Zaloguj
Zaloguj



Interfejs I2C
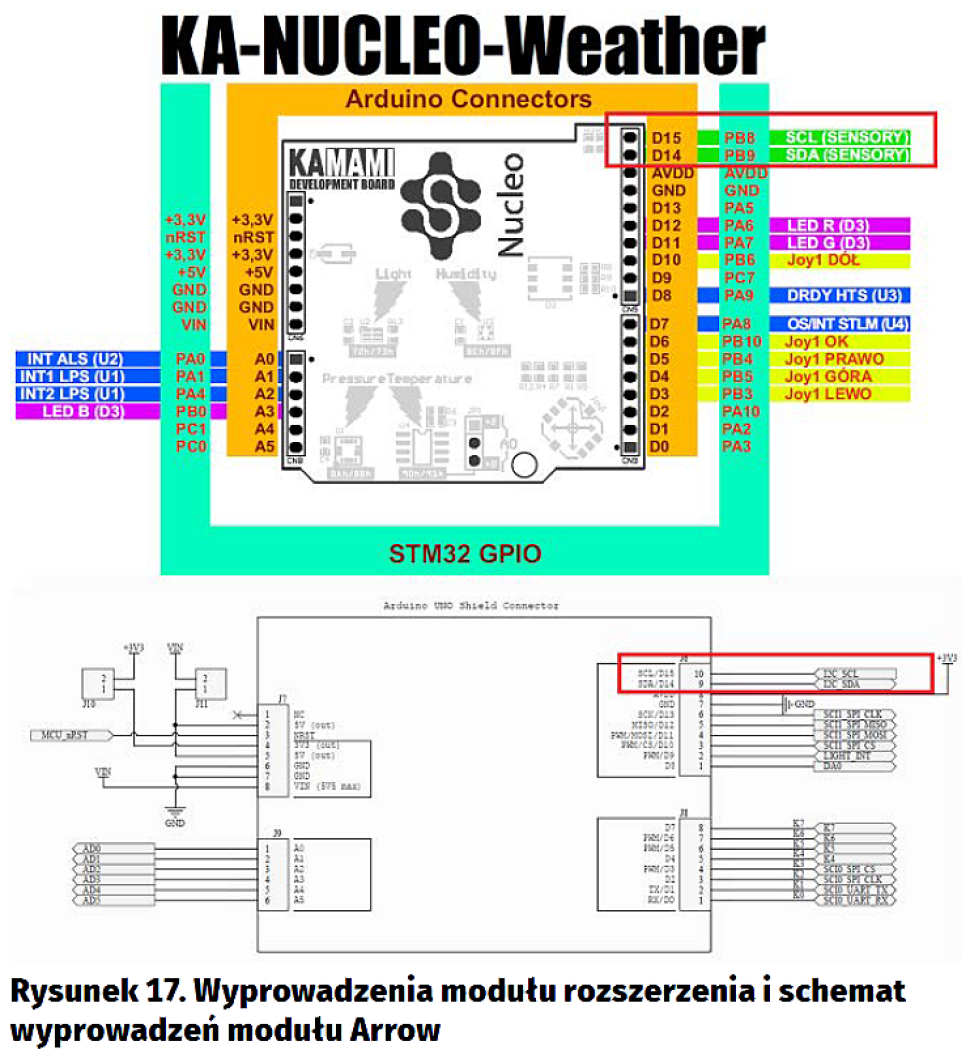
Jeżeli popatrzymy na schemat Arrow Aris EDGE, to widzimy, że wyprowadzenia linii SDA są dołączone do portu P206, a linii SCL do portu P205. W wypadku SPI mieliśmy swobodę wyboru interfejsu sterującego, bo połączenia były wykonywane za pomocą przewodów. Tu jest inaczej. Sztywne połączenie elektryczne determinuje wybór interfejsu i nie możemy wybrać SCI pracującego w trybie I2C. Linie P205 i P206 są przypisane do natywnego interfejsu IIC1 i musi on być użyty do obsługi modułu.
