Zaloguj
Zaloguj




Artykuł otwiera krótką serię publikacji poświęconych wybranym zagadnieniom, związanym z nowoczesnymi czujnikami optycznymi. W pierwszej kolejności skupimy się na coraz liczniejszych grupach sensorów natężenia światła, czujnikach zbliżeniowych oraz specjalistycznych elementach przeznaczonych do pomiaru odległości w szerokim zakresie. W naszej prezentacji pokażemy wprawdzie przede wszystkim sensory scalone, ale przy okazji - tam, gdzie będzie to uzasadnione - zahaczymy także o rozwiązania modułowe.
Elementy optoelektroniczne stanowią obecnie - obok układów scalonych - jedną z najbardziej rozbudowanych i zróżnicowanych grup komponentów. W wielu aplikacjach zastąpienie czujników optycznych jest oczywiście niemożliwe, co wynika wprost z właściwości danego obiektu lub zjawiska - dość powiedzieć chociażby o kolorymetrii czy też badaniach optycznych parametrów próbek biologicznych. Inne urządzenia korzystają natomiast z czujników optycznych z diametralnie odmiennych pobudek - przykładowo, pomiary odległości z użyciem lasera zapewniają duży zasięg i doskonałą zbieżność wiązki sondującej (w przeciwieństwie do dalmierzy ultradźwiękowych).
Czujniki i konwertery natężenia światła
Najprostszą realizacją czujnika natężenia światła może być fotorezystor lub fototranzystor, pracujący w układzie dzielnika napięciowego - sygnał wyjściowy, w postaci napięcia zależnego od jasności padającego na fotoelement promieniowania, wystarczy zmierzyć za pomocą przetwornika analogowo-cyfrowego czy też nawet poddać dyskretyzacji za pomocą komparatora. Takie banalnie proste rozwiązanie ma jednak szereg wad, które szczególnie uwidaczniają się w energooszczędnych urządzeniach mobilnych bądź czujnikach IoT - szeregowa rezystancja dzielnika (w warunkach silniejszego oświetlenia) zawiera się zwykle w przedziale od kilku do kilkudziesięciu kiloomów, co przekłada się na ciągły pobór prądu w zakresie od kilkudziesięciu do kilkuset mikroamperów. Można rzecz jasna zastosować dyskretny klucz tranzystorowy, załączający czujnik tylko na czas pomiaru, ale wiązałoby się to z zajęciem dodatkowego miejsca na PCB oraz… następnej linii GPIO mikrokontrolera.
Kolejny problem to zakres dynamiki pomiaru - skutecznie działający czujnik ALS (ambient light sensor) powinien być w stanie pracować zarówno w silnym, bezpośrednim oświetleniu słonecznym, jak i w delikatnym świetle sztucznym wewnątrz ciemnego pomieszczenia. Co więcej - dolny zakres czułości sensora powinien umożliwiać także pracę za częściowo zaciemnionym okienkiem optycznym, np. znajdującym się tuż nad ekranem smartfona. Dyskretna realizacja takiego układu wymagałaby zatem zastosowania ADC o dużej rozdzielczości, znacznie przewyższającej osiągi przetworników, jakie można znaleźć w znakomitej większości współczesnych mikrokontrolerów.
Inną kwestią jest nieliniowość - w przypadku fototranzystorów i fotorezystorów jest ona szczególnie silna, co stanowi problem w układach wymagających większej dokładności pomiaru. Co prawda istnieje możliwość zastosowania w ich miejsce fotodiody krzemowej, jednak ta w praktyce wymaga użycie wzmacniacza transimpedancyjnego.
Jak widać z przytoczonych powyżej przykładów, nawet tak pozornie nieskomplikowane zadanie, jakim jest określenie (choćby przybliżonego) poziomu jasności otoczenia wiąże się z szeregiem niedogodności lub koniecznych kompromisów. Z tego też względu producenci półprzewodników prześcigają się w coraz nowszych konstrukcjach scalonych czujników ALS, umożliwiających wygodny, dokładny i energooszczędny pomiar natężenia światła zewnętrznego.

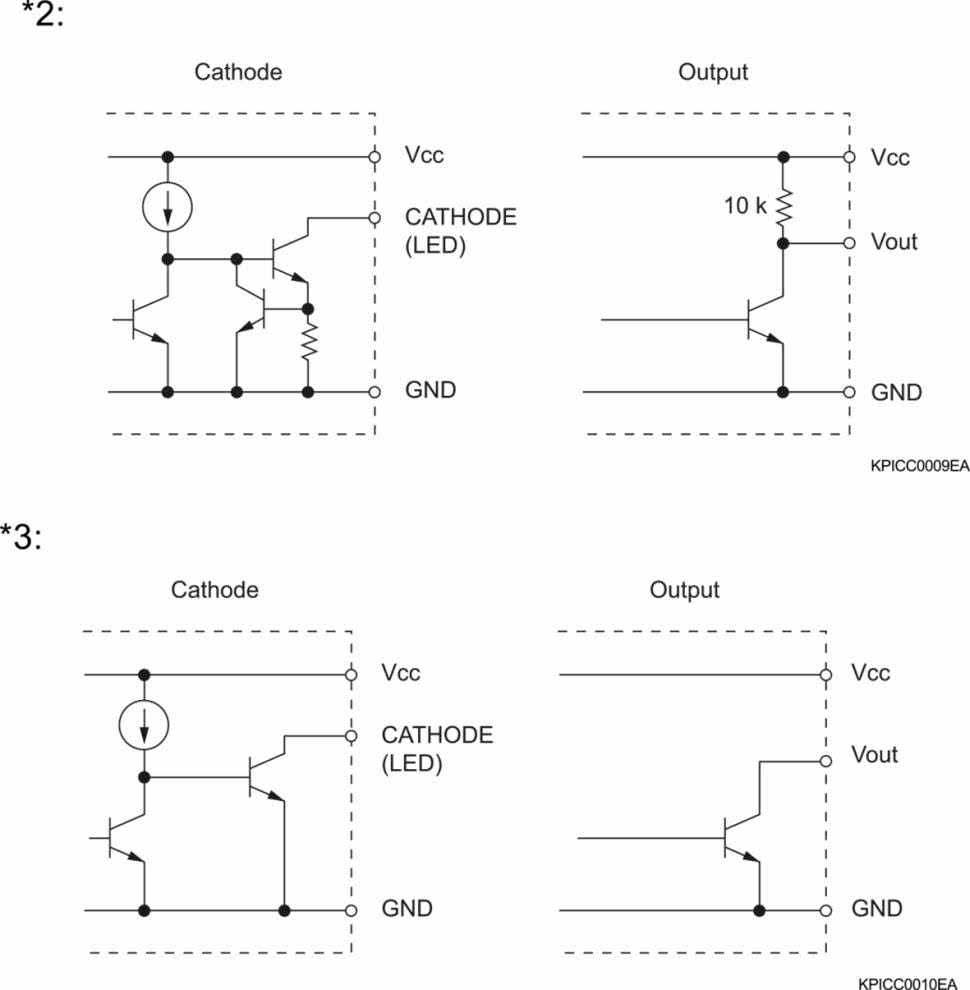
Jedną z najprostszych realizacji scalonego czujnika oświetlenia jest analogowy sensor MLX75305 firmy Melexis (fotografia 1). Układ bazuje na kaskadowym połączeniu wzmacniacza transimpedancyjnego (obsługującego zintegrowaną fotodiodę) oraz wzmacniacza wyjściowego z buforem tranzystorowym w konfiguracji otwartego drenu (rysunek 1).
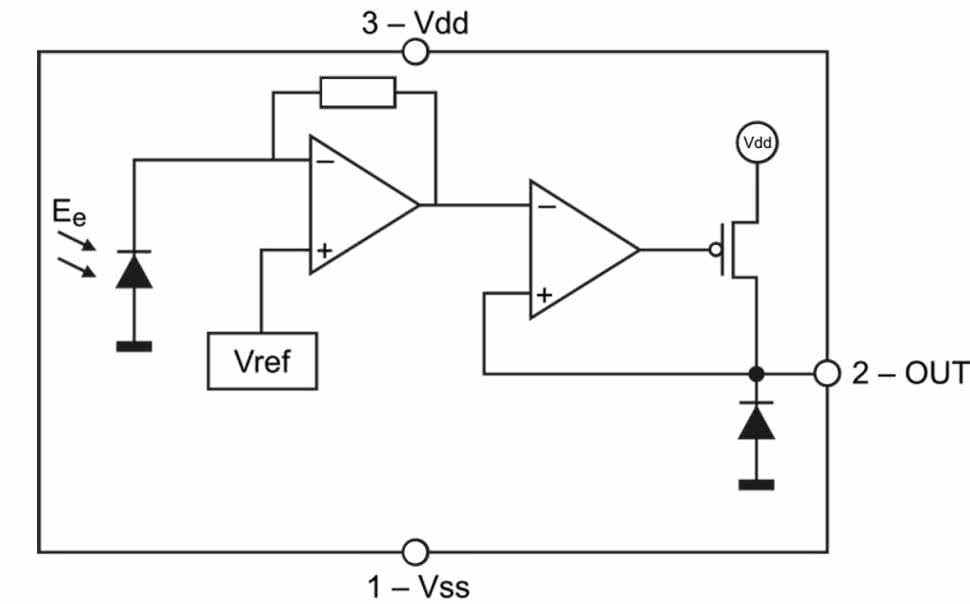
Do poprawnej pracy wymagany jest rezystor włączony pomiędzy wyjście a masę (zalecana przez producenta wartość to 10 kΩ). Układ występuje w dwóch wersjach, różniących się wzmocnieniem: 7 mV/(SμW/cm²) oraz 70 mV/(SμW/cm²). Podłużne wycięcie w obudowie typu SO-8 kształtuje obszar kątów widzenia (140° w osi długiej szczeliny i 70° w kierunku do niej prostopadłym). Warto dodać, że firma Melexis opracowała bliźniaczy układ w identycznej obudowie, charakteryzujący się jednak innym rodzajem wyjścia - zamiast wzmacniacza z „górnym” tranzystorem w konfiguracji otwartego drenu, w czujniku MLX75303 zastosowano bowiem komparator z histerezą, sterujący tranzystorem podłączonym od strony masy układu (rysunek 2).
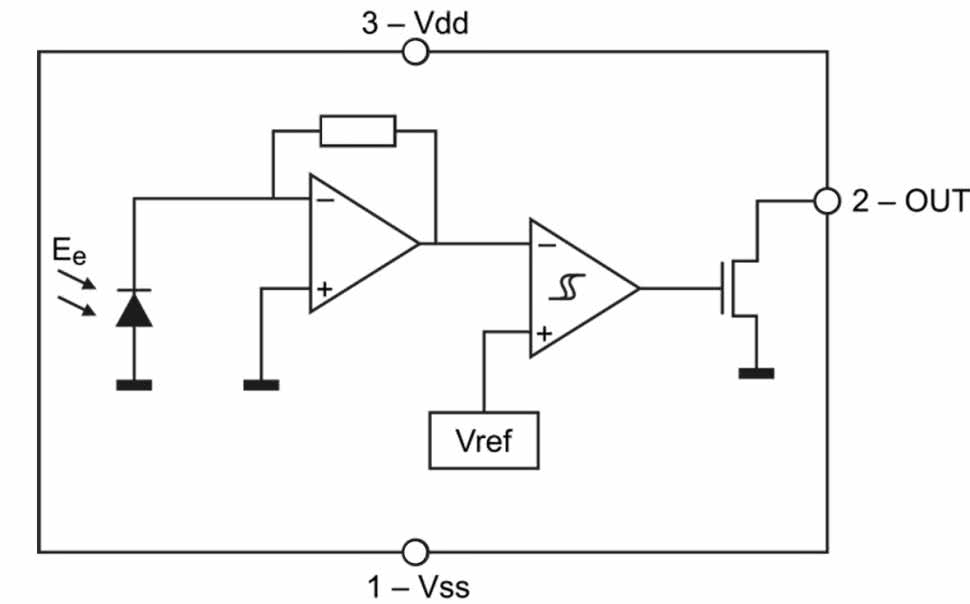
Oprócz sensorów z wyjściem liniowym lub dwustanowym na rynku można znaleźć także konwertery światło-częstotliwość, do których należy układ S9705-01DT marki Hamamatsu (fotografia 2).
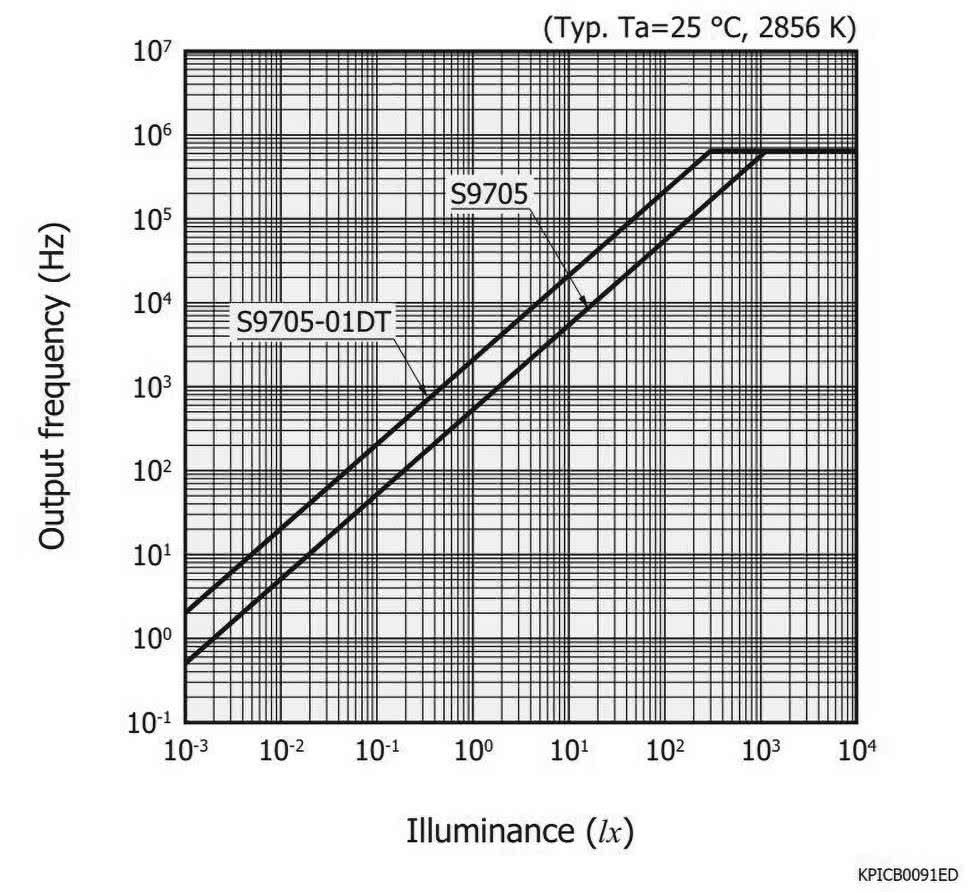
Podobnie jak MLX75305, produkt występuje także w dwóch wersjach o różnych charakterystykach wyjściowych, choć w tym przypadku nachylenie prostych jest identyczne, a modyfikacji podlega tylko sam offset zakresu mierzonej luminancji, co zobrazowano na rysunku 3.
Znacznie szerszą grupę czujników ALS stanowią układy z wyjściem cyfrowym, pracującym (w miażdżącej większości przypadków) w standardzie I²C. Na tym polu rynkowa rywalizacja odbywa się zarówno w kwestii daleko posuniętej miniaturyzacji, energooszczędności, zakresu oraz (ewentualnie) podziału charakterystyki widmowej na poszczególne pasma, jak i dostępności wbudowanych układów przetwarzania sygnałów. Jak wspomnieliśmy wcześniej, spore znaczenie ma także zakres dynamiki, wiążący się w dużej mierze z rozdzielczością wbudowanego przetwornika ADC, choć - jak pokażemy w dalszej części artykułu - także z zastosowaniem układów automatycznego przestrajania wzmocnienia (AGC), bez konieczności implementowania stosownych algorytmów po stronie hosta.
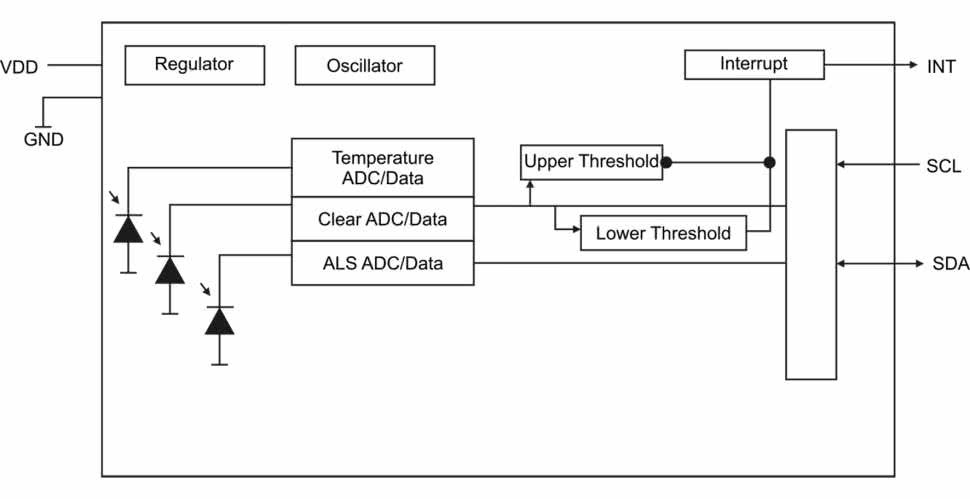
Firma Broadcom opracowała serię 20-bitowych sensorów ALS o zakresie dynamiki rzędu 18 000 000:1, zdolnych do akwizycji sygnałów na poziomie 0,01 lx. APDS-9306 (fotografia 3, rysunek 4) zawiera osobne fotodiody z filtrem optycznym (kanał ALS) i bez filtra (kanał clear) oraz kontroler z programowalnym komparatorem (wyposażonym w specjalne wyjście przerwania - INT) oraz interfejs I²C. Układ jest dostępny w dwóch wersjach obudowy o wysokości 0,34 mm oraz 0,65 mm (model z przyrostkiem -065).
