Zaloguj
Zaloguj



Tor analogowy starszego zasilacza był zbudowany w oparciu o wysokonapięciową wersję wzmacniacza operacyjnego mA741. To powodowało ograniczenie napięcia wyjściowego do 24 V DC. W nowym zasilaczu zastosowałem analogowe rozwiązanie układowe niemające tego typu ograniczenia, zaproponowane przez Marka Stuarta w czasopiśmie „Everyday with Practical Electronics”. Jednak jego rozwiązanie nie było przystosowane do sterowania poprzez sterownik mikroprocesorowy, więc wartości większości elementów trzeba było przeliczyć od nowa. Z oryginalnego rozwiązania pozostała topologia poszczególnych analogowych bloków funkcjonalnych i co bardziej istotne – ogólna idea pracy zasilacza.
Przyjąłem, że zasilacz będzie źródłem napięcia stałego z zakresu 0…28 V o maksymalnej wydajności prądowej 3A. Założyłem też, że układ będzie sterowany przez sterownik mikroprocesorowy i będzie mierzył napięcie wyjściowe oraz prąd wyjściowy. Pomiar prądu umożliwi wykonanie regulowanego ograniczenia prądowego. Po osiągnięciu zadanej wartości prądu jest ograniczane napięcie wyjściowe. Ograniczenie prądowe zapewnia też odporność zasilacza na zwarcie. Zasilacz pracuje wtedy jako źródło prądowe bez funkcji odcięcia rozumianej jako znaczne ograniczenie prądu wyjściowego przy zwarciu na wyjściu. Układ ma być typowym stabilizatorem analogowym z szeregowym tranzystorem regulacyjnym.
Całe urządzenie zostało funkcjonalnie i konstrukcyjnie podzielone na dwie części: układ analogowy zasilacza i układ sterownika mikroprocesorowego. Jednocześnie układ analogowy został tak skonstruowany, by mógł pracować bez sterownika. Elementami regulacyjnymi są wtedy potencjometry (najlepiej wieloobrotowe), a do pomiaru napięcia i prądu osobne analogowe lub cyfrowe mierniki.
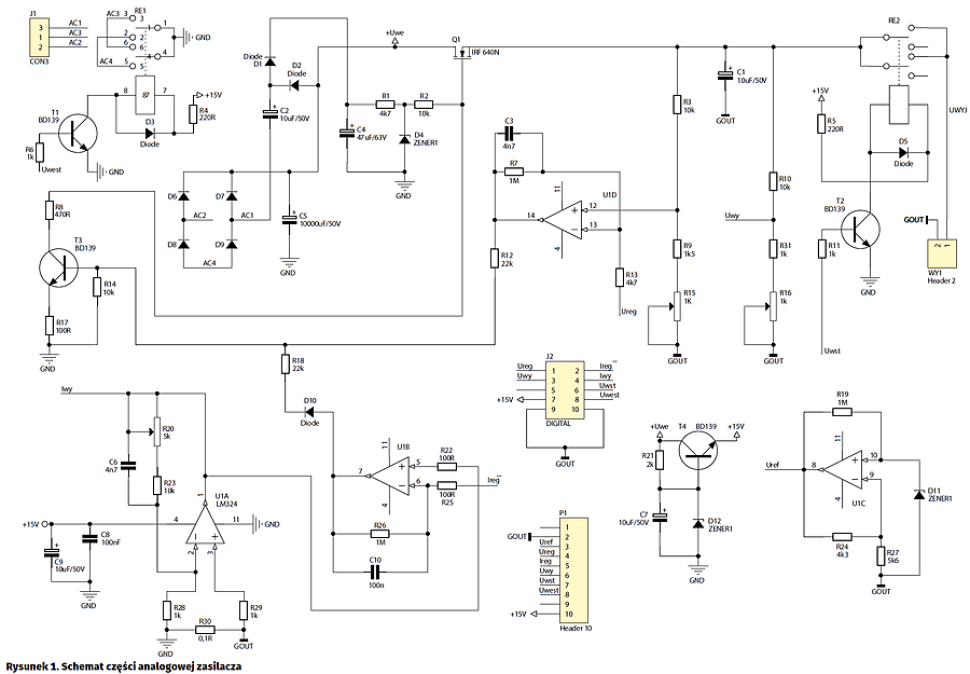
Schemat bloku analogowego pokazano na rysunku 1. Budowa i zasada działania regulowanego, analogowego, stabilizowanego zasilacza prądu stałego jest ogólnie znana. Można w nim wyróżnić: źródło napięcia odniesienia, wzmacniacz błędu, tranzystor regulacyjny mocy. Ponadto do opisywanego zasilacza dodano następujące bloki pomocnicze: blok pomiaru napięcia i prądu, blok ograniczenia prądowego, blok napięcia pomocniczego (powielacz napięcia).