Schemat blokowy modułu IIC jest pokazany na rysunku 18. Jak widać, jest on dość skomplikowany. Generalnie, konfiguracja i obsługa interfejsu I2C jest jedną z trudniejszych, jeśli porównać ją do innych interfejsów szeregowych. Wynika to z dużych możliwości przy minimalnych wymaganiach sprzętowych. Moduły komunikacyjne I2C mogą pracować w trybie master lub slave. Możliwe jest dołączanie do jednej magistrali kilku układów master. Wymagane jest wtedy stosowanie mechanizmu arbitrażu kolizji na magistrali. W dokumentacji mikrokontrolera jest zawarty szeroki opis modułu z rejestrami konfiguracyjnymi, przebiegami czasowymi i algorytmami obsługi transmisji. Zapoznanie się z tymi wszystkimi informacjami i użycie ich do zaprogramowania transmisji jest zadaniem bardzo czasochłonnym. Poza tym wiem z doświadczenia, że nawet w obrębie tej samej rodziny mikrokontrolerów producent potrafi zmienić budowę i sposób programowania modułu komunikacyjnego. Trzeba wtedy posiadaną wiedzę na nowo weryfikować. Pokażę, jak tego uniknąć, stosując driver warstwy HAL biblioteki SSP oraz konfigurator środowiska e2studio. Zobaczymy, że konfiguracja interfejsu jest łatwa, a jego obsługa niezbyt skomplikowana.
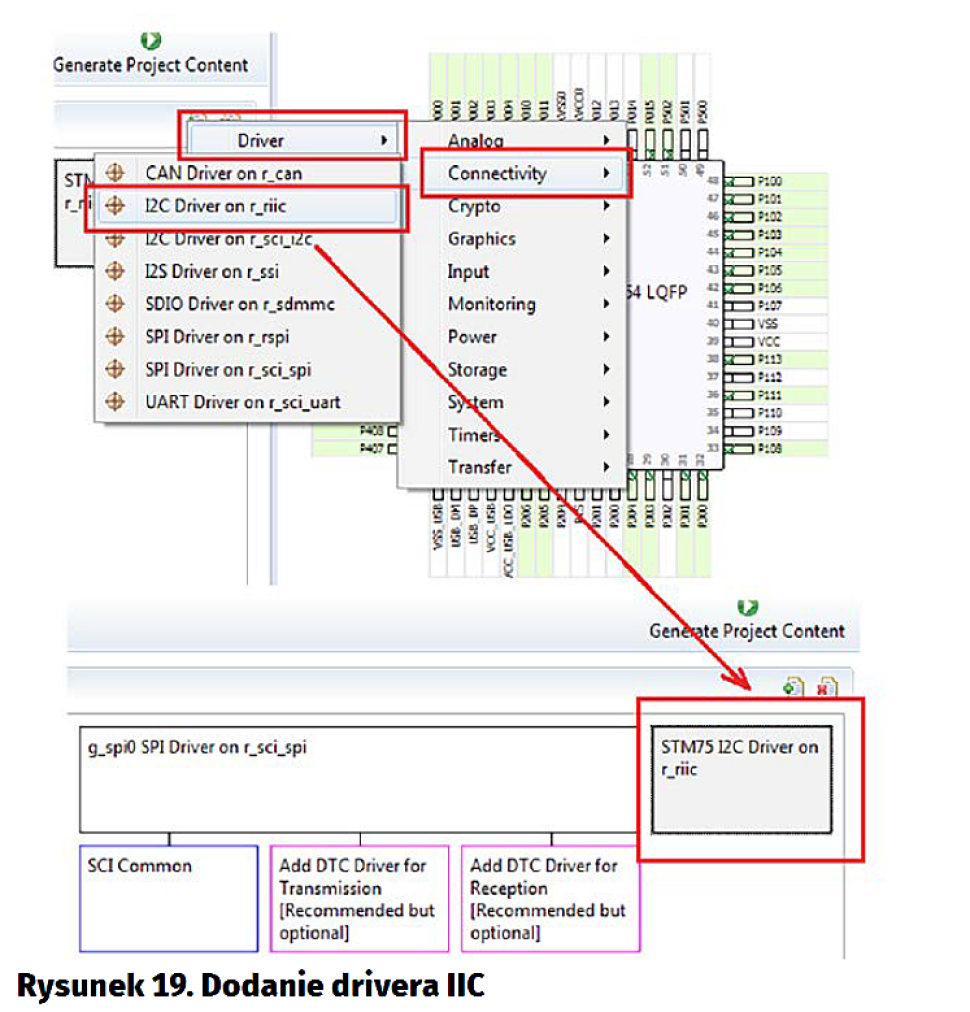
Podobnie jak w wypadku interfejsu SPI, trzeba w zakładce Threads HAL/Commons dodać driver I2C Driver on r_iic, jak to zostało pokazane na rysunku 19. Po dodaniu trzeba driver (interfejs IIC) skonfigurować poprzez:
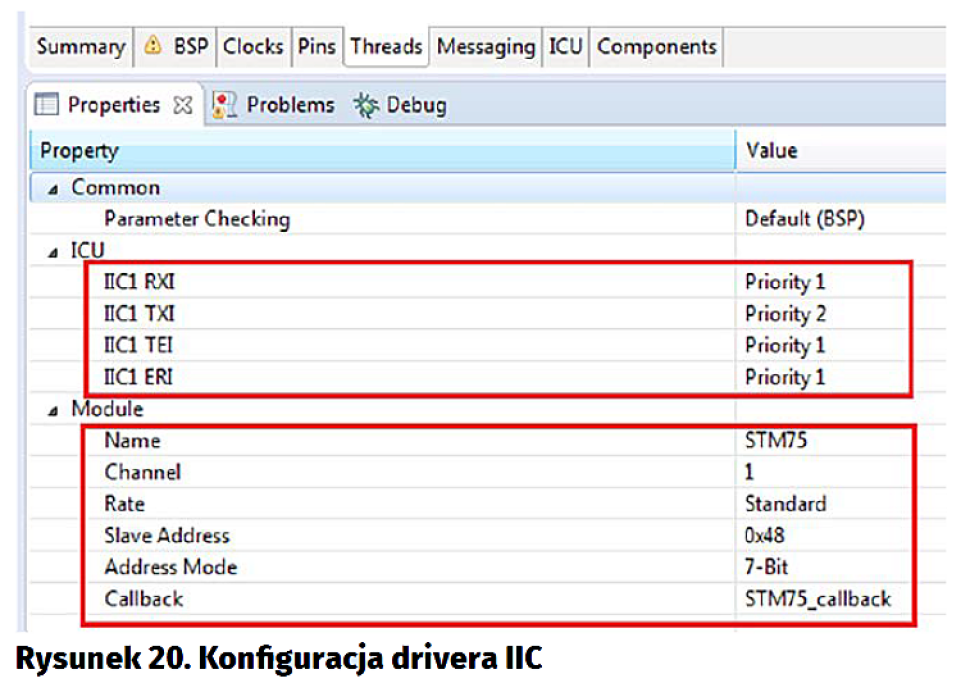
- Odblokowanie i nadanie priorytetów przerwań używanych przez driver.
- Nadanie modułowi nazwy wcielenia.
- Wybranie numeru kanału. Tu będzie to kanał 1 z powodów opisanych wcześniej.
- Ustawienie adresu urządzenia slave.
- Wybranie prędkości transmisji (100 kb/s, 400 kb/s lub 1 Mb/s).
- Wybranie trybu adresowania 7-bitowego lub 10-bitowego (w naszym wypadku będzie to adresowanie 7-bitowe).