Do oferty marki Vishay trafił natomiast czujnik o VEML3235SL (fotografia 4) o wymiarach 2,95×1,5×1,5 mm. Minimalne natężenie wykrywanego światła wynosi niewiele ponad 2 mlx (0,002 lx), zaś rozdzielczość przetwornika ADC to 16 bitów. Podczas pracy sensor pobiera wprawdzie 250 µA prądu zasilania, jednak wartość ta spada do zaledwie 1 µA w trybie uśpienia.
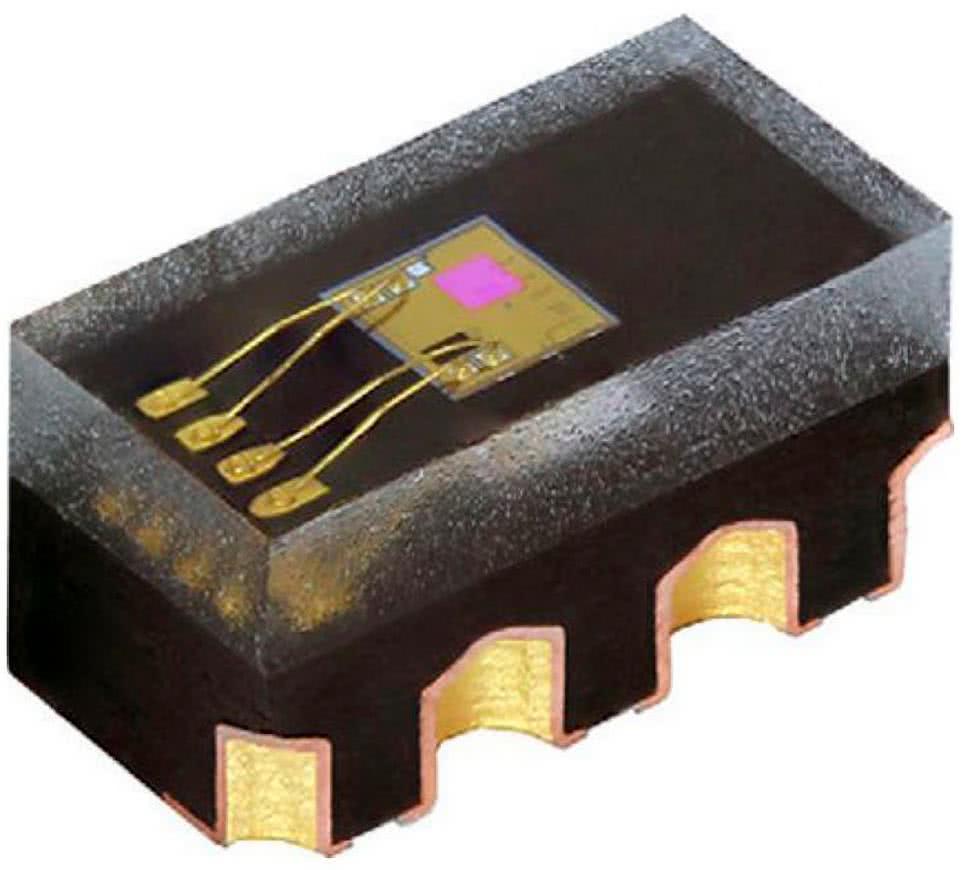
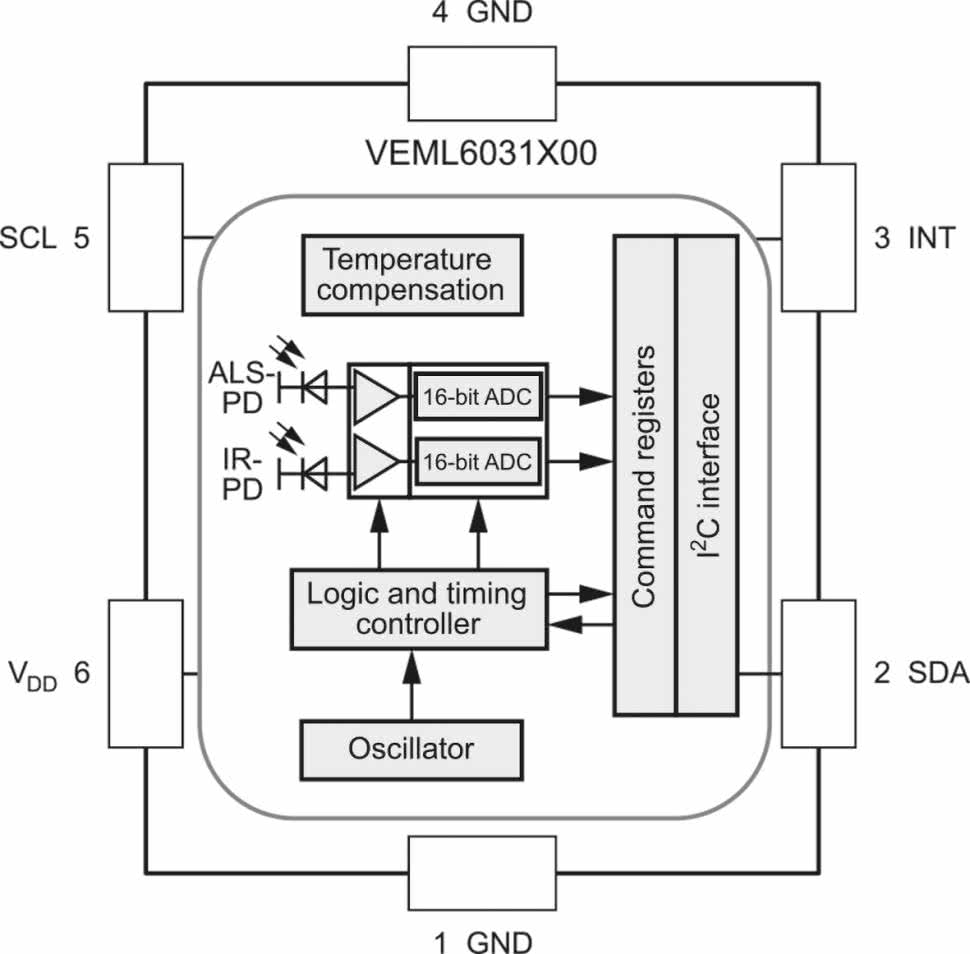
Układ VEML6031X00 (fotografia 5) oferuje już dwa niezależne tory pomiarowe, pozwalające na różnicowanie światła widzialnego oraz bliskiej podczerwieni - każda z fotodiod jest wyposażona we własny wzmacniacz oraz 16-bitowy przetwornik ADC (rysunek 5).
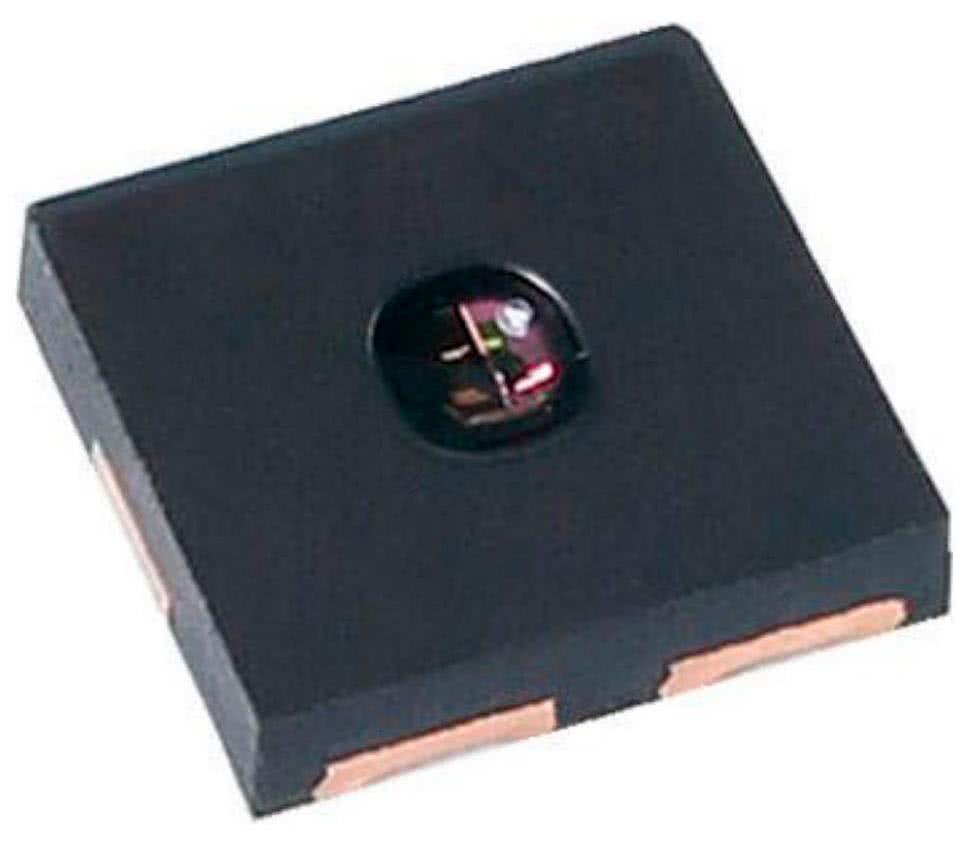
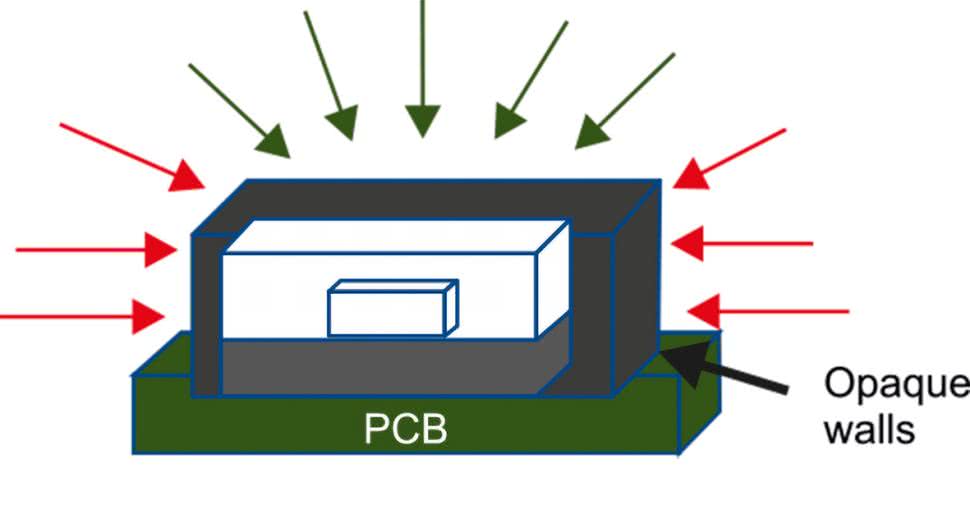
W odróżnieniu od znacznej części współczesnych czujników ALS, VEML6031X00 jest wykonany w nieprzeziernej obudowie z niewielkim oknem optycznym, co pozwala na redukcję wpływu oświetlenia padającego równolegle lub pod niewielkim kątem do płytki drukowanej (rysunek 6), dzięki czemu charakterystyka czułości kątowej została ograniczona do około ±50° (przy progu odcięcia równym połowie czułości dla światła padającego osiowo).
Jeszcze dalej poszli inżynierowie z firmy ams OSRAM, którzy opracowali układ TSL2585 (fotografia 6).
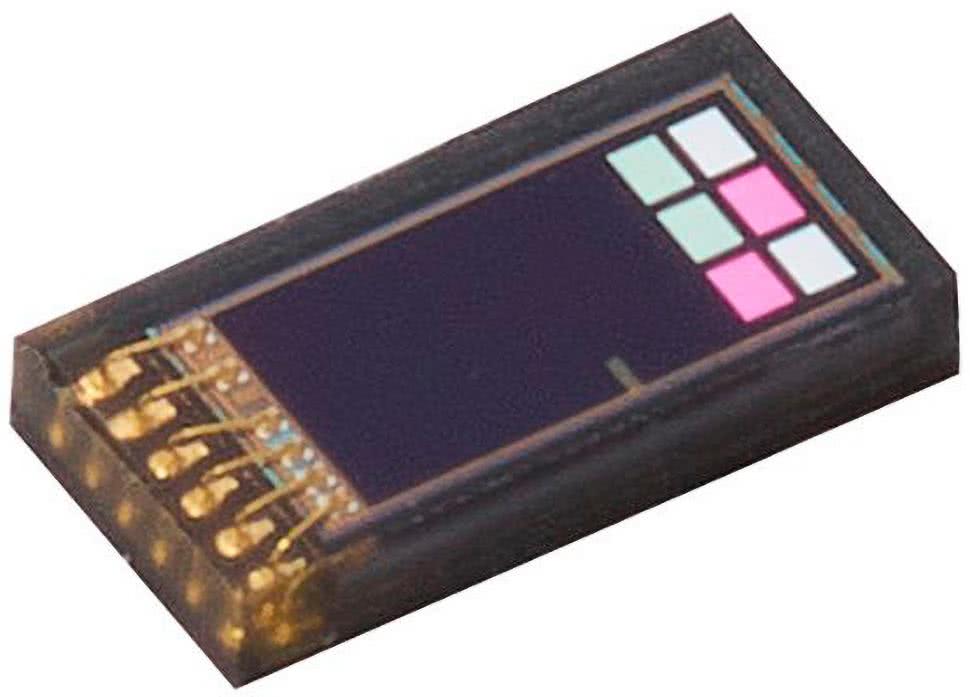
W niewielkiej, przeziernej obudowie o wymiarach zaledwie 2,0×1,0×0,35 mm znalazły się trzy fotoelementy z filtrami kształtującymi widmo optyczne w podzakresach: bliskiej podczerwieni, światła widzialnego oraz UV-A (rysunek 7).
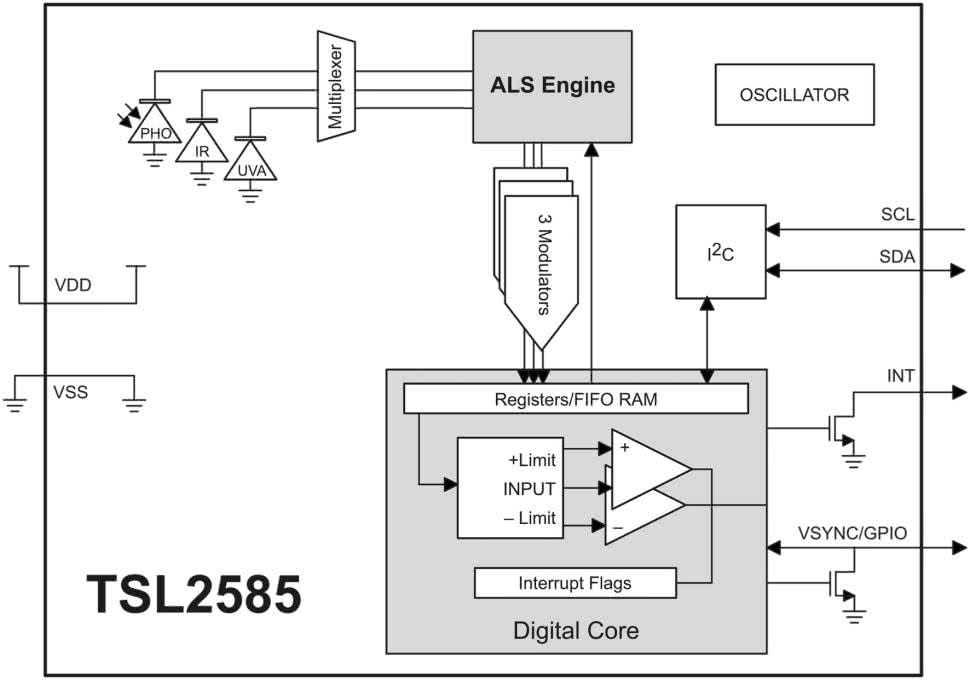
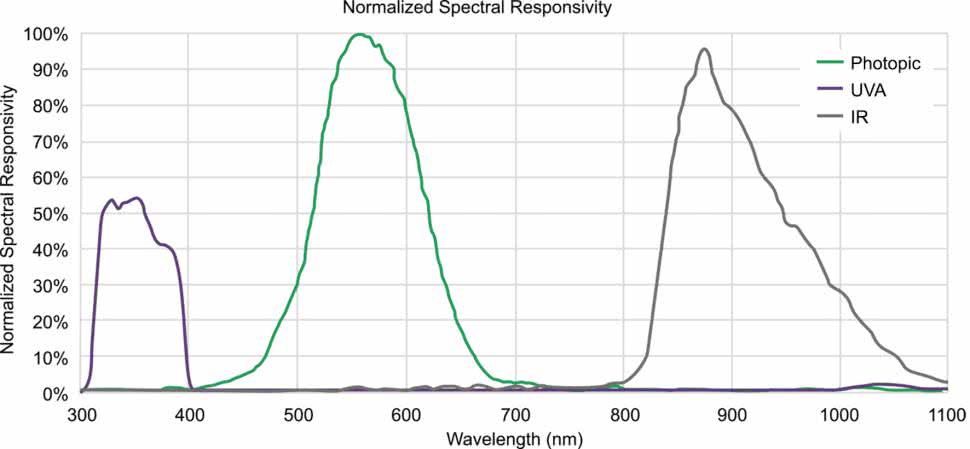
Zastosowane filtry zapewniają niemal całkowitą rozdzielność poszczególnych podzakresów pasma UV-VIS-IR (rysunek 8), co pozwala nie tylko na pomiar intensywności światła widzialnego, ale także estymację indeksu UV czy też automatyczną kontrolę ekspozycji kamery cyfrowej. W aplikacjach takich, jak ostatnia z wymienionych, cennym narzędziem będzie także funkcja pomiaru częstotliwości migotania światła w szerokim zakresie aż do 7 kHz, co pozwala znacznie lepiej ustawiać parametry urządzenia obrazującego podczas pracy przy sztucznym oświetleniu konwencjonalnym (żarowym), fluorescencyjnym czy też LED. Warto dodać, że ułożenie fotodiod przy samym brzegu obudowy układu także nie jest przypadkowe - celem takiego zabiegu jest umożliwienie realizacji projektów urządzeń mobilnych o bardzo wąskiej ramce, mającej szerokość nawet od 0,4 mm.