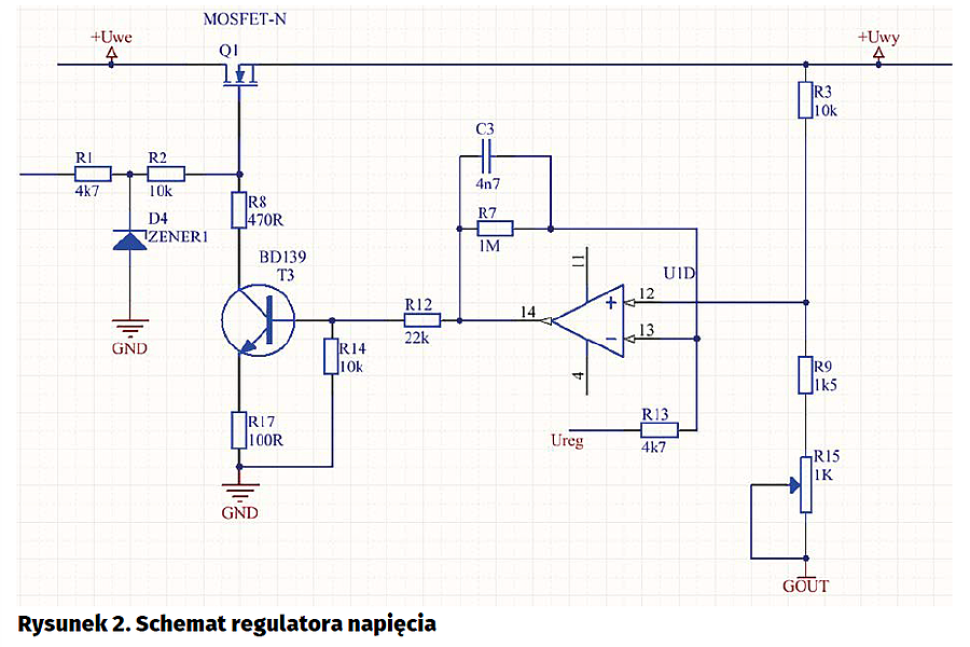
Napięcie na wyjściu można wyliczyć z zależności Uwy=Ureg×(1+R3/(R9+R15)). Dzielnik napięcia wyjściowego obliczmy następująco:
- Zakładamy, że napięcie referencyjne będzie się zmieniało w zakresie 0…4 V. Wynika to z właściwości przetworników C/A zastosowanego mikrokontrolera (będzie to wyjaśnione dalej).
- Z założenia wiemy, że napięcie wyjściowe zasilacza może maksymalnie wynosić 28 V.
- Wzmocnienie układu
1+R3/(R9+R15) = 28/4=7.
R3/(R9+R15)=6.
Do wyliczenia dzielnika można użyć strony https://goo.gl/ZvF1NU. Ja przyjąłem R3=10 k V i dla podziału przez 6 suma R9+R15 jest równa 2 k V. Próby zastosowania dwóch łatwo dostępnych rezystorów 10 k V i 2 k V o tolerancji 1% nie dały zadowalających efektów i dlatego użyto połączonych szeregowo: rezystora 1,5 k V i potencjometru wieloobrotowego 1 k V.
Układ pomiaru napięcia na płytce analogowej jest dzielnikiem rezystancyjnym dzielącym napięcie wyjściowe przez 7 (przy napięciu +28 V na wyjściu dzielnika występuje +4 V). Tu również zastosowałem dzielnik z potencjometrem wieloobrotowym, aby dokładnie ustawić stopień podziału. Dzielnik jest zbudowany z rezystorów R10, R31 i R16 (rysunek 3). Suma wartości rezystancji R31 i R16 powinna być równa 1,66 k V dla R10=10 k V.