- Włączenie powiadamiania callback poprzez nadanie mu nazwy. W odróżnieniu od interfejsu SPI, callback nie jest koniecznie wymagany. Kiedy nie zdefiniujemy nazwy funkcji callback, to funkcje drivera stają się funkcjami blokującymi i czekają na zakończenie transmisji. W testowych programach callback jest zdefiniowany i używany.
Jak widać, konfiguracja jest łatwa i zajmuje mało czasu. Po kliknięciu na Generate Project Content konfigurator wygeneruje pliki z konfiguracjami i funkcjami drivera IIC oraz umieści je w projekcie.
Przed użyciem funkcji generujących ruch na magistrali trzeba wywołać procedurę otwarcia interfejsu.
|
ssp_err_t |
R_RIIC_MasterOpen (i2c_ctrl_t *const p_ctrl, i2c_cfg_t const *const p_cfg) |
ssp_err_t err;
err=R_RIIC_MasterOpen(STM75.p_ctrl, STM75.p_cfg);
Wszystkie funkcje drivera zwracają informacje o statusie wykonania funkcji ssp_err_t. Status SSP_SUCCESS oznacza prawidłowe wykonanie funkcji, SSP_ERR_IN_USE próbę otwarcia drivera już otwartego i SSP_ERR_INVALID_RATE – nie można ustawić żądanej prędkości transmisji.
Do komunikowania się z układami peryferyjnymi w trybie Master potrzebne będą tylko 2 procedury: zapisu danych na magistralę i odczytu danych z magistrali. Zapis danych na magistralę realizuje procedura R_IIC_MasterWrite:
|
ssp_err_t |
R_RIIC_MasterWrite (i2c_ctrl_t *const p_ctrl, uint8_t *const p_src, uint32_t const bytes, bool const restart). |
- Wskaźnik na strukturę sterującą i2c_ctrl_c.
- Wskaźnik na bufor z danymi do wysłania.
- Liczba bitów do przesłania.
- Znacznik bitowy restart.
Jak się łatwo domyślić, wywołanie procedury musi zainicjować sekwencję START, a potem jest wysyłany adres slave ustawiony w konfiguracji z bitem R/W=0 i kolejne dane zapisane w buforze w liczbie określonej przez zmienną bytes. Funkcja zapisu na magistralę, podobnie jak opisywana funkcja odczytu z magistrali, nie ma jawnie ustawianego w argumencie adresu slave urządzenia peryferyjnego. Ten adres jest zapisany w strukturze konfiguracyjnej i ustawiany w oknie Properties w polu Slave Address (rysunek 20). Taki sposób adresowania slave powoduje, że dla każdego z urządzeń dołączonych do magistrali I2C trzeba zdefiniować osobny driver.