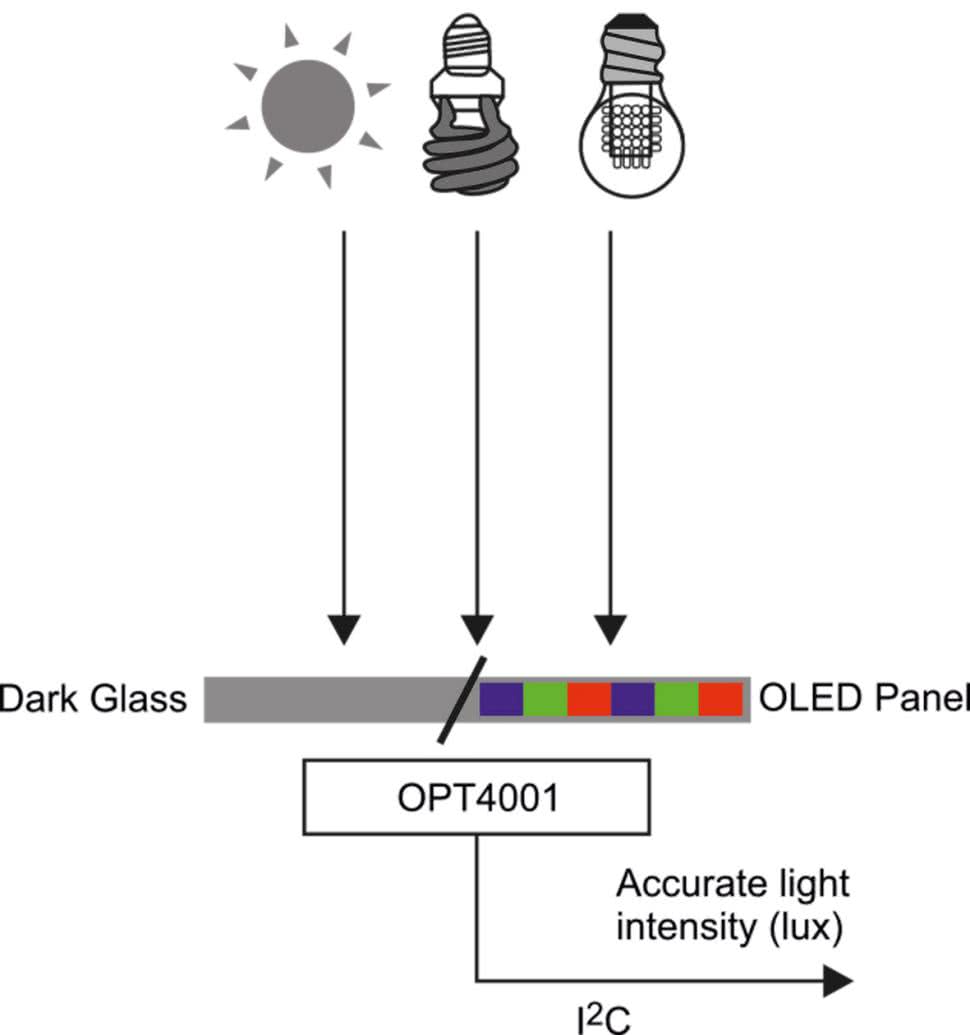
Doskonałe parametry udało się uzyskać także twórcom układu OPT4001 (Texas Instruments). Ten mikroskopijny czujnik jest dostępny w obudowach PicoStar (0,84×1,05×0,226 mm) oraz SOT-5X3 (2,1×1,9×0,6 mm) i może być zasilany napięciem w zakresie od 1,6 V do 3,6 V (przy czym wyprowadzenia I/O tolerują poziomy logiczne do 5,5 V). 28-bitowy zakres dynamiki umożliwia rejestrację natężenia światła w niezwykle szerokim zakresie, rozciągającym się już od 312,5 μlx do 83 klx (dla obudowy PicoStar) lub od 437,5 μlx do 117 klx (dla obudowy SOT-5X3) - oprócz dobrego przetwornika ADC inżynierowie Texas Instruments zastosowali także układ AGC, zapewniający automatyczny dobór optymalnego wzmocnienia stosownie do aktualnych warunków oświetleniowych. Jakby tego było mało, czujnik pobiera podczas pracy zaledwie 30 μA prądu zasilania, a wartość ta spada 15-krotnie w trybie uśpienia.

Dzięki bardzo wysokiej czułości sensor OPT4001 może pracować nie tylko za przyciemnianym szkłem (spotykanym w większości współczesnych smartfonów i innych urządzeń mobilnych), ale nawet za… samym ekranem OLED (rysunek 9). Takie rozwiązanie jest coraz bardziej pożądane przez producentów urządzeń bezramkowych (fotografia 7), dlatego sensory o podobnych osiągach można znaleźć także w ofertach innych koncernów półprzewodnikowych, np. ams OSRAM (TCS3701).
Scalone czujniki zbliżeniowe
Drugą, niezwykle szeroką grupę czujników optycznych stanowią sensory zbliżeniowe. Kategoria ta zazębia się zarówno ze scalonymi dalmierzami optycznymi, jak i z ALS oraz czujnikami koloru. W większości przypadków główna funkcjonalność czujników zbliżeniowych polega na zgrubnym, pośrednim pomiarze odległości obiektu na drodze analizy ilości światła, wygenerowanego przez diodę LED lub laser VCSEL, a następnie odbitego od przeszkody i powracającego do fotodetektora. Rzecz jasna, wiarygodny pomiar odległości w konkretnej jednostce (np. milimetrach lub calach) nie byłby możliwy na podstawie samego tylko natężenia odbitej wiązki promieniowania (każdorazowo należałoby bowiem uwzględnić reflektancję obiektu, jego geometrię, wpływ ewentualnych przeszkód dodatkowych - głównie w postaci szkła osłonowego itp.), jednak nie to jest celem stosowania takich czujników - chodzi głównie o stwierdzenie samego faktu pojawienia się przeszkody w pewnym zakresie odległości od czujnika oraz względnych zmian tejże odległości. Pomimo to, rejestry wyjściowe optycznych czujników zbliżeniowych umożliwiają odczyt wartości wyjściowej przetwornika ADC, co - przy zastosowaniu odpowiednio ustawionych progów detekcji - umożliwia wykrycie np. faktu przyłożenia telefonu do ucha użytkownika podczas rozmowy telefonicznej. To zaś pozwala na automatyczne wyłączenie ekranu - stąd też w konstrukcjach produkowanych obecnie sensorów zbliżeniowych można zauważyć szereg cech ułatwiających ich aplikację w urządzeniach mobilnych.
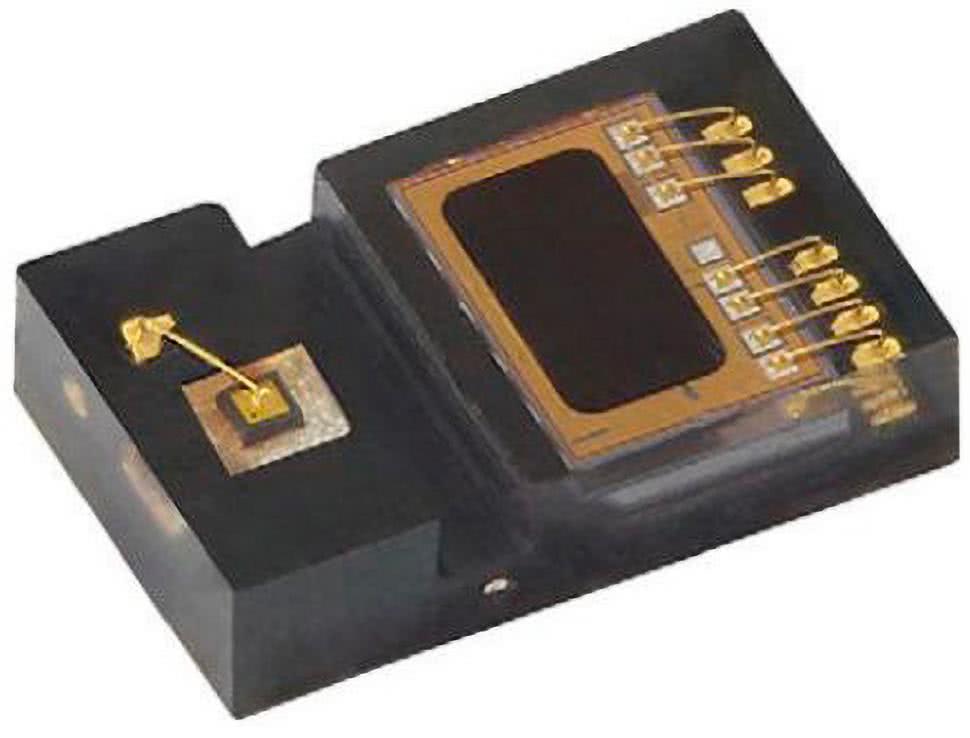
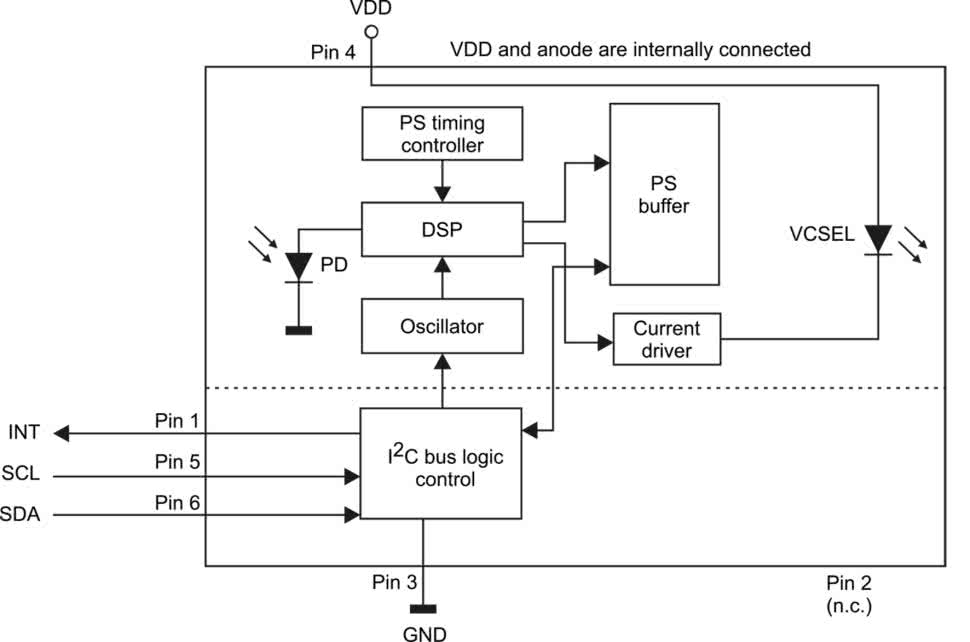
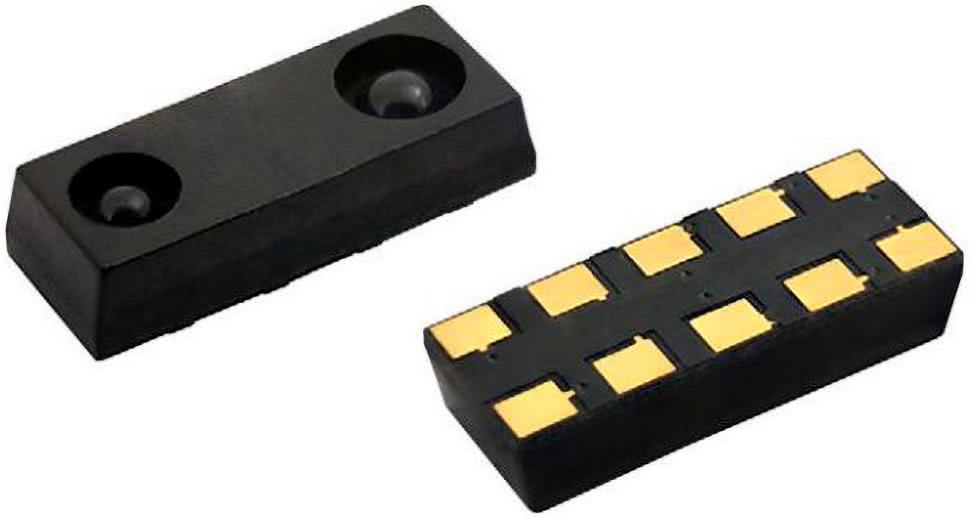
Dobrym przykładem nowoczesnego, subminiaturowego czujnika zbliżeniowego jest układ VCNL36825T marki Vishay (fotografia 8), bazujący na nadajniku w postaci diody VCSEL oraz czułym odbiorniku, umieszczonym wraz z układem sterującym w oddzielonym optycznie przedziale obudowy. Całość ma zaskakująco kompaktowe wymiary (zaledwie 2,0×1,25×0,5 mm), a rozstaw elementów optoelektronicznych pozwala na pracę czujnika za pojedynczym okienkiem optycznym o średnicy 1,6 mm. W mikroskopijnej strukturze układu znalazł się procesor DSP, oscylator, kontroler z interfejsem I²C oraz źródło prądowe do sterowania diodą laserową, zaś dodatkowo (czego nie widać na uproszczonym schemacie z rysunku 10) konstruktorzy przewidzieli także kompensację temperatury otoczenia w zakresie od -40 do +85°C. Czujnik radzi sobie także z kompensacją światła słonecznego w zakresie aż do 100 klx.

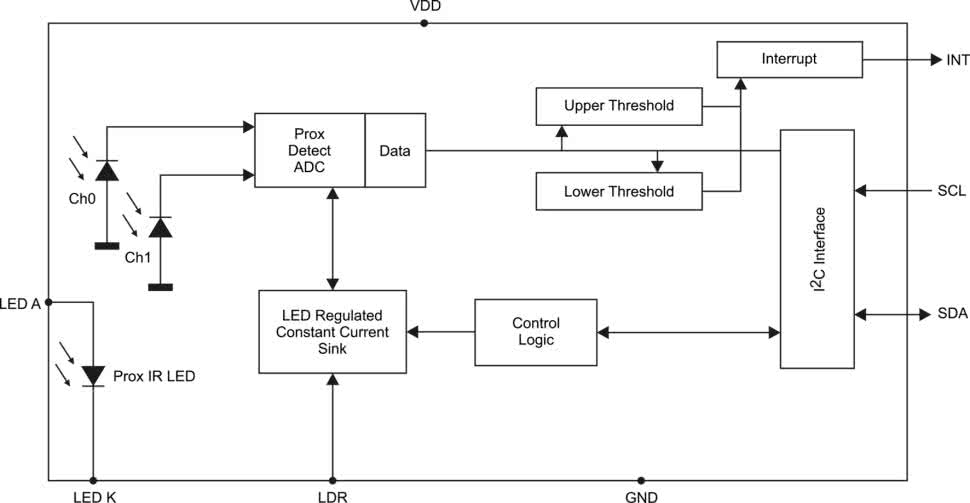
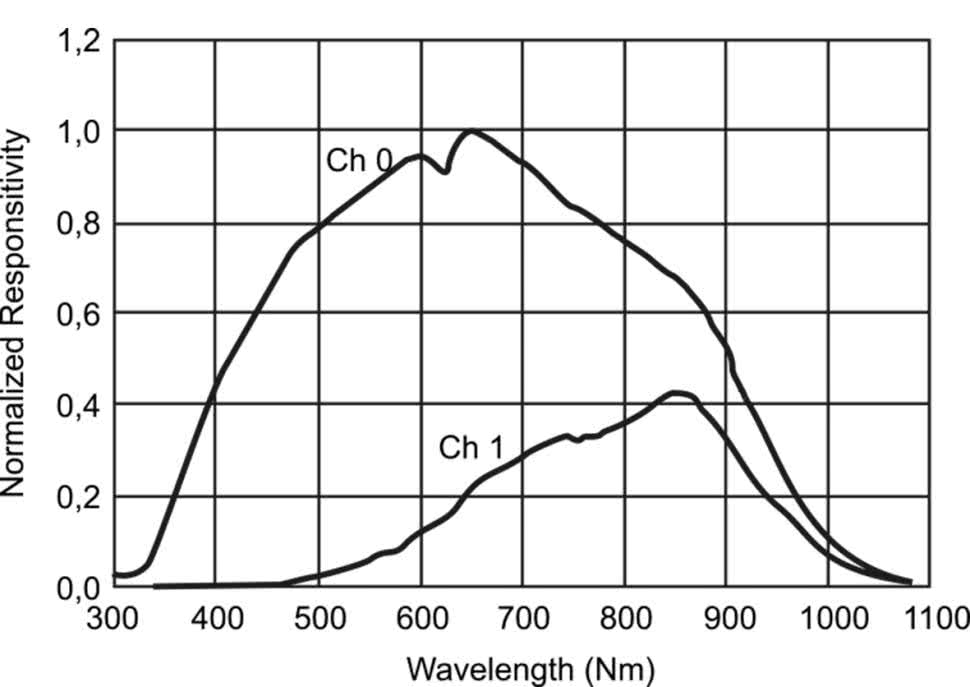
Układ APDS-9190 (fotografia 9) zawiera w swojej strukturze dwie fotodiody (rysunek 11) - pierwszy z kanałów (Ch0) odpowiada za szerokopasmowy pomiar natężenia światła w zakresie zahaczającym nawet o ultrafiolet i bliską podczerwień, zaś drugi (Ch1) jest czuły głównie na promieniowanie podczerwone (z pikiem czułości spektralnej około 850 nm) - patrz rysunek 12.