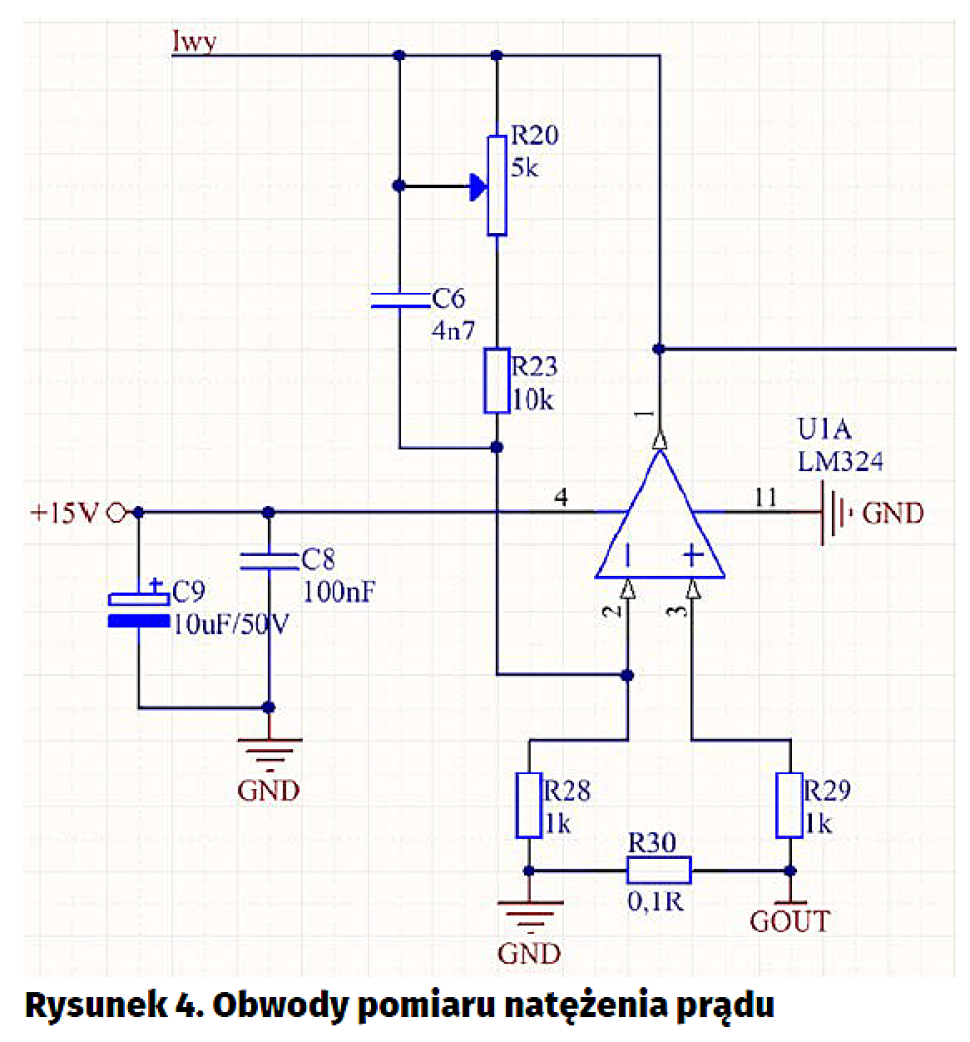
Napięcie wyjściowe powinno być niezależne od spadku napięcia na rezystorze pomiarowym, więc jego próbka w układzie regulacji musi te spadki uwzględniać. Masa GOUT (pokazana na rys. 4) jest jednocześnie ujemnym biegunem napięcia wyjściowego. Dzielnik dzielący napięcie wyjściowe w układzie regulatora jest połączony z tą masą (rys. 2). Powoduje to, że napięcie wyjściowe zasilacza jest niezależne od spadku na rezystorze pomiarowym R30.
Przy pomiarze prądu metodą techniczną najlepiej, aby rezystor pomiarowy miał jak najmniejszą rezystancję. Jednak na rezystorze o małej rezystancji występuje niewielki spadek napięcia, które jest trudno zmierzyć. Przy rezystancji 0,1 V i maksymalnym prądzie wyjściowym zasilacza na poziomie 3 A spadek wyniesie 0,3 V. To zdecydowanie za mało, żeby można było zmierzyć bezpośrednio to napięcie przetwornikiem o zakresie pomiarowym 0…4 V. Dlatego musi być wzmocniony, aby przy prądzie 3 A mikrokontroler mierzył napięcie zbliżone do 4 V. Do wzmocnienia zastosowano wzmacniacz operacyjny pracujący w konfiguracji nieodwracającej, jak to pokazano na rysunku 4. Wzmocnienie powinno wynosić ok. 4 V/0,3 V= 13,33. Wzmocnienie wzmacniacza nieodwracającego jest wyliczane z zależności: Ku=1+(R20+R23)/R28. Jeżeli dobierzemy rezystory, aby R11+R12/R17 było równe 12,33, to wzmocnienie całego układu będzie równe 13,33. Łatwo obliczyć, że R11+R12= 12,33 k V przy R17=1 k V. Tu również zastosowałem potencjometr wieloobrotowy 5 k V połączony szeregowo z rezystorem 10 k V. Jest to konieczne z dwóch powodów. Po pierwsze, trudno jest znaleźć rezystor o rezystancji 12,33 k V, a po drugie, regulowane wzmocnienie pozwoli na skorygowanie niepewności rezystancji pomiarowej. Jak pokazała praktyka, układ z potencjometrem pozwala na uzyskanie satysfakcjonujących wyników pomiaru prądu.
