu eksploatacji.
Montaż i uruchomienie
Układ został zmontowany na dwustronnej płytce drukowanej o wymiarach 100 mm × 50 mm. Jej wzór ścieżek oraz schemat montażowy przedstawia rysunek 3. W odległości 3 mm od krawędzi płytki znalazły się cztery otwory montażowe, każdy o średnicy 3,2 mm.
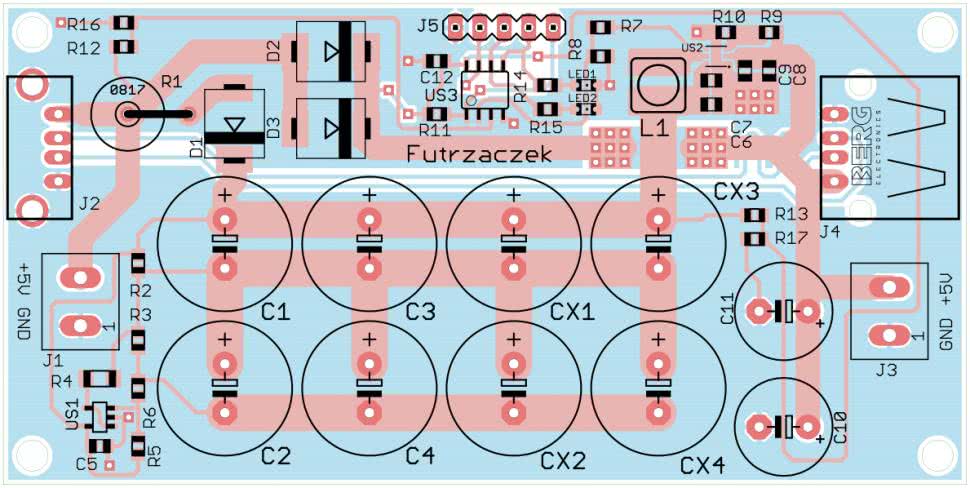
Większość elementów na płytce montowana jest powierzchniowo i to od nich proponuję rozpocząć lutowanie. Szczególną uwagę należy zwrócić na kierunek przylutowania układu US2 – na jego obudowie znajduje się mała, aczkolwiek bardzo istotna kropka. Kiedy wszystkie podzespoły SMD znajdą się już na swoich miejscach, można przejść do elementów lutowanych metodą przewlekaną, najlepiej według wysokości ich obudów.
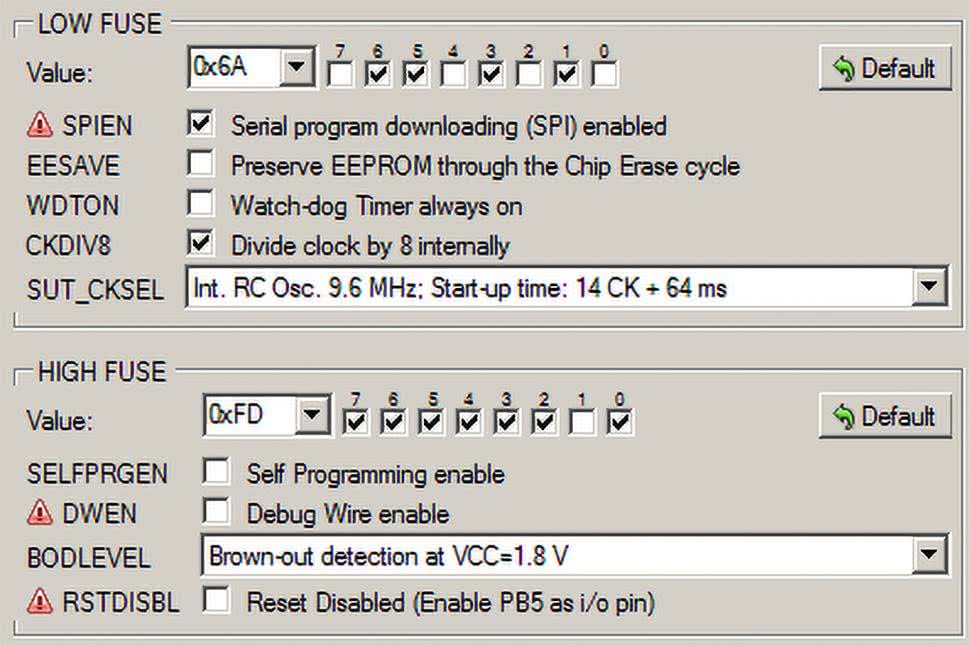
Na etapie uruchamiania konieczne jest zaprogramowanie pamięci Flash mikrokontrolera dostarczonym wsadem oraz zmiana jego bitów zabezpieczających. Oto ich nowe wartości:
Low Fuse = 0x6A
High Fuse = 0xFD
Szczegóły są widoczne na rysunku 4, który zawiera widok okna konfiguracji tychże bitów z programu BitBurner. Dzięki takiemu ustawieniu załączony pozostanie preskaler sygnału zegarowego (rdzeń będzie taktowany sygnałem o częstotliwości 1,2 MHz, co sprzyja energooszczędności) oraz włączy się Brown-Out Detector, który wprowadzi mikrokontroler w stan zerowania, jeżeli jego napięcie zasilające spadnie poniżej 1,8 V (co znacznie zmniejsza ryzyko zawieszenia się układu podczas uruchamiania).