Co ciekawe, czujnik zapewnia fabryczną kalibrację dla odległości od standardowej przeszkody (szara karta Kodak o reflektancji 90%) równej 100 mm, dzięki czemu wytwórcy urządzeń docelowych nie muszą martwić się o indywidualną kalibrację każdego urządzenia na etapie produkcji. W przypadku powtarzalnych warunków instalacji sensora (grubość szkła osłonowego, jego przezierność, odległość od czujnika i wynikający z niej poziom przesłuchów, średnica otworu okna optycznego, rodzaj i obecność dodatkowych „izolatorów” optycznych, itd.) raz ustalony poziom czułości może być bowiem programowany we wszystkich produktach i to (przynajmniej teoretycznie) bez dodatkowych czynności korekcyjnych. Zakres dynamiki czujnika APDS-9190 wynosi 2000:1.
Czujniki zbliżeniowe na bazie odbiorników IR
Warto dodać, że w przypadku aplikacji o znacznie luźniejszych wymogach dotyczących miniaturyzacji, często lepszym rozwiązaniem - w porównaniu do scalonych sensorów zbliżeniowych - może być zastosowanie nieco bardziej złożonego układu, zawierającego scalony odbiornik podczerwieni oraz dyskretny nadajnik IR.
W najprostszej realizacji czujnik może być złożony z klasycznego odbiornika, stosowanego w systemach zdalnego sterowania oraz zwykłej diody nadawczej IR. Takie zestawienie pozwala uzyskać zasięg rzędu nawet kilku metrów, choć rzeczywiste osiągi zależą oczywiście od mocy i zbieżności wiązki podczerwieni, rozmiaru i reflektancji obiektu (przeszkody), kąta ustawienia przeszkody względem osi optycznej czujnika, a także obecności zakłóceń w otoczeniu pracującego urządzenia (problematyczne są zwłaszcza lampy fluorescencyjne).
Firma Vishay opracowała nawet specjalną wersję odbiorników IR o bardzo podobnej konstrukcji, ale nieco innym sposobie obsługi wewnętrznego tranzystora wyjściowego. Przykładem odbiornika dostosowanego stricte do aplikacji zbliżeniowych może być czujnik TSSP4P38 (fotografia 10).

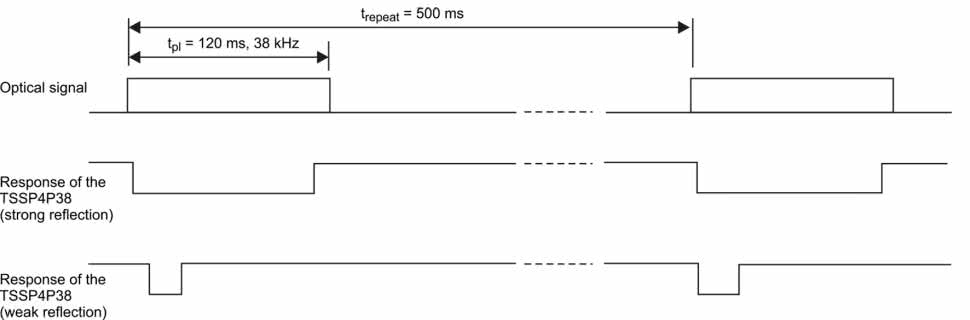
W tym przypadku długość impulsu wyjściowego nie odpowiada już rzeczywistemu czasowi trwania paczki impulsów świetlnych (co jest warunkiem koniecznym w systemach zdalnego sterowania) - impuls jest bowiem tym dłuższy, im silniejsza jest wiązka odbita, powracająca do fotodetektora (rysunek 13).
Umożliwia to różnicowanie względnej odległości (czyli - innymi słowy - zmian dystansu pomiędzy przeszkodą a czujnikiem), co byłoby niemożliwe do określenia w przypadku klasycznych odbiorników, stosowanych np. w systemach sterowania z użyciem kodu RC-5. Dla porównania warto spojrzeć na rysunek 14, zaczerpnięty z noty katalogowej takiego tradycyjnego odbiornika z serii TSOP22../24../44../48.. marki Vishay.

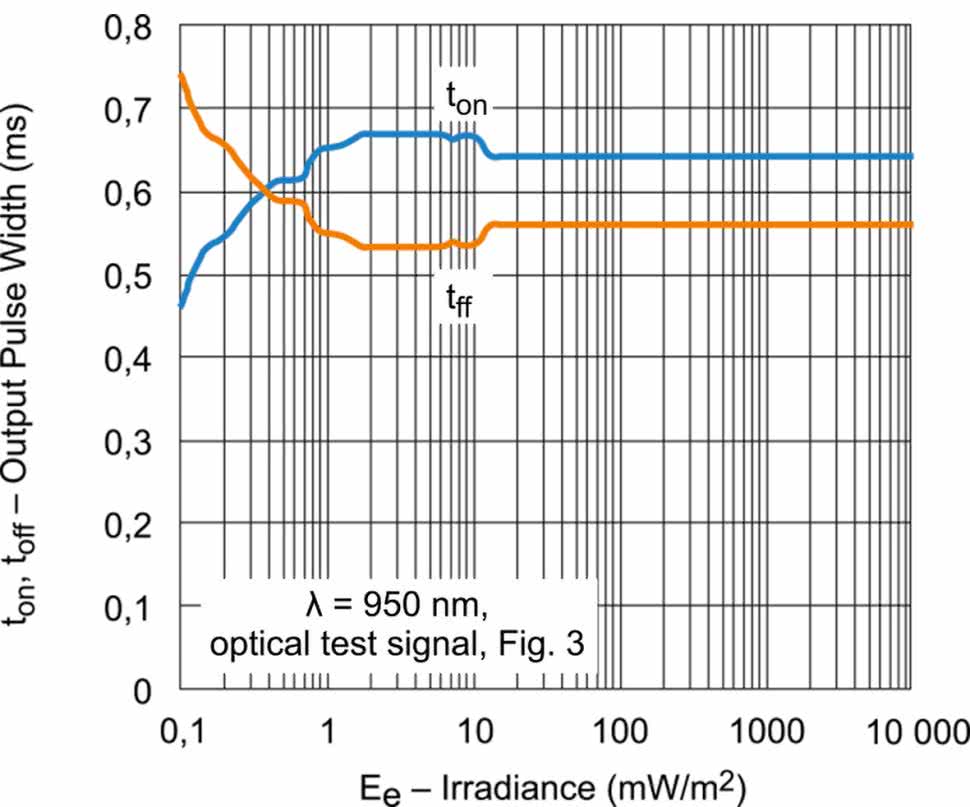
Jak widać, czasy trwania impulsów wyjściowych odpowiadają paczkom impulsów optycznych, choć rzeczywiste timingi mogą zmieniać się w pewnym zakresie, jeżeli odbiornik pracuje z bardzo słabymi sygnałami (rysunek 15).
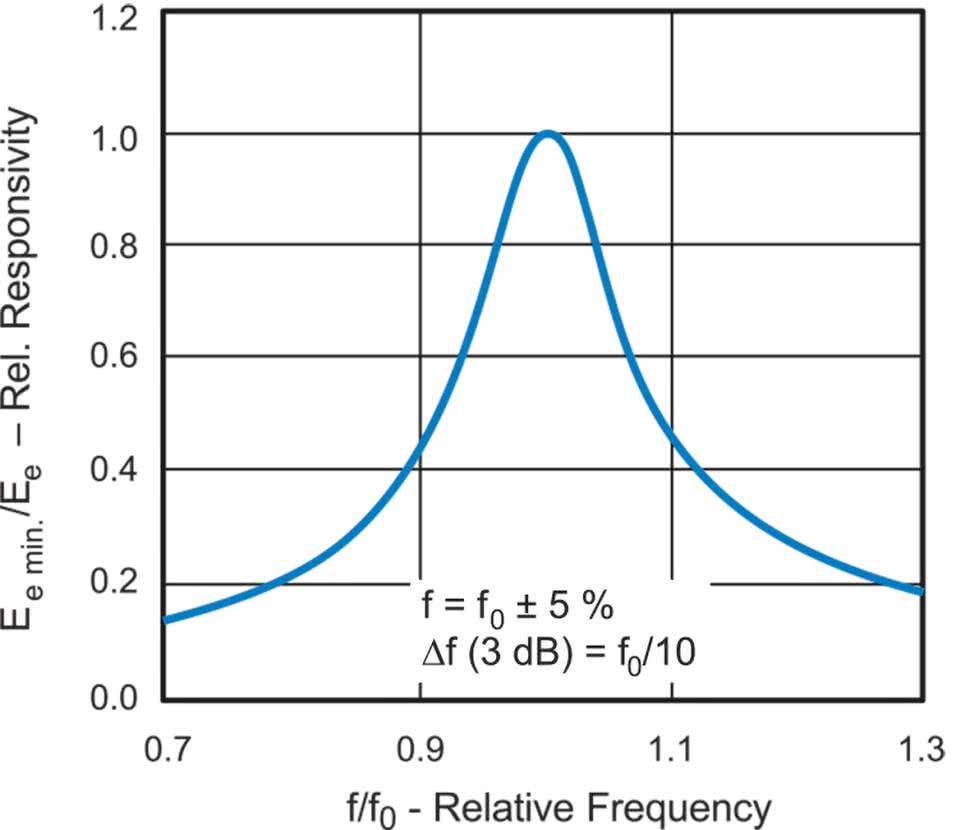
Warto zatem zwracać baczną uwagę na docelowy zakres zastosowań danego odbiornika, gdyż w identycznych obudowach występują czujniki dostosowane do zupełnie różnych celów - mimo iż nawet częstotliwość fali nośnej obsługiwanych przez nie wiązek podczerwieni (38 kHz) oraz selektywność (rysunek 16) są takie same.
Popularność i niewielki koszt opisanej powyżej konstrukcji czujnika zbliżeniowego sprawiły, że firma Vishay wdrożyła do sprzedaży tworzywową obudowę, odporną na temperatury lutowania i mieszczącą odbiornik podczerwieni oraz diodę nadawczą LED IR o średnicy 3 mm (rysunek 17, fotografia 11).
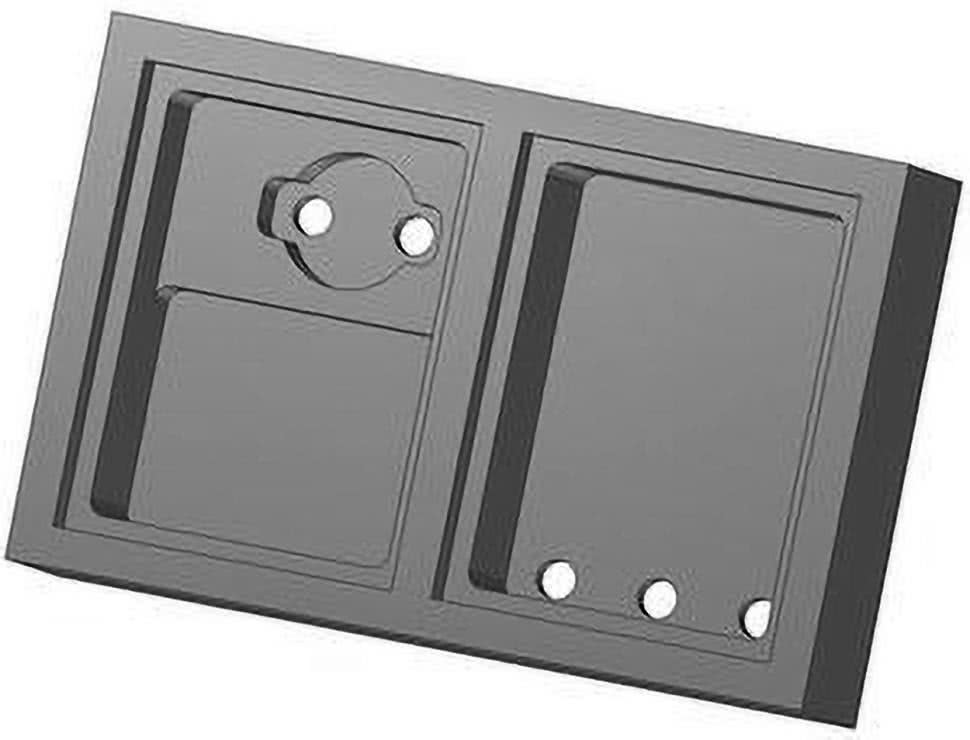
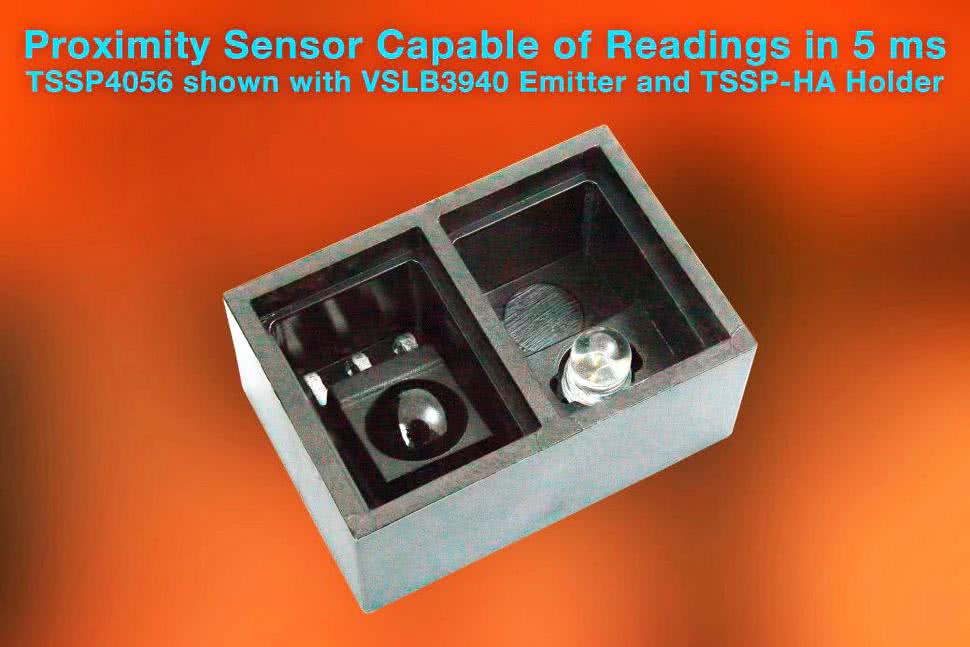
Ten nieskomplikowany element doskonale spełnia swoją funkcję jako skuteczna bariera optyczna, chroniąca odbiornik przed bezpośrednim przesłuchem z diody nadawczej. Warto także dodać, że w ofercie Vishay pojawił się również miniaturowy czujnik TSSP57P38 o podobnych parametrach, ale nieporównanie mniejszej obudowie SMD (fotografia 12), której wymiary to zaledwie 3,95×3,95×0,8 mm.

Wspólną wadą detektorów opartych na odbiornikach modulowanej podczerwieni jest konieczność zapewnienia przez projektanta odpowiedniego sygnału sterującego nadajnikiem IR. Choć nie stanowi to większego problemu w przypadku zaawansowanych mikrokontrolerów, to mimo wszystko implementacja wspomnianej funkcjonalności wymaga użycia przynajmniej jednego timera sprzętowego - projekty bazujące na najprostszych MCU (AVR, mniejsze modele PIC czy MSP430) mogą więc przy tym nieco „ucierpieć”. W takich sytuacjach dobrym wyjściem okaże się zastosowanie scalonego sensora zawierającego wyjście sterujące diodą LED.