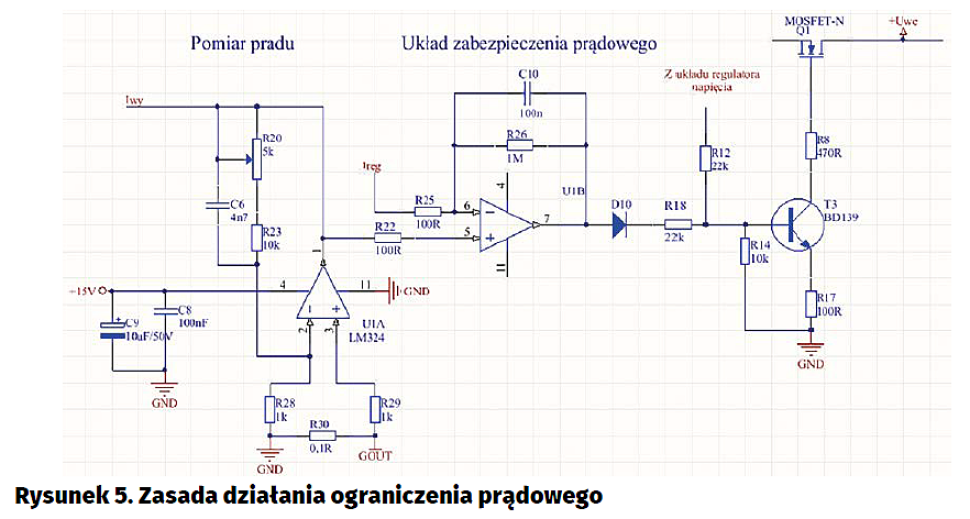
Na rysunku 5 zilustrowano zasadę działania układu zabezpieczenia prądowego. Komparator analogowy porównuje napięcie z wyjścia układu pomiaru prądu z napięciem referencyjnym Ireg określającym natężenie prądu, przy którym układ zaczyna ograniczać napięcie wyjściowe zasilacza. Kiedy napięcie z układu pomiaru prądu próbuje przekroczyć wartość napięcia Ireg, wtedy na wyjściu komparatora U1B występuje napięcie ograniczające napięcie wyjściowe zasilacza. Napięcie wyjściowe jest ograniczane do takiego poziomu, przy którym prąd nie przekroczy ustawionej wartości. Dioda D10 separuje wyjście komparatora od wyjścia układu regulatora napięcia.
Układ komparatora jest podatny na wzbudzenia i aby im zapobiec, stosuje się filtr RC: rezystor R26 i kondensator C10 w gałęzi ujemnego sprzężenia zwrotnego. Brak kondensatora C10 lub zbyt mała pojemność powoduje powstanie sporych oscylacji o wysokiej częstotliwości w momencie zadziałania układu ograniczenia prądowego.
