 Zaloguj
Zaloguj



- obciążanie linii CP (Control Pilot) wychodzącej ze stacji ładującej do samochodów elektrycznych,
- możliwość wymuszania charakterystycznych dla tej linii stanów (A…E),
- zgodność z normą IEC 61851-1,
- prosta obsługa przy użyciu przełączników.
Auto elektryczne, po podłączeniu do odpowiedniej ładowarki, rozpoczyna z nią prosty, acz treściwy dialog. Ładowarka wytwarza sygnał PWM o częstotliwości 1 kHz i wartości maksymalnej wynoszącej +12 V oraz minimalnej równej -12 V. Źródło tego sygnału ma rezystancję wyjściową wynoszącą 1 kΩ. Po drugiej stronie kabla, w aucie, wbudowany jest prosty układ rezystorowy, który obciąża tę linię w określony sposób, kiedy samochód znajduje się w odpowiednim stanie ładowania. Na tej podstawie ładowarka może wiedzieć, co się z samochodem dzieje, jednocześnie zadając prąd do ładowania o określonym natężeniu - przy pomocy sygnału PWM. Tyle mówi norma IEC 61851-1, która precyzuje zasady dotyczące tej komunikacji. A dokładniej - trzeci tryb, bowiem norma definiuje cztery różne metody. Ten opisany jest najpowszechniej spotykany. W nim ładowanie odbywa się prądem przemiennym, z kontrolą prądu ładowania po stronie ładowarki.
Zaprezentowany prosty układ realizuje tę część systemu, która jest wbudowana w samochód elektryczny. Na potrzeby przeprowadzenia testów urządzenia ładującego - czy to naprawianego, czy będącego w fazie prototypu - możemy wymuszać przełącznikami określone stany pracy, po czym oscyloskopem podglądać przebieg czasowy napięcia na tej linii. To znacznie prostsze (i zarazem bezpieczniejsze) niż podłączanie potencjalnie niedziałającego urządzenia do samochodu elektrycznego, który też nie musi być podręcznym elementem wyposażenia pracowni elektronika.
Do ładowania samochodu elektrycznego prądem przemiennym najczęściej jest stosowane złącze zdefiniowane w normie IEC 62893-1. Łączy ono linie o następujących nazwach i funkcjach:
- L1, L2, L3 - fazy sieci elektroenergetycznej (może być tylko L1),
- N - przewód neutralny,
- PE - przewód ochronny,
- PP - Proximity Pilot - sygnał obecności (definiujący prąd maksymalny),
- CP - Control Pilot - sygnał sterujący, zapewniający dwustronną komunikację między ładowarką a ładowanym pojazdem.
Artykuł dotyczy urządzenia, które symuluje samochód elektryczny od strony linii CP.
Budowa i działanie
Schemat ideowy omawianego układu znajduje się na rysunku 1. Nie znajdziemy na nim układów scalonych, a jedynym półprzewodnikiem jest dioda D1. Taki schemat narzuca norma IEC 61851-1, zgodnie z którą ten układ powstał. Rezystory R1…R3 służą do obniżania wartości maksymalnej napięcia na linii CP, gdyż tworzą - z wbudowanym w ładowarkę rezystorem 1 kΩ - dzielnik rezystancyjny.