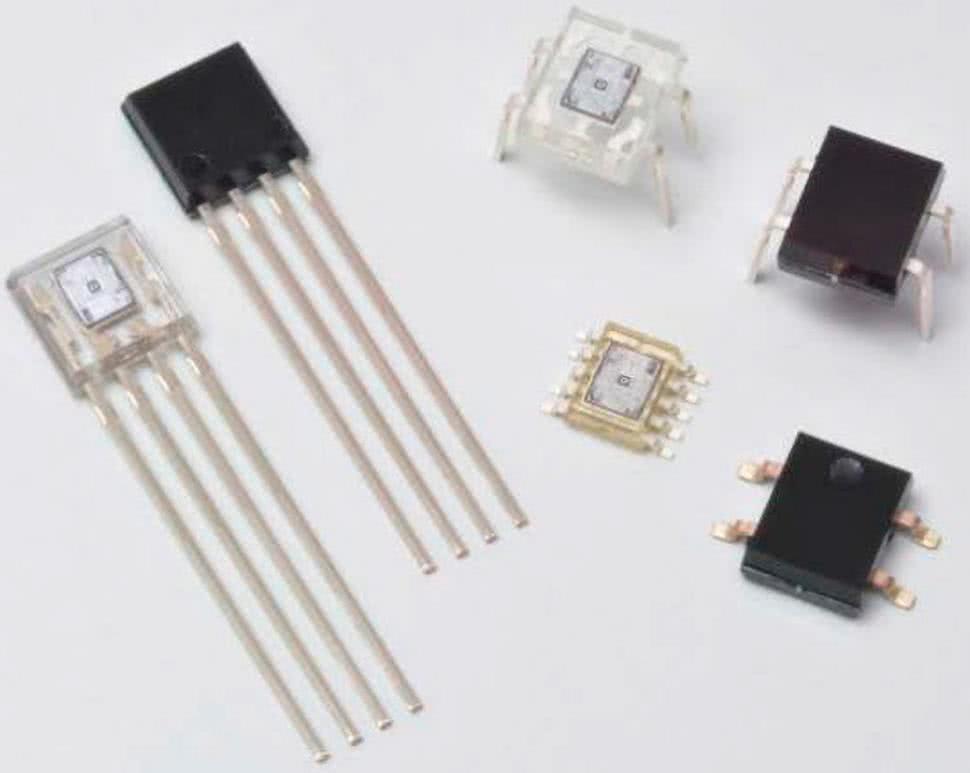
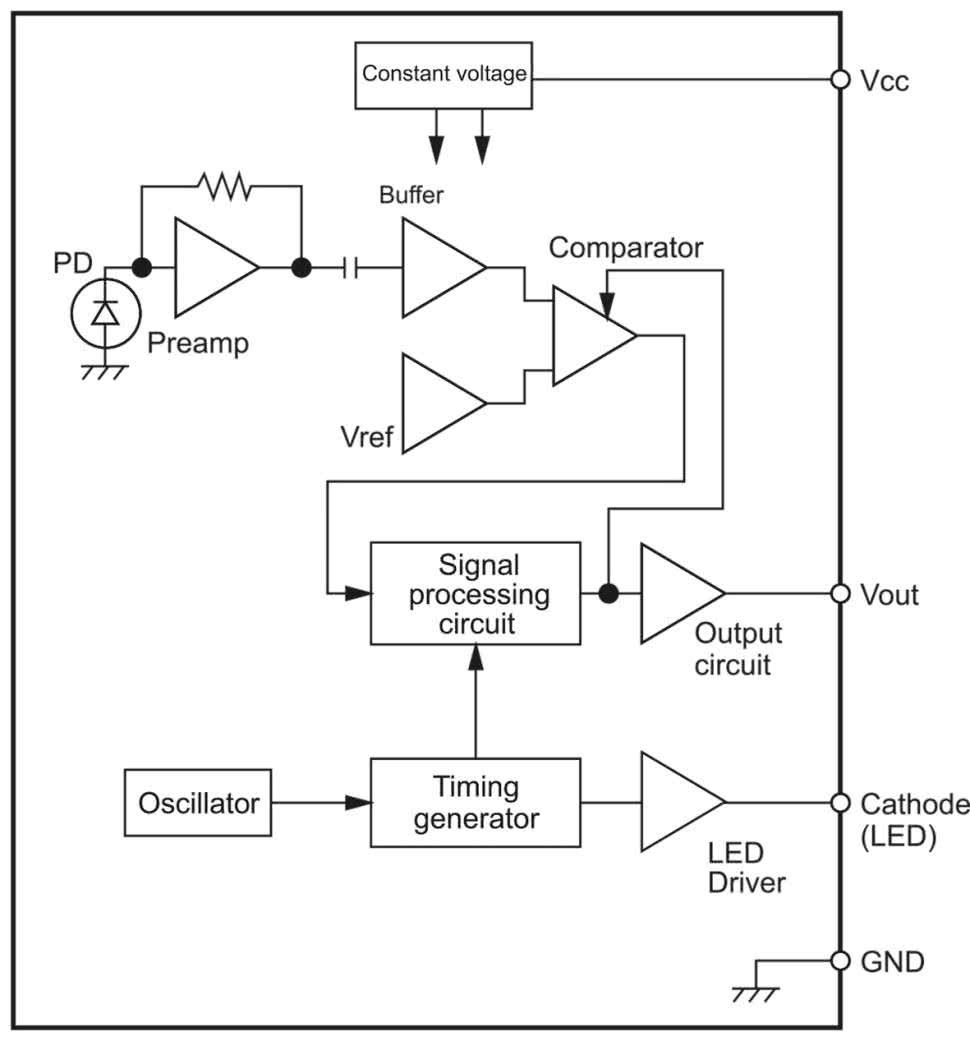
Firma Hamamatsu opracowała serię takich układów o oznaczeniach S4282-51, S6809, S6846, S6986, S7136/-10 oraz S10053/-01DT (fotografia 13) - każdy z nich zawiera wbudowaną fotodiodę ze wzmacniaczem transimpedancyjnym, tor przetwarzania sygnałów z komparatorem oraz oscylator i układ czasowy, zsynchronizowany z driverem nadajnika (rysunek 18).
Oprócz sporego zróżnicowania dostępnych obudów, układy z opisywanej serii występują również w wersjach o rozmaitych typach wyjścia sterującego diodą nadawczą (rysunek 19).
Czujniki zintegrowane (ALS + proximity)
Jak już podkreśliliśmy wcześniej, współczesne urządzenia mobilne korzystają zarówno z czujników natężenia oświetlenia (ALS), jak i z sensorów zbliżeniowych (proximity sensor). Wysoce pożądane okazuje się zatem połączenie obydwu tych funkcjonalności w ramach tego samego układu scalonego, co nie tylko upraszcza podłączenie i montaż w oknie optycznym (lub pod wyświetlaczem), ale także znakomicie redukuje ilość zajętego miejsca na PCB. Poniżej zaprezentujemy kilka reprezentatywnych przykładów tego typu rozwiązań zintegrowanych.

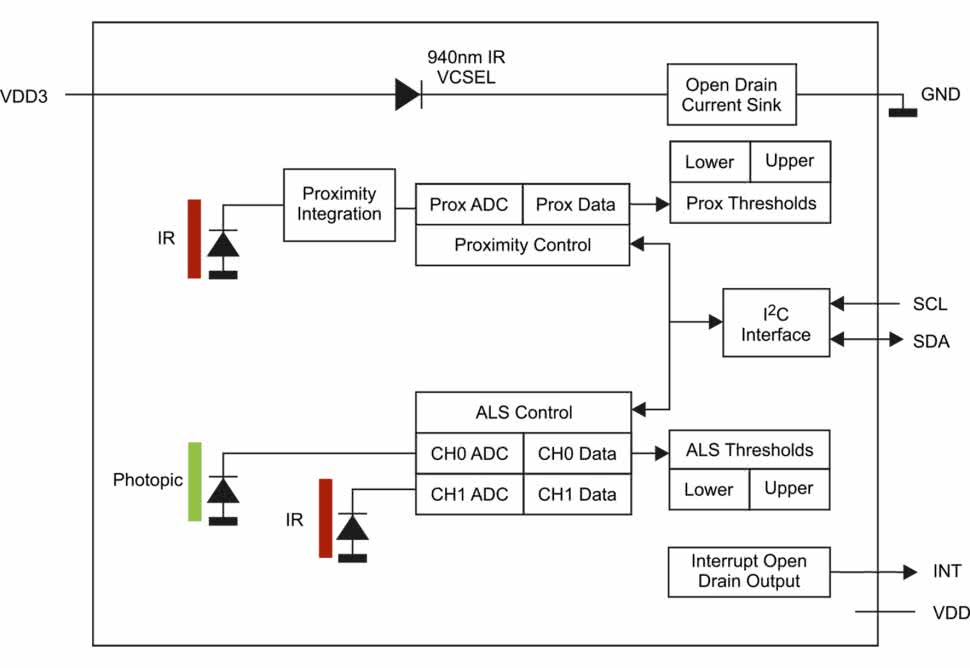
Układ TMD2712 to propozycja czujnika zbliżeniowego z funkcją pomiaru natężenia światła otoczenia, opracowana przez firmę ams OSRAM. Miniaturowy układ (jak chwali się producent - najmniejszy spośród tego typu czujników, dostępnych obecnie na rynku) ma wymiary 1,0×2,0×0,5 mm (fotografia 14) i - co ciekawe - w swojej strukturze zawiera aż trzy osobne fotodiody z indywidualnymi przetwornikami ADC: jedna z nich jest wyposażona w filtr IR i służy do pomiaru odległości (przy współpracy z 940-nanometrowym laserem VCSEL), zaś dwie pozostałe - z filtrami podczerwieni oraz światła widzialnego (tzw. filtr fotopowy - photopic filter) odpowiadają za pomiar światła otoczenia (rysunek 20). Do obydwu funkcjonalności użytkownik może przypisać progi (górny i dolny), po przekroczeniu których pojawi się sygnał aktywny na wyjściu INT. Warto dodać, że rejestr o nazwie PERS (persistence) pozwala wybrać, ile następujących po sobie próbek (z kanału ALS lub proximity) musi wystąpić, by przerwanie mogło zostać zgłoszone.
Firma Vishay opracowała miniaturowy czujnik zbliżeniowy zintegrowany z sensorem ALS. Układ VCNL4200, zamknięty w obudowie o wymiarach 8,0×3,0×1,8 mm (fotografia 15), jest w stanie wykrywać obiekty umieszczone w odległości maksymalnej 150 cm od czujnika i - podobnie, jak TMD2712 - także oferuje konfigurowalną funkcję persistence, dyskryminującą zakłócenia w postaci krótkich impulsów świetlnych z otoczenia.
Czujniki gestów (2D/3D)
Od prostszych czujników zbliżeniowych już tylko krok do bardziej zaawansowanych interfejsów człowiek-maszyna - coraz większą popularność w nowoczesnych systemach multimedialnych (w tym także motoryzacyjnych), urządzeniach mobilnych, a nawet wielu aplikacjach profesjonalnych zyskują rozmaite czujniki gestów. Istnieje kilka technik, umożliwiających realizację takiej funkcjonalności - najczęściej spotykane są czułe układy pojemnościowe oraz optyczne, choć można także znaleźć przykłady urządzeń opartych na radarach mikrofalowych.
U źródeł optycznej detekcji gestów leży tak naprawdę rejestracja położenia (a raczej - zmian położenia) ręki użytkownika w pobliżu czujnika, dokonywana poprzez porównanie ilości światła odbitego od ręki i powracającego do kilku odpowiednio rozdzielonych przestrzennie fotodetektorów. Pewną modyfikacją tej metody jest zastosowanie zestawu multipleksowanych nadajników (diod LED), które - rozmieszczone wokół monitorowanego obszaru i włączane kolejno - umożliwiają uzyskanie analogicznych wyników detekcji gestów, jak w przypadku zestawu osobnych fotoelementów.

Dobrym przykładem może być tutaj czujnik APDS-9960 (fotografia 16). Układ jest wyposażony w osiem fotodiod - cztery przeznaczone do pomiaru natężenia oraz koloru oświetlenia zewnętrznego (fotoelementy z filtrami czerwonym, zielonym i niebieskim oraz czwarty pozbawiony filtrów) oraz cztery kierunkowe (góra/dół/prawo/lewo) - patrz rysunek 21.
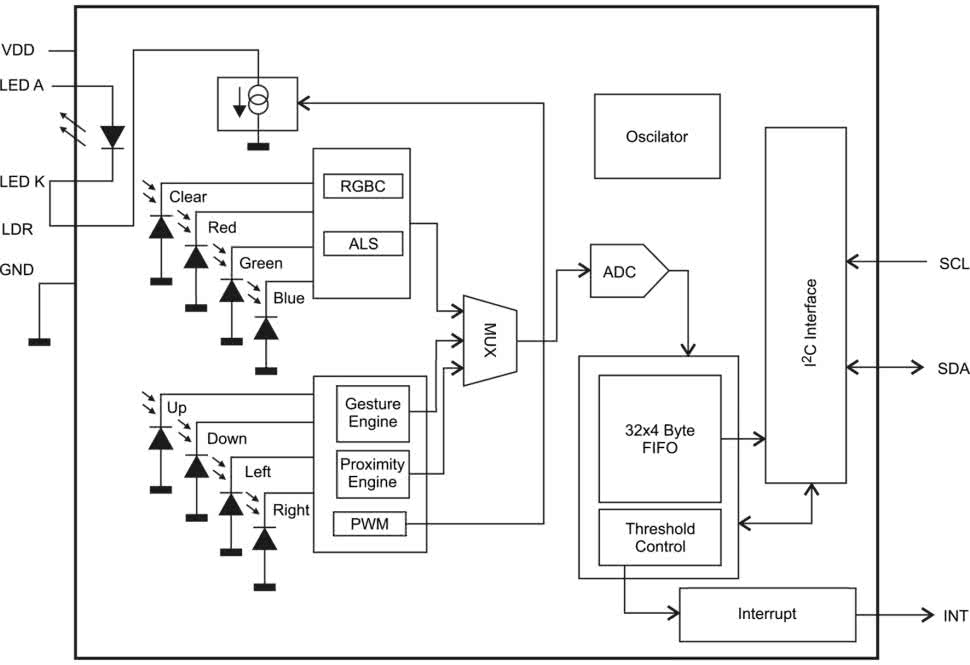
W strukturze znalazł się także impulsowy sterownik oświetlacza (z możliwością przełączenia na zewnętrzną diodę LED) oraz FIFO o rozmiarze 32×4 bajty. Zasada wykrywania gestów opiera się na porównaniu fazy i amplitudy sygnałów, pochodzących z fotodiod kierunkowych. Rysunek 22 pokazuje przebiegi wyjściowe fotoelementów oraz ich fizyczne ułożenie w strukturze czujnika. Z uwagi na obecność soczewki odwracającej, jako pierwsza reaguje na światło odbite ta fotodioda, w kierunku której użytkownik wykonuje ruch. Przykładowo - podczas ruchu z góry na dół najwcześniej odpowiada czujnik umieszczony właśnie na dole, po nim - fotodiody prawa i lewa, zaś na samym końcu - fotodioda górna. W przypadku ruchu z lewej na prawą stronę najwcześniej reaguje detektor prawy, najpóźniej - lewy. Warto przy tym zauważyć, że (przynajmniej w idealnych warunkach, czyli wtedy, gdy obiekt przesuwa się osiowo względem środka soczewki), amplitudy sygnałów z diod górnej/dolnej oraz prawej/lewej są bardzo zbliżone, przy czym fotoelementy leżące na osi równoległej do kierunku ruchu odpowiadają sygnałem wyraźnie silniejszym niż te leżące na osi prostopadłej.
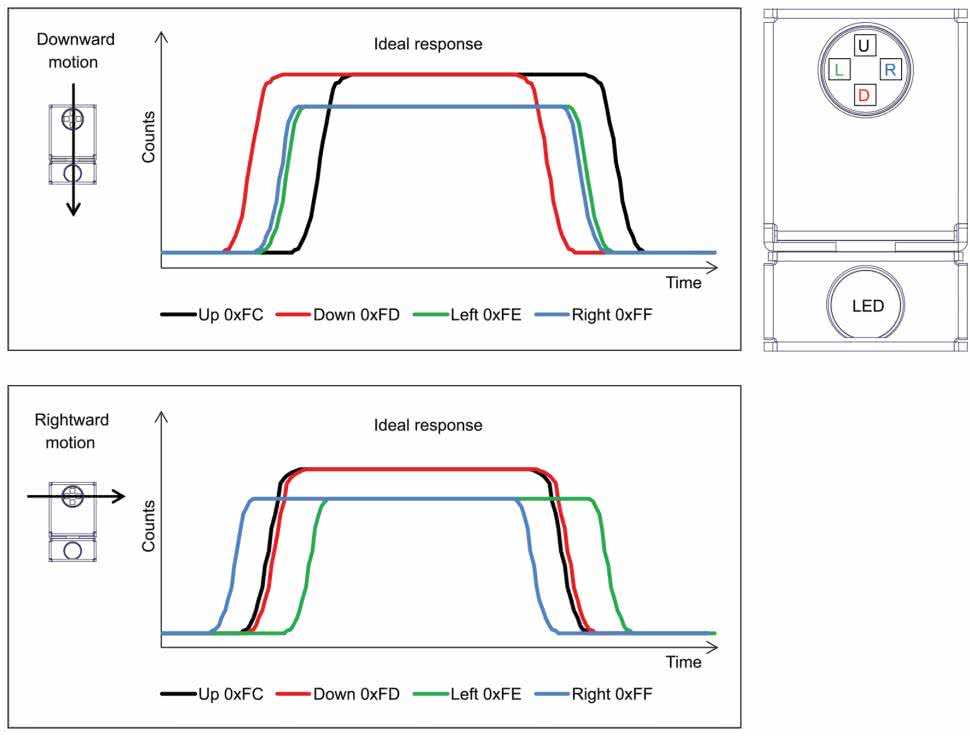
Większe możliwości - ale kosztem bardziej rozbudowanego oprogramowania zaimplementowanego w nadrzędnym procesorze - daje zastosowanie układów bazujących na niewielkich matrycach (przetwornikach obrazu). Układ MAX25405 zawiera w swojej strukturze 60-pikselową macierz fotoelementów (ułożonych w prostokącie 6×10 px) oraz zsynchronizowany z nią sterownik zewnętrznego oświetlacza LED (rysunek 23).