Układy zasilające
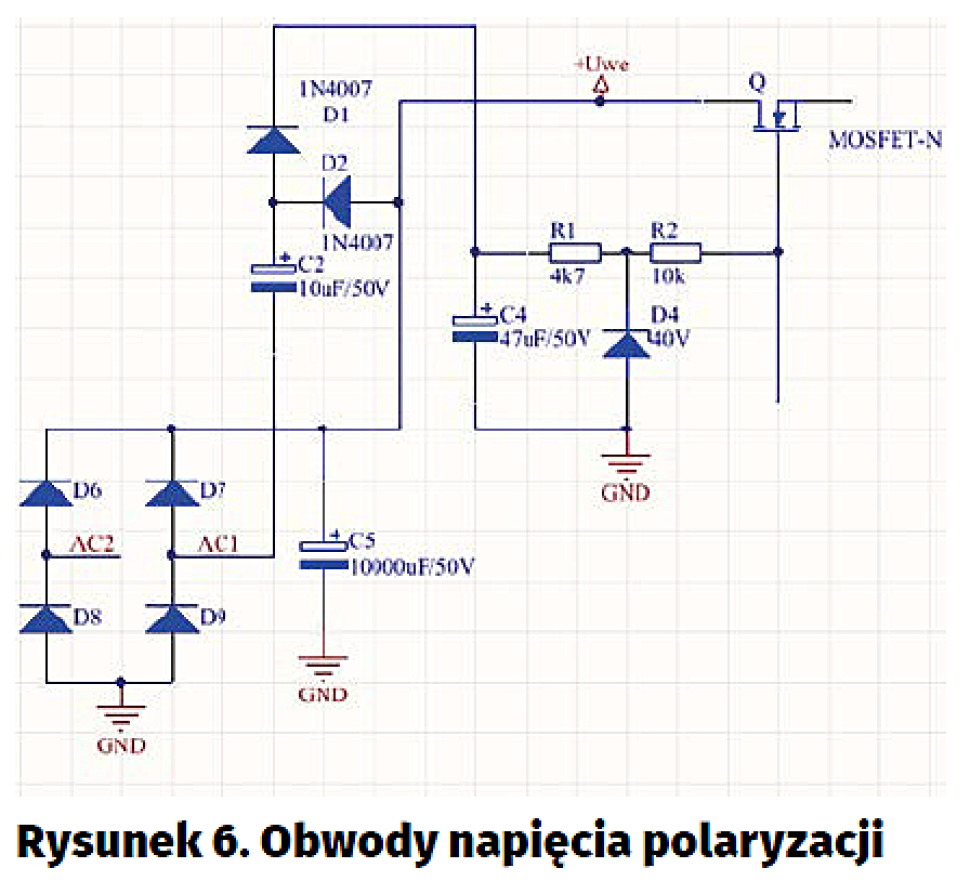
Źródłem napięcia wejściowego Uwe jest transformator sieciowy o mocy 100 VA i napięciu wyjściowym 32 V AC. Mostek prostowniczy składa się z czterech diod krzemowych o maksymalnym prądzie 10 A. Główny kondensator filtrujący ma pojemność 10 mF i napięcie znamionowe 50 V. Szeregowy tranzystor regulacyjny NMOS wymaga, aby napięcie na bramce (G) było o kilka woltów wyższe od napięcia źródła (S). Dla umożliwienia prawidłowej polaryzacji tranzystora zastosowano powielacz napięcia pokazany na rysunku 6. Napięcie z wyjścia powielacza jest stabilizowane diodą Zenera (40 V) i podawane przez rezystor R2 na bramkę tranzystora szeregowego Q1.
Do zasilania wzmacniacza operacyjnego LM324 oraz sterownika mikroprocesorowego zastosowałem stabilizator napięcia z tranzystorem BD139 i 15-woltową diodą Zenera.
Sterownik zasilacza ma za zadanie wykonać regulację napięcia wyjściowego i ograniczyć prąd obciążenia. Ponadto musi mierzyć wartość ustawionego napięcia i prąd pobierany z zasilacza. Do wykonania tych zadań będziemy potrzebowali dwóch przetworników C/A i dwóch wejść przetwornika A/C. W poprzedniej wersji zasilacza zastosowałem 32-bitowy mikrokontroler STM32F100RBT6B, głównie ze względu na wbudowane dwa przetworniki C/A – w tym zdecydowałem się na użycie mikrokontrolera PIC16F1769 firmy Microchip. Oprócz zaawansowanych cyfrowych modułów funkcjonalnych PIC16f1769 ma dwa 10-bitowe przetworniki C/A, 10-bitowy przetwornik A/C, programowane źródło napięcia odniesienia oraz wzmacniacze operacyjne. Te analogowe peryferie są w zupełności wystarczające, aby zbudować sterownik zasilacza bez konieczności stosowania dodatkowych elementów w torach analogowych. Wersje PIC16F1xxx mogą być zasilane napięciem +5 V, co jest korzystne ze względu na większą odporność na zaburzenia.