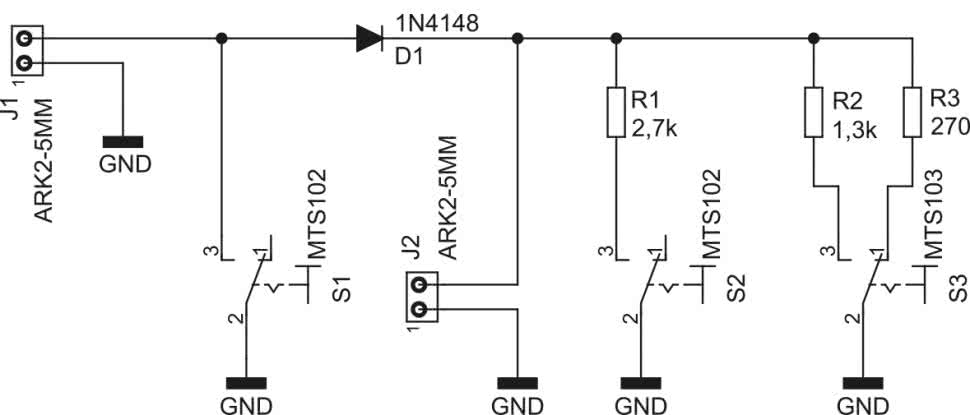
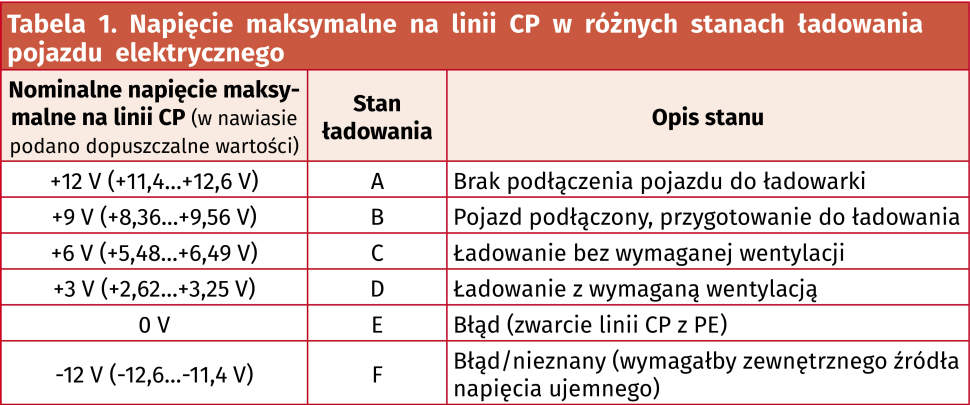
W tabeli 1 opisano stany ładowania samochodu elektrycznego oraz wartość maksymalną napięcia na linii CP. Łatwo można policzyć, że te wartości napięcia są możliwe do uzyskania na linii CP (mierzone na złączu J1, nie J2!), jeżeli w obliczeniach dotyczących dzielnika rezystorowego uwzględni się spadek napięcia na diodzie D1. Ulega ona zatkaniu przy napięciu chwilowym niższym od zera, więc ujemne części sygnału PWM nie będą dzielone - wartość minimalna sygnału zawsze powinna wynosić około -12 V.
Na złączu J2 możemy obserwować sygnał „widziany” przez samochód elektryczny. Będzie to przebieg o wartościach nieujemnych, z wartością szczytową niższą o około 0,7 V od tego, który jest na linii CP, ale z zachowanym wypełnieniem. To w nim jest ukryta informacja o aktualnym prądzie ładowania, który steruje kontrolerem ładowania ogniw litowo-jonowych.
Montaż i uruchomienie
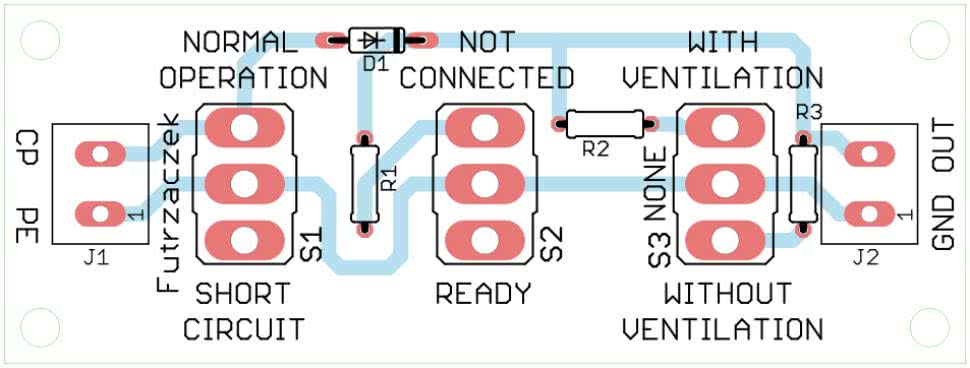
Układ został zmontowany na jednostronnej płytce drukowanej o wymiarach 80×30 mm. Jej schemat został pokazany na rysunku 2. W odległości 3 mm od krawędzi płytki znalazły się cztery otwory montażowe, każdy o średnicy 3,2 mm.