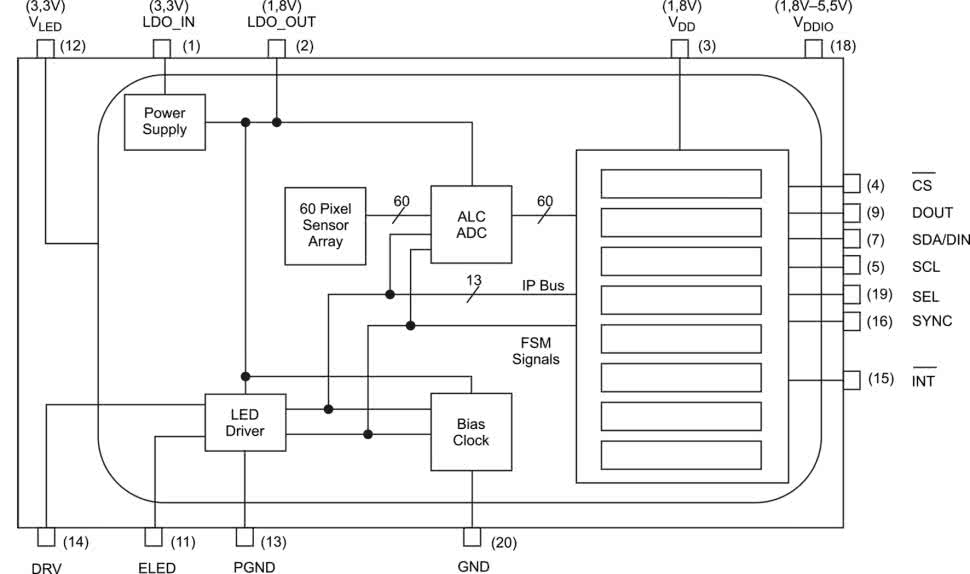
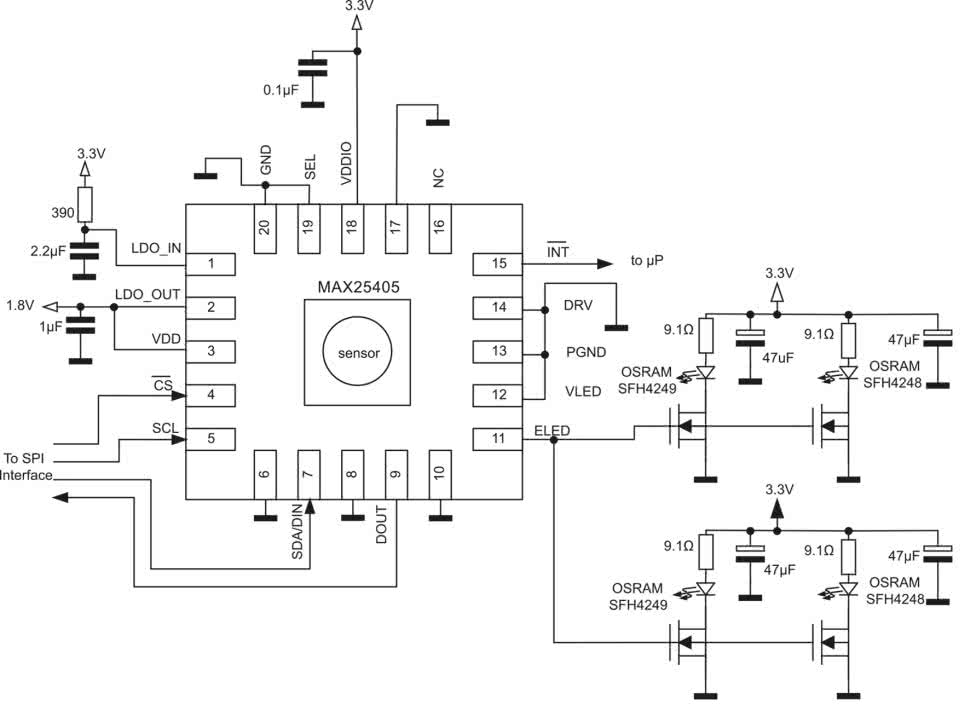
W zależności od potrzeb konstruktor może wykorzystać wewnętrzne wyjście prądowe, dostępne na linii DRV (podłączając doń katodę diody LED) lub użyć wyjścia ELED do sterowania zewnętrznymi tranzystorami MOSFET (rysunek 24).

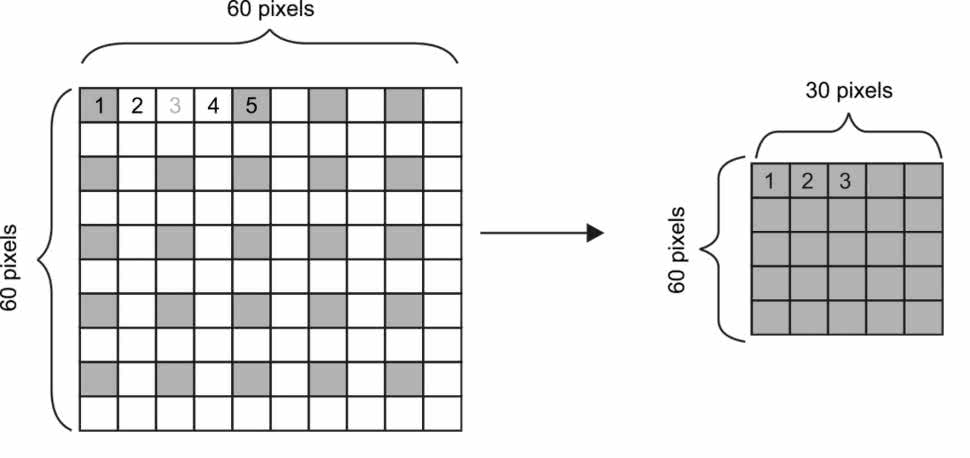
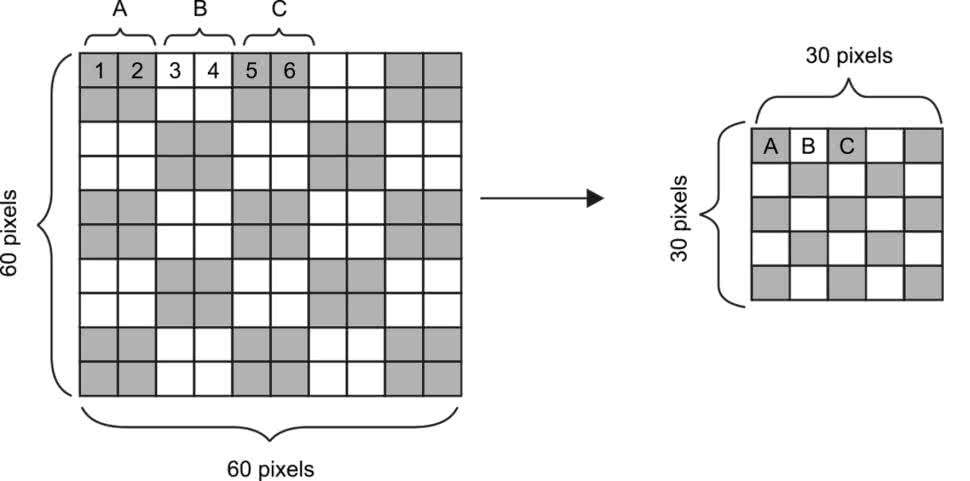
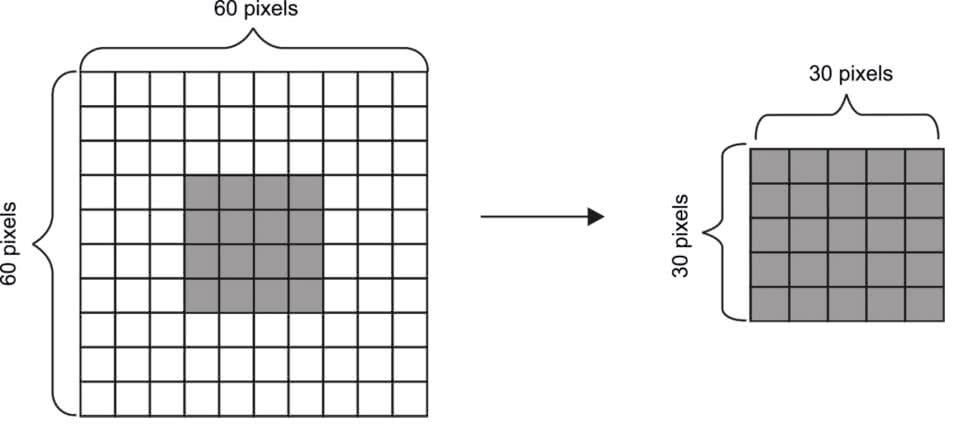
Znacznie prostszą implementację umożliwiają czujniki gestów wyposażone we wbudowany procesor sygnałowy, odpowiedzialny za interpretację obrazu uzyskiwanego z macierzy fotodiod. Układ APDS-9500 (fotografia 17, rysunek 25) zawiera matrycę o zaskakująco wysokiej (jak na „prosty” czujnik optyczny) rozdzielczości 60×60 pikseli, obsługiwaną przez 9-bitowy przetwornik ADC i zaawansowany procesor DSP, zapewniający komplet gotowych algorytmów ekstrakcji obiektów i rozpoznawania gestów, wykonywanych przez użytkownika w polu obrazowania sensora.
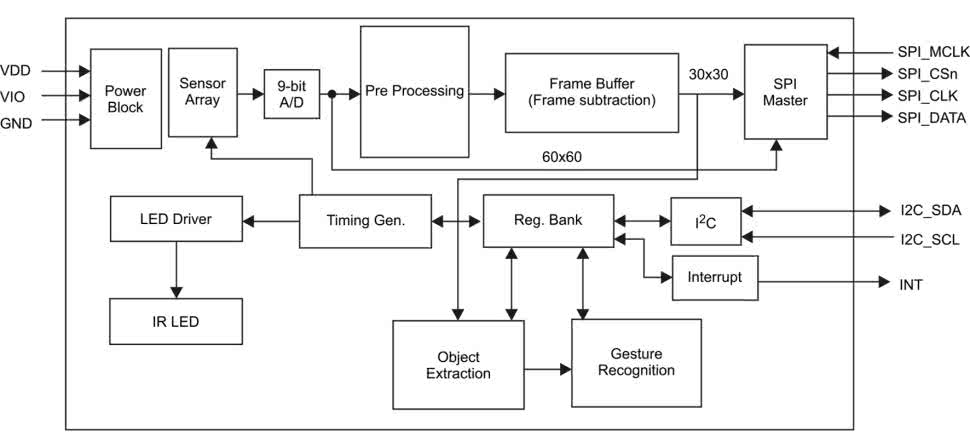
Natywna rozdzielczość macierzy fotoelementów (60×60 px) jest „przycinana” do 4-krotnie mniejszego rozmiaru (30×30 px) na jeden z trzech sposobów: poprzez decymację (rysunek 26), uśrednianie bloków 2×2 px (rysunek 27) lub selekcję tylko pikseli ze środkowego obszaru matrycy (rysunek 28), co zapewnia sporą elastyczność w obsłudze czujnika.
Potężny zestaw rejestrów umożliwia odczyt szeregu wysokopoziomowych parametrów, wśród których znalazły się:
- rodzaj wykrytego gestu 3D (przesuw góra/dół/prawo/lewo/przód/tył, obrót zgodnie lub przeciwnie do ruchu wskazówek zegara, a także machania ręką - wave),
- odległość (w jednostkach umownych, niezwiązanych bezpośrednio z systemem metrycznym czy calowym),
- jasność i rozmiar obiektu,
- współrzędne X,Y (tryb „kursora”).
Inżynierowie z firmy Avago zastosowali interesujące rozwiązanie w postaci podwójnego interfejsu komunikacyjnego czujnika - podczas gdy nastawy oraz odczyty rejestrów są dokonywane za pośrednictwem I²C, to dodatkowa szyna SPI umożliwia odczyt nieprzetworzonych danych z matrycy czujnika w trybie obrazowym (image mode). Jak można się domyślić, sensor pracuje w tym przypadku nie inaczej, jak tylko w roli prostej kamery monochromatycznej, a funkcjonalność ta pozwala nawet zrealizować prosty OCR z użyciem Arduino i odpowiedniego programu komputerowego.
Optyczne czujniki odległości
Jak już podkreśliliśmy we wcześniejszej części artykułu, nawet bardziej rozbudowane czujniki zbliżeniowe oraz sensory gestów bazują na bardzo prostej metodzie oceny odległości od obiektu poprzez pomiar ilości powracającego do fotoelementu(-ów) światła. Istnieje kilka metod „prawdziwego” pomiaru odległości za pomocą urządzeń optycznych, przy czym w skali makroskopowej najczęściej stosowane są:
- triangulacja,
- pomiar czasu przelotu wiązki (ToF - Time-of-Flight),
- stereowizja.
Ponieważ jednak trudno byłoby zrealizować trzecią z wymienionych technologii w postaci scalonej (co zresztą nie miałoby większego sensu praktycznego z uwagi na kluczowe znaczenie odległości pomiędzy kamerami), w artykule skupimy się na dwóch pierwszych metodach.
Dalmierze triangulacyjne
Triangulacyjna metoda pomiaru odległości wielu osobom kojarzy się (przynajmniej w pierwszej chwili) z kultowymi już czujnikami firmy Sharp. Choć faktycznie w swojej klasie sensory te nie mają zbyt dużej konkurencji, to rzecz jasna ta sama metoda jest stosowana także w znacznie bardziej rozbudowanych modułach przemysłowych (rysunek 29). Metoda triangulacji polega na oświetleniu obiektu (przeszkody) za pomocą dobrze skolimowanej wiązki światła, a następnie odebraniu odbitego światła za pomocą liniału fotoelementów bądź innego detektora, umożliwiającego określenie położenia plamki światła w jednym wymiarze (choć istnieją także realizacje 2-wymiarowe). Ważnym elementem urządzenia jest soczewka (obiektyw), zapewniająca właściwe rzutowanie wiązki na powierzchnię detektora.
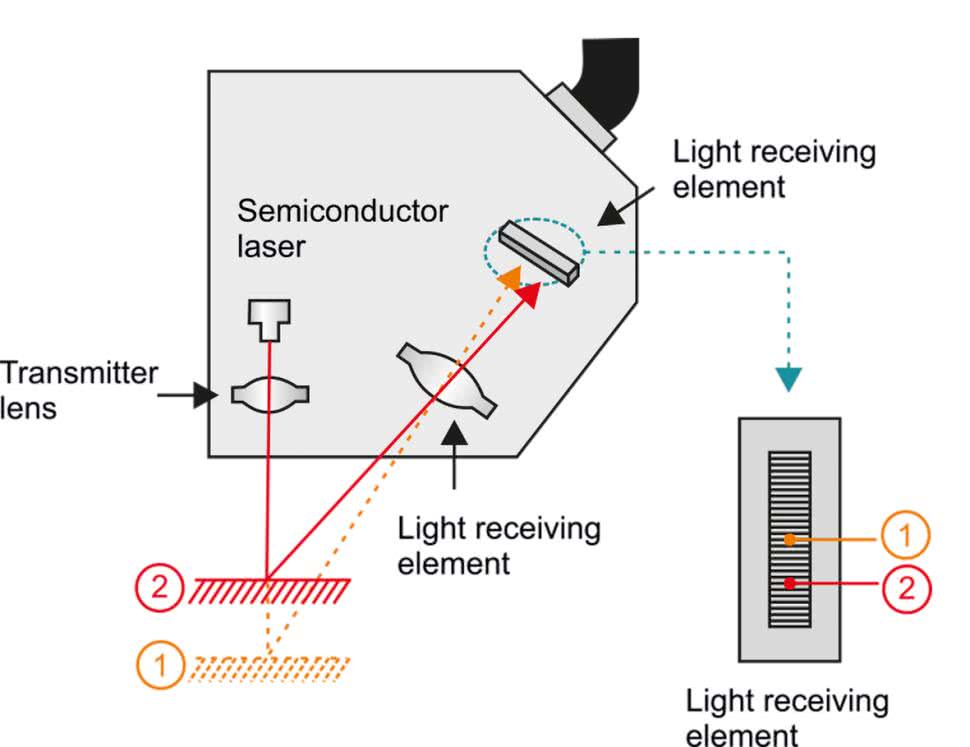
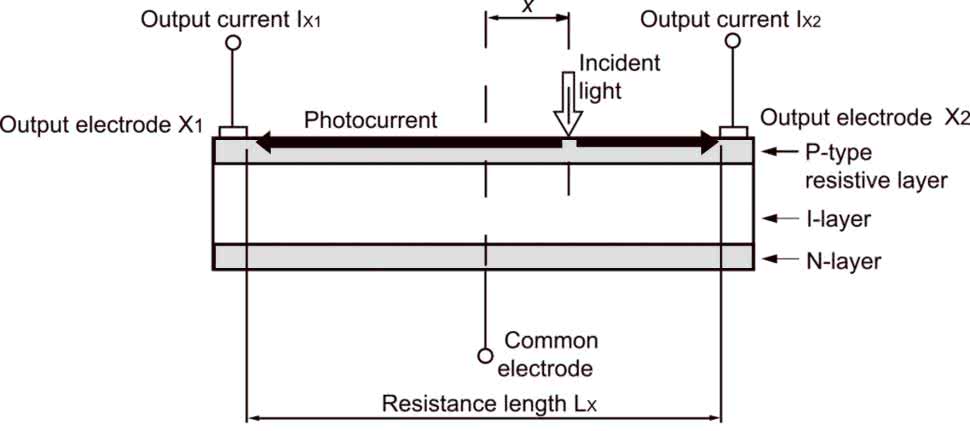
W przypadku niewielkich czujników Sharp - bardzo popularnych m.in. w aplikacjach „małej robotyki” - zasada działania jest zbliżona do tej, którą można znaleźć w rozbudowanych modułach przemysłowych. Sama konstrukcja czujnika jest przy tym znacznie uproszczona. Zamiast matrycy dyskretnych fotoelementów o odpowiednio wysokiej rozdzielczości, mamy bowiem do czynienia z dość prostym, analogowym detektorem typu PSD (Position-Sensitive Detector), czyli specjalną odmianą fotodiody, umożliwiającą określenie położenia plamki światła względem brzegów struktury światłoczułej (rysunek 30).