Napięcie zasilające należy podłączyć do zacisków złącza J1 lub J2. Powinno ono wynosić około 5 V, lecz nie więcej niż 5,5 V, z uwagi na dopuszczalne napięcie pracy superkondensatorów. Na wyjściu (złącze J3 lub J4) panuje napięcie o około 0,2 V niższe od wejściowego (w trakcie pracy z zasilacza) lub 5 V przy pracy z przetwornicy. Dopuszczalny prąd wyjściowy wynosi 300 mA i jest ograniczony przez układ DC/DC. Pobór prądu w trakcie ładowania superkondensatorów wynosi około 0,4 A i spada do około 4 mA, kiedy są one już w pełni naładowane.
Złącza USB typu A, znajdujące się na płytce, mają połączone wyprowadzenia sygnałowe, lecz nie są one przewidziane do prowadzenia transmisji o dużej szybkości z racji braku dokładnej kontroli impedancji charakterystycznej tych połączeń. W takich wypadkach lepiej byłoby użyć listew zaciskowych do zasilania, a sygnały poprowadzić oddzielnie, poza płytką tego układu.
Po włączeniu zasilania będą migały dwie diody jednocześnie – to znak, że układ jest w trakcie ładowania superkondensatorów. Kiedy będą one bliskie naładowania lub już w pełni naładowane, diody zaczną świecić światłem ciągłym. Po zaniku napięcia zasilającego układ przejdzie w tryb podtrzymywania napięcia, co zasygnalizuje ciągłym świeceniem tylko diody LED1. Kiedy energia w superkondensatorach zacznie się kończyć (napięcie spadnie poniżej 1,5 V), ta dioda zacznie migać, sygnalizując rychły koniec działania. Potem zgaśnie i układ się wyłączy.
Na jak długo wystarcza takie podtrzymanie? Przy czterech superkondensatorach C1…C4 układ jest w stanie zasilać odbiornik pobierający 250 mA przez około 90 s w temperaturze pokojowej. Kiedy pobór prądu wynosi 50 mA, czas ten wydłuża się do jakichś sześciu minut. Wlutowując dodatkowe pary superkondensatorów CX1+CX2 oraz CX3+CX4, można wydłużyć ten czas. Pełne naładowanie superkondensatory osiągają po 10 minutach pracy z zasilaczem – przy liczniejszym ich gronie, czas ten wydłuży się proporcjonalnie.