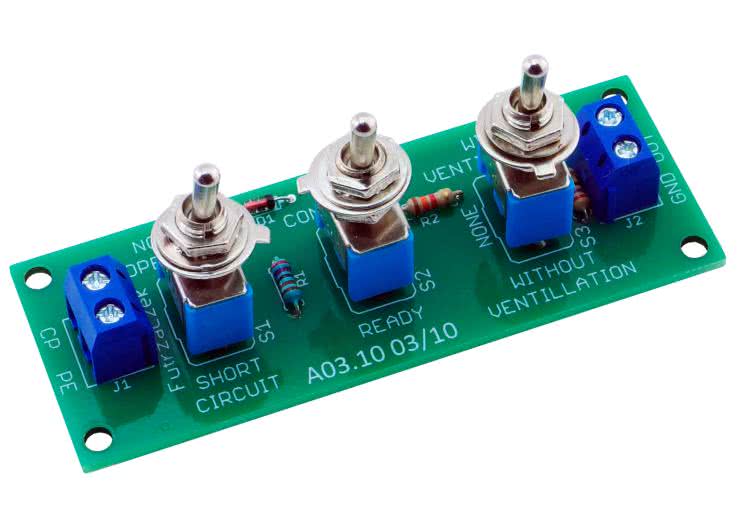
Montaż proponuję rozpocząć od elementów o najmniejszej wysokości obudowy, czyli rezystorów i diody. Potem proponuję wlutować złącza śrubowe, zaś na końcu przełączniki. Proszę pamiętać, że przełącznik trzypozycyjny (MTS103) powinien znaleźć się w miejscu przewidzianym dla S3. Zmontowany układ można zobaczyć na fotografii tytułowej.
Prawidłowo zmontowany układ jest od razu gotowy do działania. Do zacisków złącza J1 należy podłączyć testowaną ładowarkę, a dokładniej linię CP i przewód ochronny PE, który stanowi drogę powrotną dla prądu płynącego przez linię CP. Do złącza J2 można podłączyć oscyloskop lub woltomierz z przetwornikiem wartości szczytowej. W ten sposób można mieć podgląd na sygnał, który trafia na pozostałe obwody samochodu elektrycznego, służące do pomiaru częstotliwości, wypełnienia i wartości maksymalnej tego sygnału.
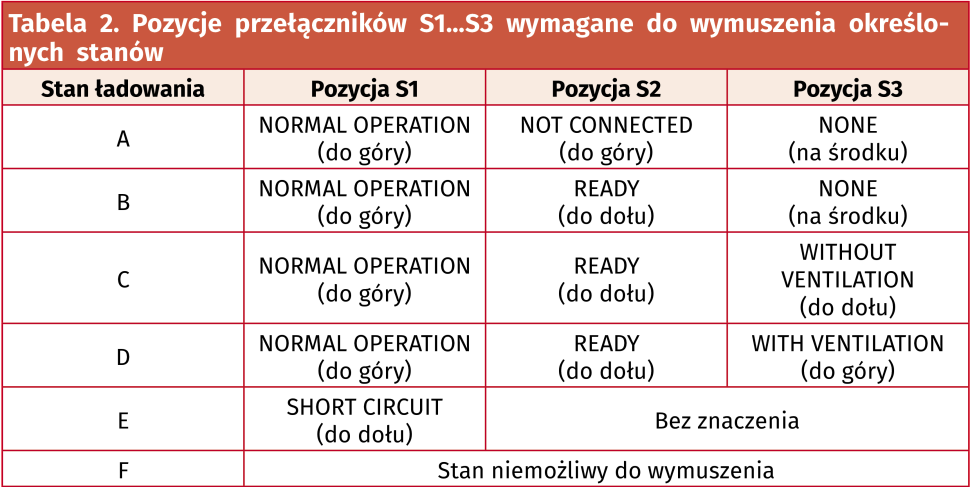
Przełącznikami S1…S3 można emulować różne stany ładowania samochodu elektrycznego. Zostały one zebrane w tabeli 2.
Układ nie zawiera obwodu polaryzującego linię PP (Proximity Pilot). Do tego można użyć zasilacza napięcia stałego wraz z rezystorem 1 kΩ podłączonym do wyjścia, jeżeli zachodzi taka potrzeba.
Michał Kurzela, EP
Bibliografia:
- R1: 2,7 kΩ 1%
- R2: 1,3 kΩ 1%
- R3: 270 Ω 1%
- D1: 1N4148
- J1, J2: ARK2/500
- S1, S2: MTS102
- S3: MTS103