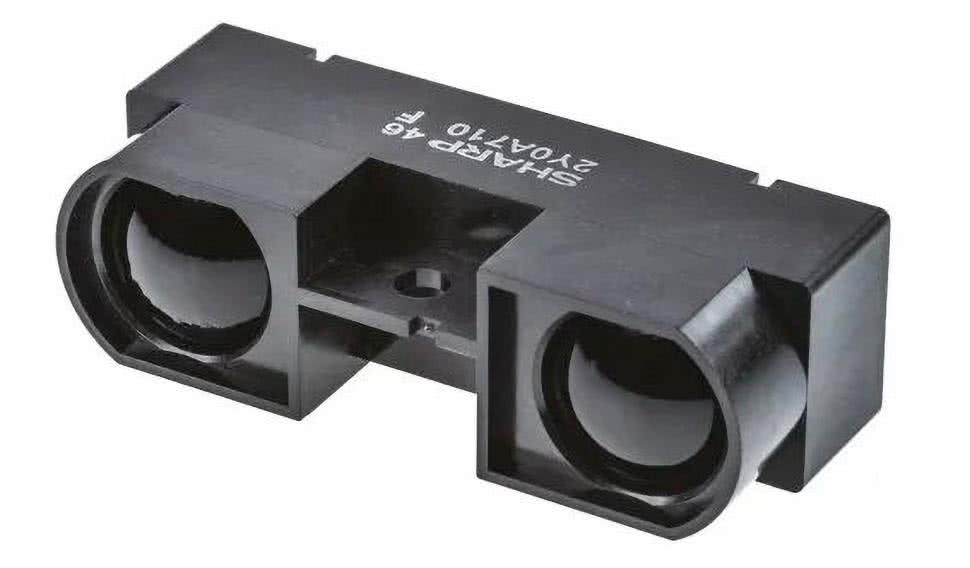
W przypadku dalmierzy Sharp do wyboru są zarówno popularne czujniki z wyjściem analogowym (np. GP2Y0A710K0F - fotografia 18), jak i układy z wyjściem cyfrowym, a ściślej rzecz ujmując - dwustanowym, bowiem (nieco wbrew nazwie) nie mamy tutaj do dyspozycji wyjścia z cyfrowym odczytem odległości - np. poprzez I²C, ale… prostym komparatorem, ustawionym fabrycznie na określoną odległość (np. 80 cm w przypadku modelu GP2Y0D02YK0F).
Omawiana seria produktów ma niestety kilka dość istotnych wad, które znacznie utrudniają zastosowanie czujników w bardziej wymagających aplikacjach. Po pierwsze, sensory z wyjściem analogowym charakteryzują się silną nieliniowością charakterystyki napięcia wyjściowego w funkcji odległości od przeszkody (rysunek 31), a co gorsza - charakterystyka ta nie jest monotoniczna w zakresie od zera do wartości granicznej (np. 80 cm) - stąd też, o ile nie istnieją mechaniczne przeszkody uniemożliwiające nadmierne zbliżenie obiektu do czujnika, rozróżnienie rzeczywistej odległości może być niemożliwe.
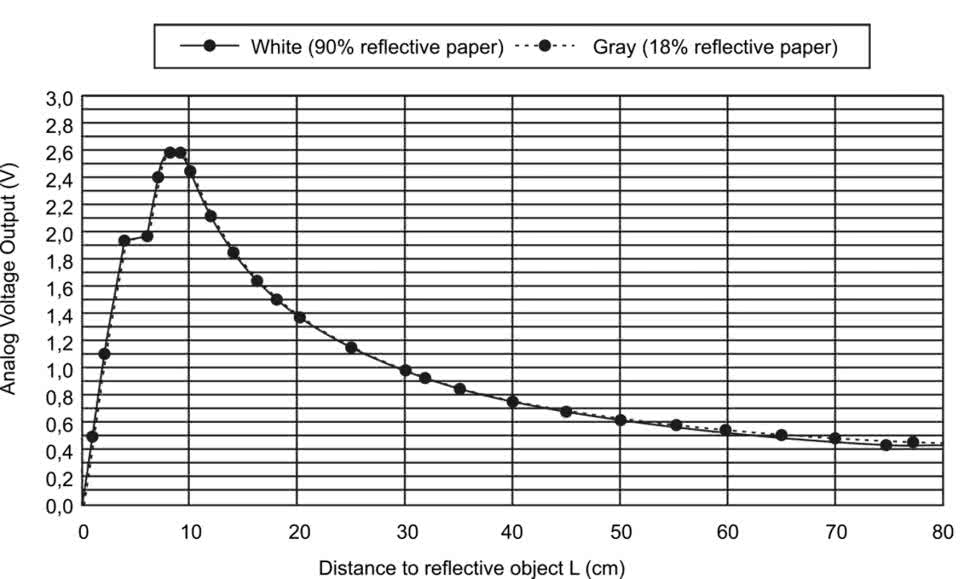
Przykładowo - czujniki z serii GP2Y0A odpowiadają w przybliżeniu taką samą wartością napięcia wyjściowego zarówno na odległość równą 25 cm, jak i ok. 2 cm, co np. w aplikacji robota mobilnego może mieć dość bolesne konsekwencje. Ratunkiem pozostaje programowa dyskryminacja niewłaściwych wartości pomiaru poprzez rozpatrywanie napięcia wyjściowego czujnika w kontekście „najświeższej” historii pomiarów.
Tak samo istotnym, a nawet jeszcze poważniejszym problemem może być natomiast podatność na błędy wynikające z kątowego ustawienia powierzchni o sporej reflektancji (np. szkła, lustra, tworzywa sztucznego, ale także dobrze wypolerowanego metalu) względem osi optycznej detektora.
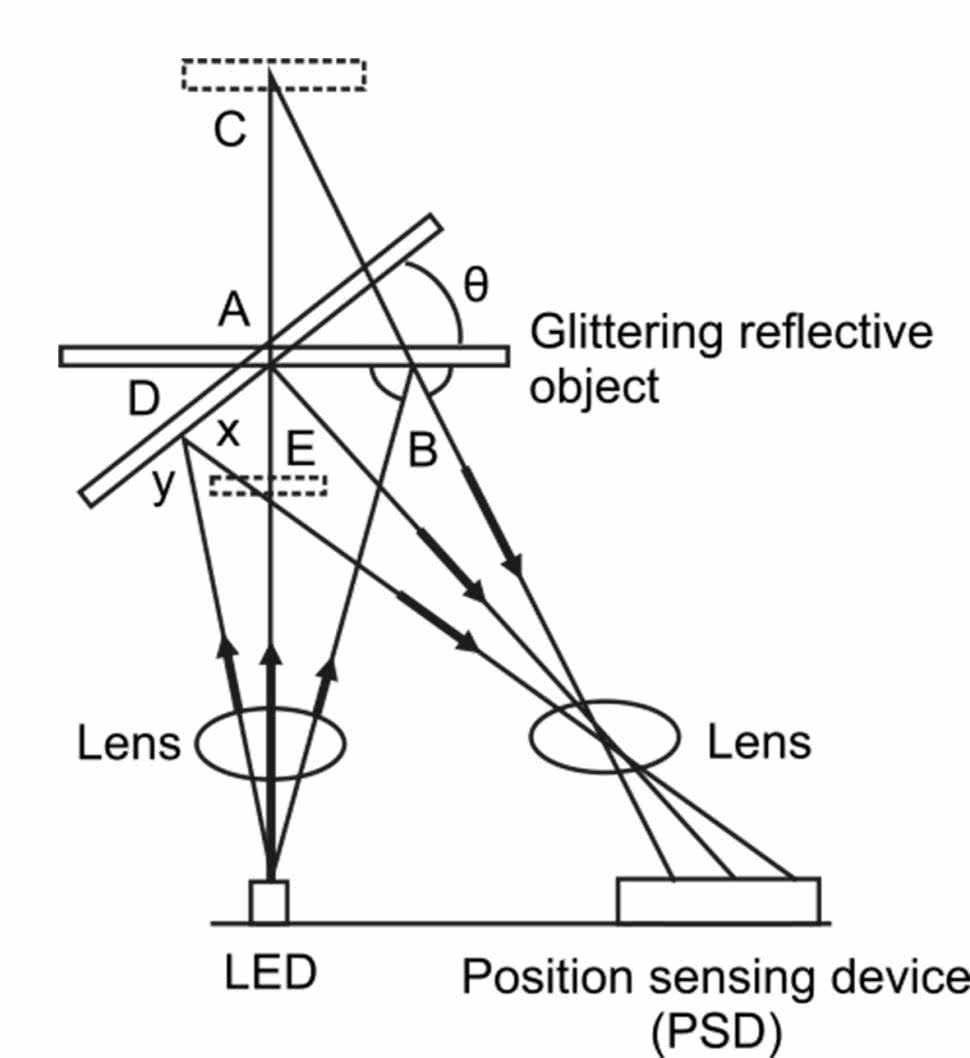
Na rysunku 32 pokazano schematycznie dwie sytuacje powodujące niejednoznaczność pomiaru odległości metodą triangulacyjną - przechylenie obiektu o kąt Θ powoduje, że wiązka odbita od punktu D „udaje” obiekt znacznie bliższy (położony w pozycji E). Co więcej, przekłamania mogą powstawać także w wyniku samej tylko rozbieżności wiązki oświetlającej obiekt - prawy promień biegnący od diody LED do przeszkody (umieszczonej w najlepszej możliwej pozycji, czyli prostopadle do osi optycznej czujnika) i tak może doprowadzić do fałszywego odczytu, „udając” promień odbity od znacznie dalszego obiektu (C).
Czujniki Time-of-Flight
Rozwój nowoczesnych laserów VCSEL, szybkich i bardzo czułych detektorów fotonowych typu SPAD oraz zaawansowanych front-endów scalonych doprowadził w ostatnich latach do wprowadzenia na rynek doskonałych czujników optycznych, umożliwiających pomiar czasu „przelotu” wiązki światła z sensora do przeszkody i z powrotem (ToF). Metoda ta bazuje zresztą na identycznej koncepcji, jaka jest stosowana w przypadku znacznie prostszych dalmierzy ultradźwiękowych, ale w tym przypadku poprzeczka technologiczna jest umieszczona nieporównanie wyżej - prędkość światła (w przybliżeniu 3∙108 m/s) wymaga zastosowania albo niezwykle szybkich układów pomiaru czasu (tzw. metoda bezpośrednia - direct ToF) albo fazy, przy użyciu sygnałów zmodulowanych (metoda pośrednia - indirect ToF). W ramach tego artykułu nie będziemy jednak zagłębiać się w techniczne szczegóły realizacji obu metod, skupimy się natomiast na kilku przykładach konkretnych produktów kilku czołowych producentów. Aby lepiej poczuć, z jak zaawansowaną technologią mamy do czynienia w scalonych sensorach ToF, warto jedynie uświadomić sobie, że czas, w jakim fotony pokonują dystans rzędu 1 centymetra, to zaledwie 67 pikosekund - a przecież nowoczesne czujniki są w stanie z całkiem przyzwoitą dokładnością wskazywać nawet zmiany rzędu submilimetrowego (!).
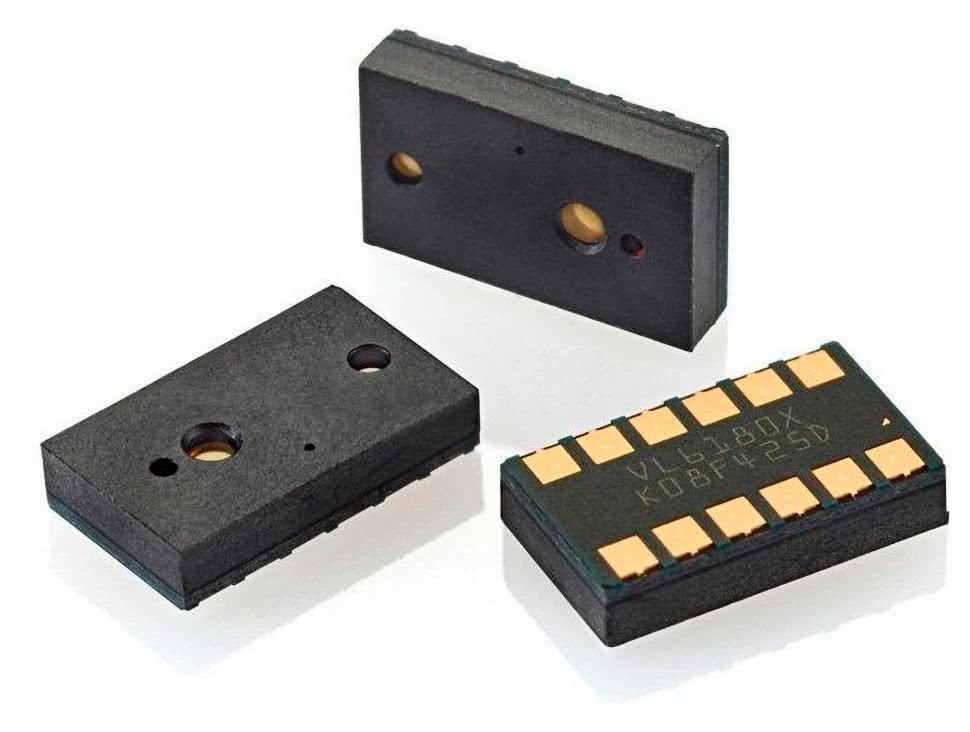
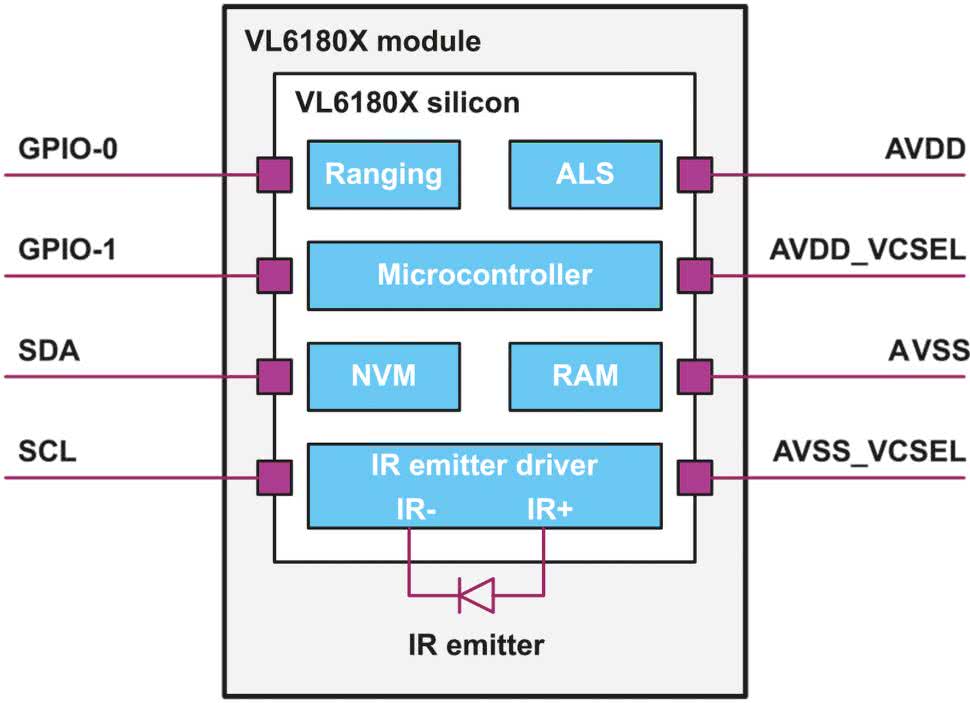
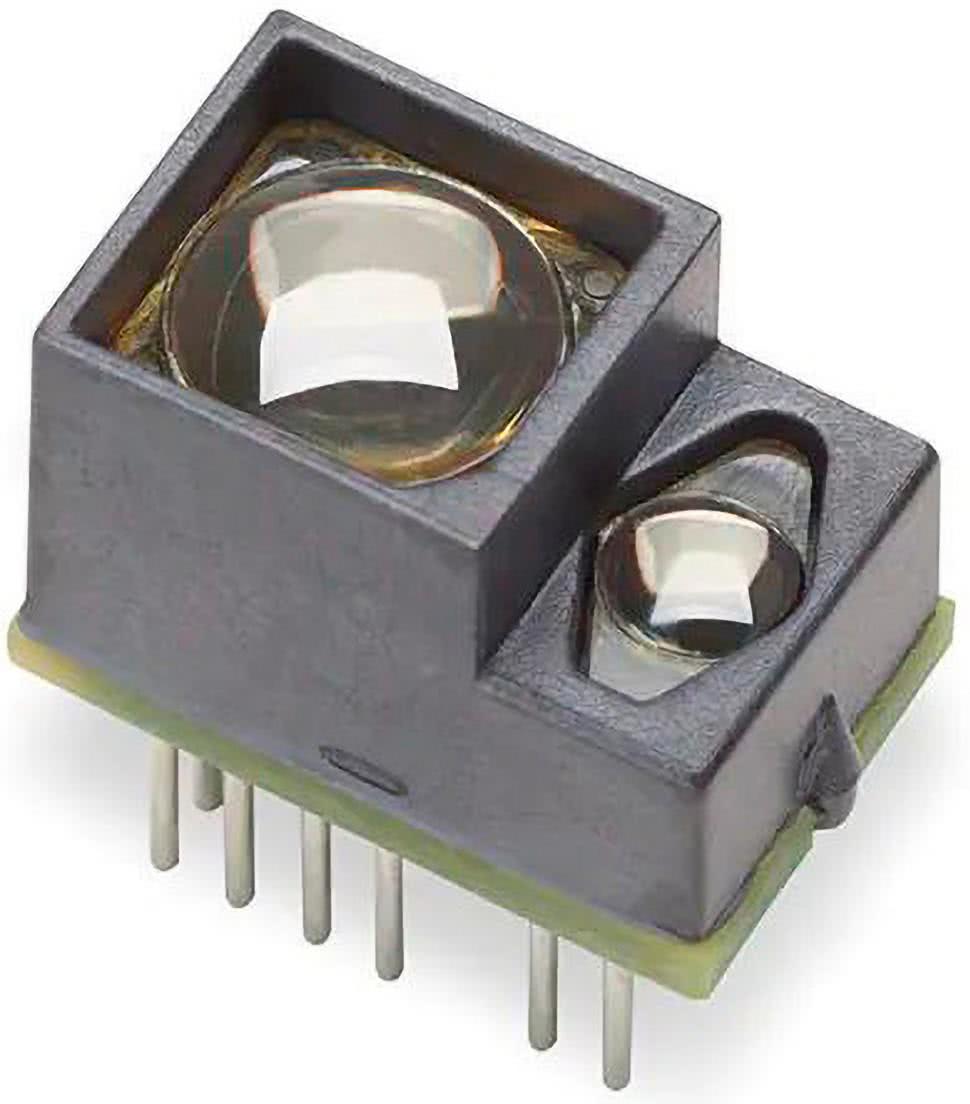
W grupie nowoczesnych i coraz popularniejszych czujników odległości typu ToF warto wskazać szerokie portfolio firmy STMicroelectronics. Układ VL6180X (fotografia 19) jest wyposażony w oświetlacz laserowy (VCSEL) o szczytowej długości fali 850 nm oraz superczuły fotodetektor, bazujący na technologii SPAD (więcej na ten temat można przeczytać w artykule pt. Fotoelementy - serce optoelektroniki), a całość jest wspierana przez wbudowany mikrokontroler oraz 16-bitowy czujnik światła zewnętrznego o zakresie pracy od 1 lx do 100 klx (rysunek 33).