Rysunek 5 zawiera oscylogram napięcia wyjściowego w momencie, kiedy obciążenie pobiera prąd o natężeniu 250 mA i zanika napięcie wejściowe. Widać wyraźnie, że potencjał na dodatniej szynie zasilania nie spada o więcej niż 0,5 V, zanim nie załączy się przetwornica, a cały proces trwa jakieś 15 ms.
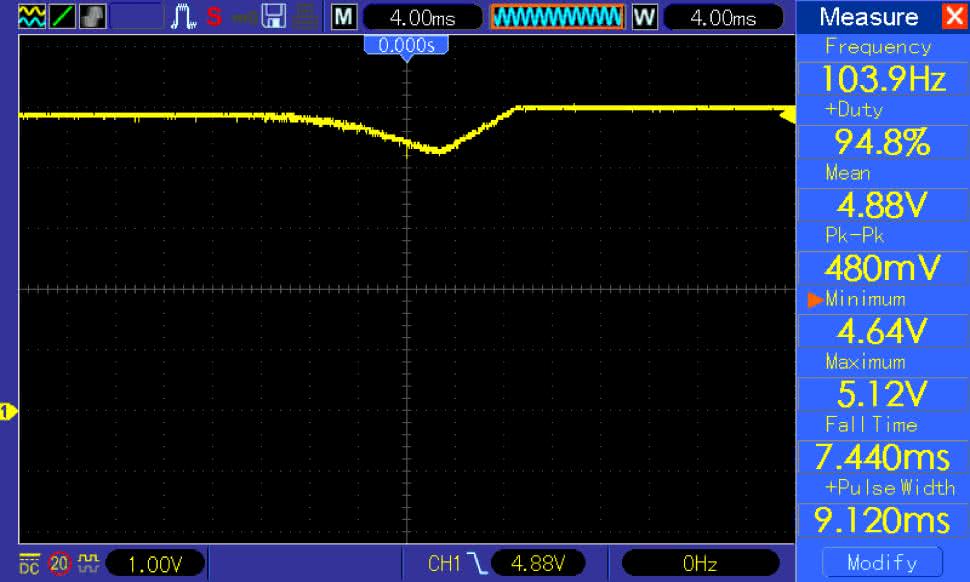
Na koniec uwaga eksploatacyjna: napięcie wejściowe musi zanikać możliwie szybko, aby mikrokontroler zdążył wykryć jego brak, zanim skończy się energia w kondensatorach C10 i C11.
Michał Kurzela, EP
- R1: 10 Ω 3 W (THT)
- R2, R3, R11, R12, R14…R16: 3,3 kΩ (SMD 0805)
- R4: 22 Ω (SMD 1206)
- R5, R6, R9, R13, R17: 100 kΩ 1% (SMD 0805)
- R7, R8: 100 kΩ (SMD 0805)
- R10: 24,9 kΩ 1% (SMD 0805)
- C1…C4: 10 F / 2,7 V np. KE10/2.7VDRL (raster 5 mm THT)
- C5, C12: 100 nF (SMD 0805)
- C6…C9: 10 μF (SMD 0805)
- C10, C11: 2200 μF / 16 V (raster 5 mm)
- CX1…CX4: 10 F / 2,7 V raster 5 mm THT np. KE10/2.7VDRL (opis w tekście)
- D1…D3: SS32 (SMC)
- LED1, LED2: dioda LED czerwona, np. LED SMD R (SMD 0805)
- US1: MCP601 (SOT23-5)
- US2: TPS61099YFFR (WSON6)
- US3: ATtiny13A-SSU (SO8)
- J1, J3: ARK2/500
- J2: USB męskie kątowe typu A, np. WTYK USB A KĄT DRUK
- J4: USB żeńskie kątowe typu A, np. USB A KĄT BIAŁE
- J5: goldpin 5 pin 2,54 mm męski THT
- L1: DJNR4018-2R2-S