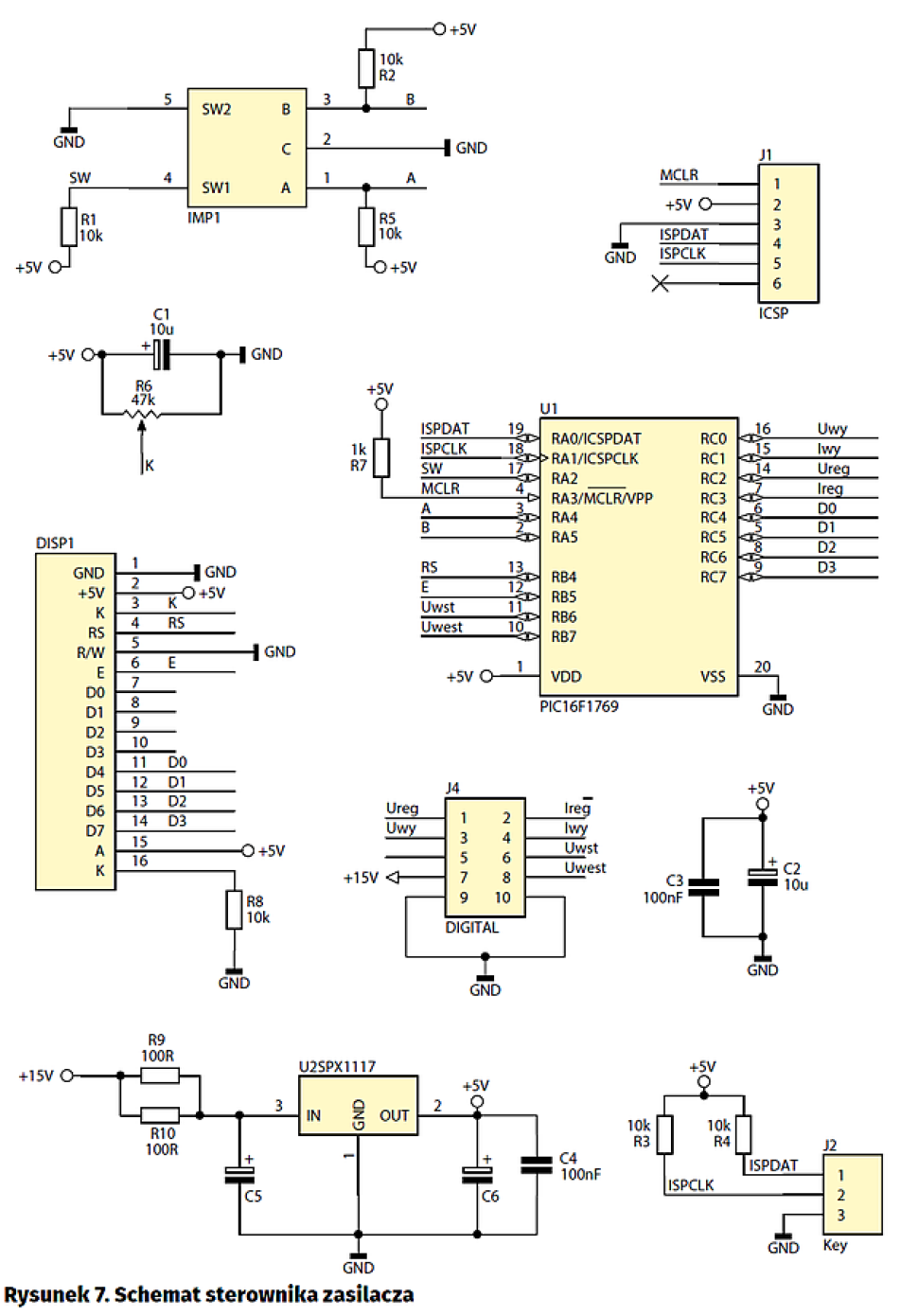
Schemat sterownika pokazano na rysunku 7. Interfejs użytkownika stanowią: alfanumeryczny wyświetlacz LCD DISP1 mieszczący 4×20 znaków oraz impulsator IMP1 ze stykiem zwieranym przez naciśnięcie osi. Złącze J4 (ICD10) jest przeznaczone do doprowadzenia sygnałów sterujących analogowych i cyfrowych z płytki sterownika do płytki analogowej oraz napięcia +15 V zasilającego sterownik. Jest ono podawane poprzez połączone równolegle rezystory R9 i R10 na wejście stabilizatora U2 (SPX1117-5.0) zasilającego sterownik. Spadek napięcia na tych rezystorach jest tak dobrany, aby napięcie na wejściu U2 miało wartości ok. +12 V. Złącze J1 jest przeznaczone dla programatora PICkit-3.
Tomasz Jabłoński, EP