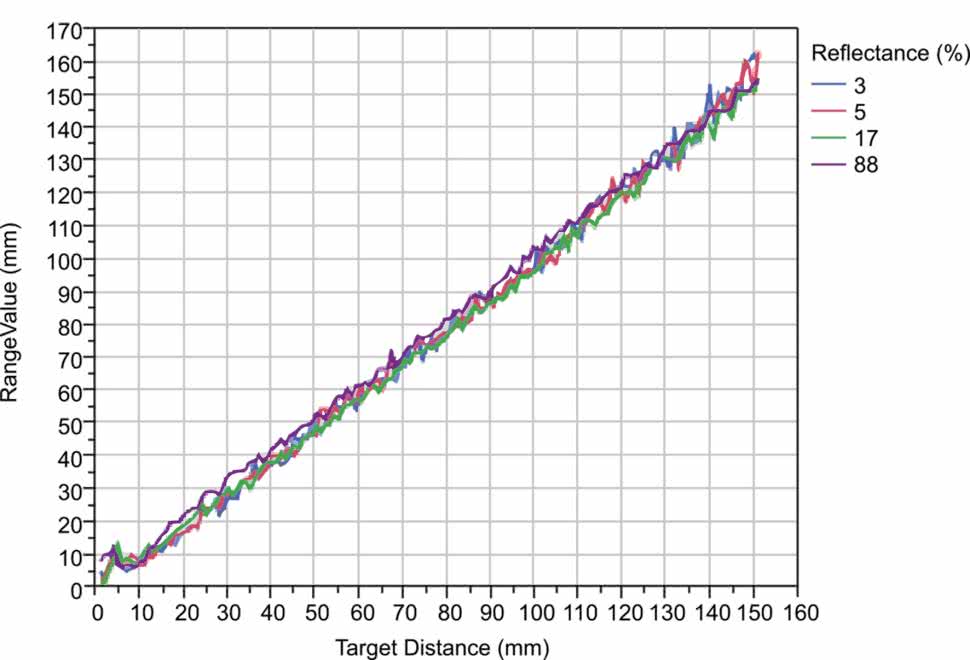
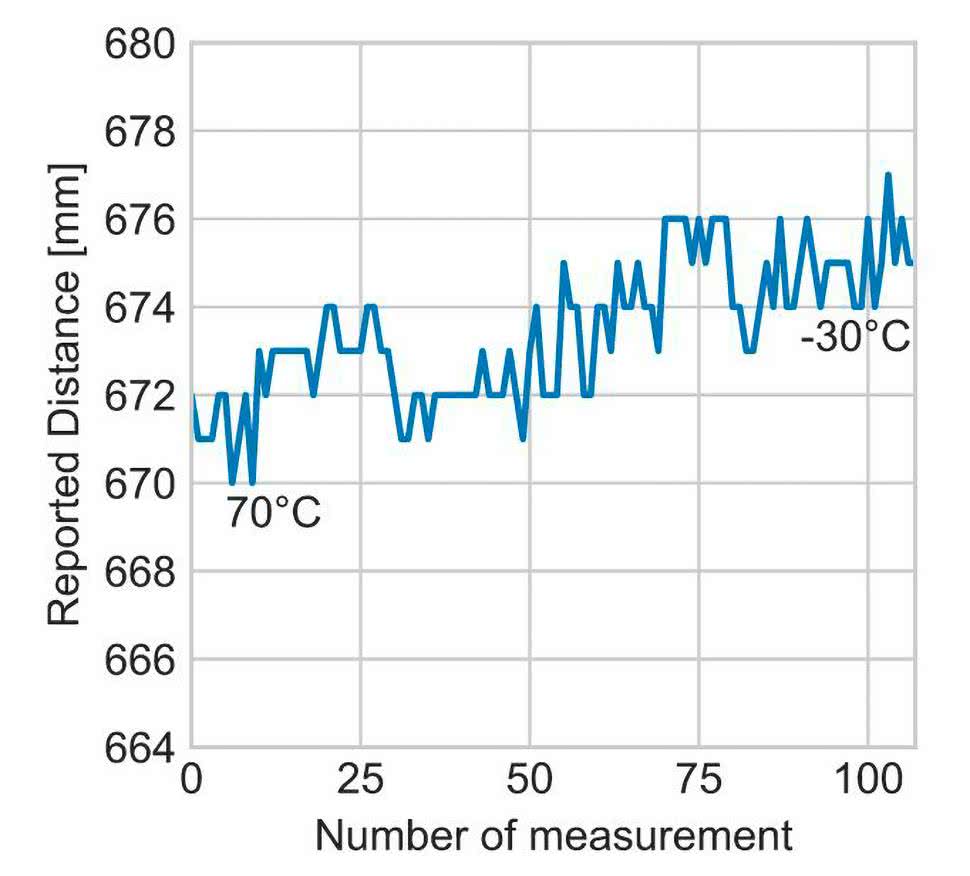
Czujnik - podobnie zresztą jak inne sensory tego typu - ma szereg niebywałych zalet: jest w dużej mierze niezależny od reflektancji (rysunek 34), geometrii i orientacji obiektu, oferuje doskonałą liniowość, dobrą dokładność pomiarową oraz relatywnie niski pobór mocy.
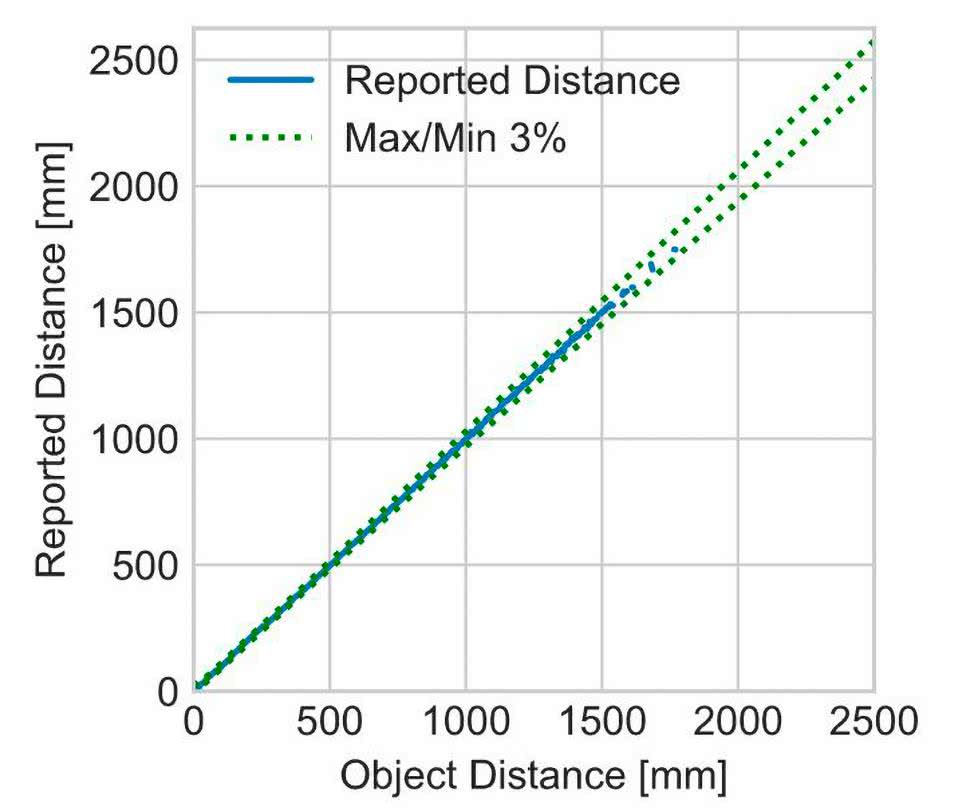
Jakość metrologiczna jest zresztą istotną kartą przetargową w tym segmencie rynku, a kolejni producenci prześcigają się w zwiększaniu dokładności i powtarzalności pomiarów - dość spojrzeć na przykładowe charakterystyki innego sensora ToF - TMF8820/21/28 marki ams OSRAM (rysunki 35 i 36).
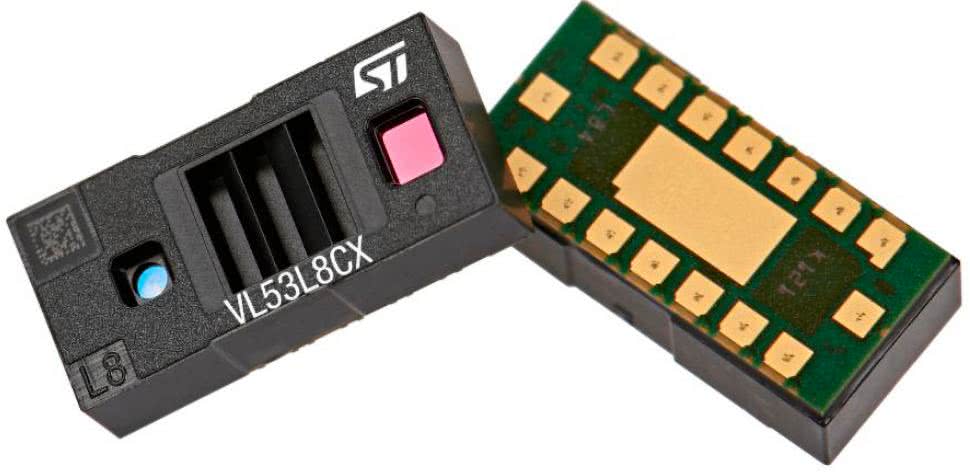
Bardziej rozbudowane czujniki umożliwiają wielostrefowy pomiar odległości na podstawie konfigurowalnej programowo macierzy fotoelementów SPAD - przykładowo jedna z najnowszych propozycji STMicroelectronics, czyli układ VL53L8CX (fotografia 20), pozwala na rejestrację odległości w 64 polach (macierz 8×8) i to w zakresie do 4 metrów.
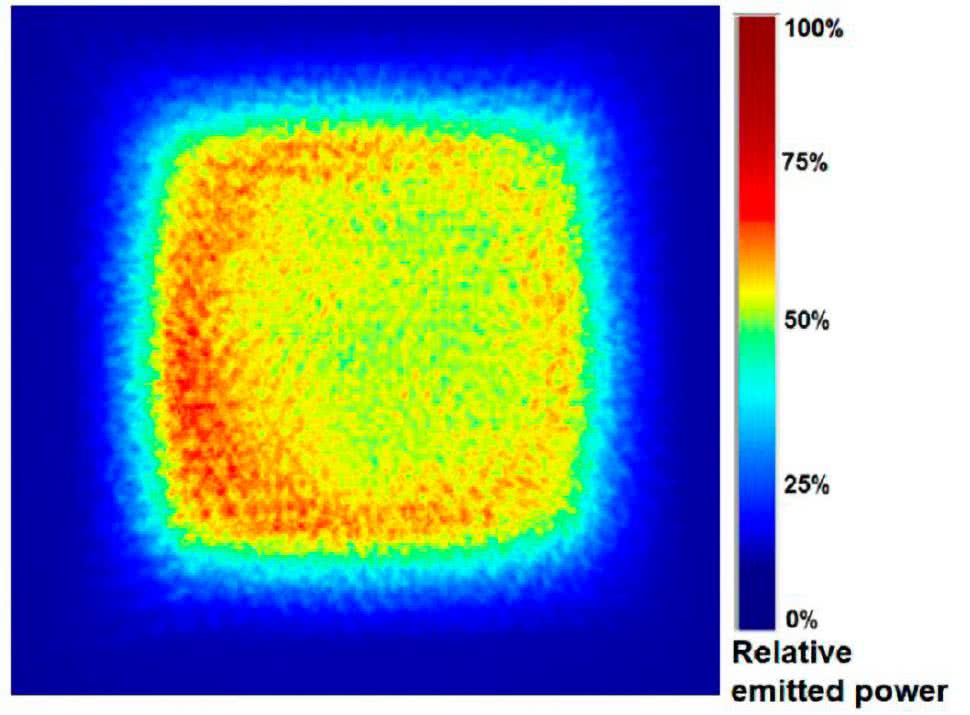
Za oświetlenie odpowiada odpowiednio ukształtowana wiązka laserowa o równomiernym pokryciu pola widzenia (rysunek 37), co zapewnia dogodne warunki do obrazowania głębokości sceny - warto bowiem zwrócić uwagę, że tak zaawansowane sensory coraz silniej zbliżają się (pod względem funkcjonalności) do… kamer ToF, będących jedną z najbardziej obiecujących technologii sensorycznych XXI wieku.
Oprócz czujników krótkiego zasięgu dostępne są także kompaktowe moduły o zaskakująco szerokim zakresie mierzonych odległości. Firma Broadcom opracowała serię dalmierzy optycznych AFBR-S50, oferującą zasięg rzędu 10 m, 50 m, 100 m, a nawet 200 metrów, a to wszystko przy wymiarach obudowy 12,4×7,6×7,9 mm (fotografia 21) i chwilowym poborze mocy nieprzekraczającym 80 mW. Tego typu sensory są szczególnie atrakcyjne dla konstruktorów robotów mobilnych oraz autonomicznych i semi-autonomicznych dronów, którym umożliwiają znaczne zwiększenie poziomu bezpieczeństwa podczas lotów w trudnym terenie oraz w czasie lądowania.
Podsumowanie
W pierwszej części naszego cyklu omówiliśmy wybrane czujniki oświetlenia, odległości oraz sensory zbliżeniowe z oferty największych światowych producentów. Wybór ten siłą rzeczy nie oddaje pełnego obrazu rynku, daje jednak podstawę do dalszych poszukiwań i precyzyjniejszej selekcji czujników do rozmaitych aplikacji. Różnorodność dostępnych obecnie rozwiązań sprawia, że konstrukcja tego typu modułów od podstaw traci sens w zdecydowanej większości zastosowań, z jakimi mamy do czynienia w codziennej praktyce inżynierskiej. Wybierając gotowe czujniki optyczne, można znacząco uprościć czas opracowywania nowego projektu - odpadają nam wówczas złożone zagadnienia związane z kolimacją optyki, wykonaniem precyzyjnej obudowy o dużej sztywności i stabilności termicznej czy też wreszcie projektowaniem miniaturowego front-endu o małych szumach, dużej czułości i szerokim zakresie dynamiki.
inż. Przemysław Musz, EP