Zaloguj
Zaloguj



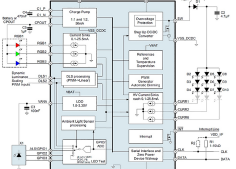
Układ DRV8825 zawiera sterownik silnika krokowego z obsługą mikrokoku, aż do 1/32 (z kontrolą prądu uzwojeń przez wewnętrzny przetwornik C/A) i dwa mostki H w oparciu na tranzystorach MOSFET, zdolnych do dostarczenia ciągłego prądu 1,75 A na każdy mostek (w szczycie 2,5 A), przy napięciu zasilania VM=9…45 V. Układ uzupełniono także o sygnalizację stanów awaryjnych takich jak przegrzanie, przeciążenie, zwarcie i blokadę podnapięciową, sygnalizowane na wyjściu nFAULT.


Napięcie Vref pochodzi z dzielnika R3, R4 zasilanego z wewnętrznego 3,3 V. Dodatkowy dzielnik ułatwia precyzyjny dobór prądu uzwojeń. Napięcie A,BVref powinno zawierać się w zakresie 1…3,3 V dla zachowania najwyższej dokładności układu pomiarowego. Taki sposób doboru ułatwia zastosowanie typowej, łatwo dostępnej wartości rezystorów RA, RB. Podczas doboru należy zwrócić uwagę na moc traconą w RA, RB i starać się utrzymywać ich najmniejszą możliwą wartość (0,2…0,5 V). Silnik jest dołączany do złączy MA oraz MB.
Układ DRV8825 jest sterowany standardowymi sygnałami:
− nEN=0 załączającym sterownik,
− DIR określającym kierunek obrotów,
− STEP, którego każde zbocze narastające taktuje wbudowany indekser.
Wszystkie sygnały sterujące są zgodne z logiką 3,3–5 V. Zwora DEC umożliwia określenie zachowania się sterownika mostka H podczas hamowania (DECAY) dopasowanego do wymogów aplikacji. Dostępne są trzy tryby: Low/Mixed/Fast. Tryb Low (zwarcie uzwojeń) wybierany jest poprzez zlutowanie wyprowadzeń 2–3, tryb Fast (przeciwprąd) zlutowane 1–2, tryb Mixed (tryb mieszany) – obie zwory pozostają rozwarte.
Wejścia M0…M2 określają liczbę mikrokroków wbudowanego indeksera zgodnie z tabelą 1.
Układ ma możliwość dynamicznej zmiany trybu mikrokoku. Podczas każdego narastającego zbocza STEP wartości M0…M2 są odświeżane i indekser generuje zmieniony ciąg sterowania. Umożliwia to np. płynne i dokładniejsze sterowanie silnikiem przy zbliżaniu się do pozycji zadanej. Sygnał nRESET=0 wyłącza mostki H oraz ustawia pozycję odniesienie indeksera (45°). Sygnał nSLEEP=0 wprowadza układ w tryb obniżonego poboru mocy, w którym pobór prądu przy zasilaniu VM=24 V nie przekracza 20 mA. Stany awaryjne sygnalizowane są na wyjściu nFLT. Sygnał nFLT wykorzystany jest do automatycznego „uśpienia” układu dla ograniczenia traconej mocy.
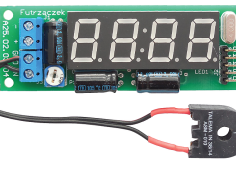
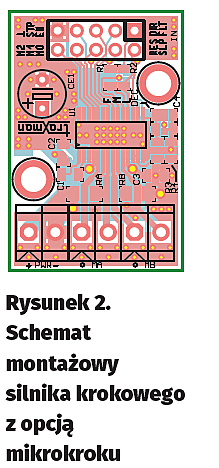
Moduł zmontowano na dwustronnej płytce drukowanej. Rozmieszczenie elementów ilustruje rysunek 2. Przed montażem układu należy dobrać rezystory RA, RB oraz dzielnik R3/R4 w zależności od typu zastosowanego silnika. Sposób montażu jest typowy. Należy jedynie poprawnie przylutować pad termiczny.
Adam Tatuś, EP