Każda sekwencja transferu na magistrali musi zakończyć się sekwencją STOP, jednak często zdarza się, że odczyt danych jest poprzedzony zapisem. Tak jest na przykład podczas odczytywania danych z pamięci EEPROM. Najpierw są wysyłane bajty adresu, a po nich sekwencja odczytania porcji danych. W takim wypadku po zapisaniu adresu nie wystawia się sekwencji STOP, tylko ponowny START. Żeby to było możliwe, wprowadzono argument restart. Kiedy ma on wartość false, to funkcja wysyła na magistralę sekwencję STOP, a kiedy ma wartość true, to sekwencja nie jest wysyłana. Jak to działa, zobaczymy za chwilę przy okazji obsługi termometru STLM75.
Do odczytywania danych na magistrali jest przeznaczona procedura R_IIC_MasterRead
|
ssp_err_t |
R_RIIC_MasterRead (i2c_ctrl_t *const p_ctrl, uint8_t *const p_dest, uint32_t const bytes, bool const restart) |
- Wskaźnik na strukturę sterującą i2c_ctrl_c.
- Wskaźnik na bufor z danymi odbieranymi.
- Liczba bitów do odebrania.
- Znacznik bitowy restart.
Procedura rozpoczyna działanie od wysłania sekwencji START (REPEAT START). Po niej jest wysyłany adres slave z bitem R/W=1. Aby odczytać dane z urządzenia slave, moduł wysyła kolejne cykle zegarowe. Odczytywanie kończy się lub nie sekwencją STOP zależnie od wartości zapisanej w argumencie restart, dokładnie tak samo, jak w wypadku funkcji zapisu danych na magistralę.
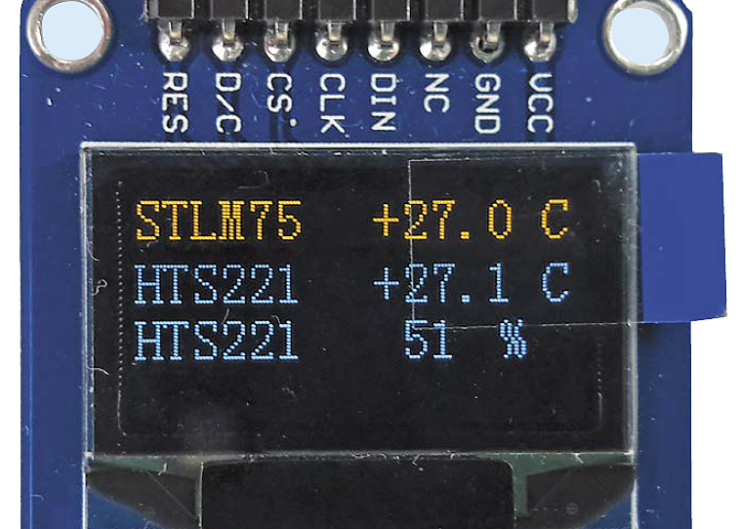
Praktyczne wykorzystanie drivera IIC rozpoczniemy od obsługi cyfrowego termometru STLM75 umieszczonego na płytce Nucleo. STLM75 mierzy temperaturę z rozdzielczością 0,5°C w zakresie –55…+125°C. To zakres pozwalający na pomiar w większości typowych zastosowań. Niepewność pomiaru dla całego zakresu pomiarowego wynosi ±3°C. Może to oznaczać, że pomimo wyniku pomiaru temperatury +13,5°C, w rzeczywistości w najgorszym wypadku może ona mieć wartość +10,5°C lub +16,5°C. W wypadku temperatury „pokojowej” taki pomiar praktycznie nie ma sensu. Jednak warto zauważyć, że jest to maksymalna odchyłka ±3°C w całym zakresie pomiarowym. Termometr jest tak skalibrowany, że typowa niepewność pomiaru dla temperatury otoczenia nie powinna być gorsza niż ±0,5°C.
|
ssp_err_t |
R_RIIC_MasterOpen (i2c_ctrl_t *const p_ctrl, i2c_cfg_t const *const p_cfg) |
|
ssp_err_t |
R_RIIC_MasterWrite (i2c_ctrl_t *const p_ctrl, uint8_t *const p_src, uint32_t const bytes, bool const restart). |
|
ssp_err_t |
R_RIIC_MasterRead (i2c_ctrl_t *const p_ctrl, uint8_t *const p_dest, uint32_t const bytes, bool const restart) |
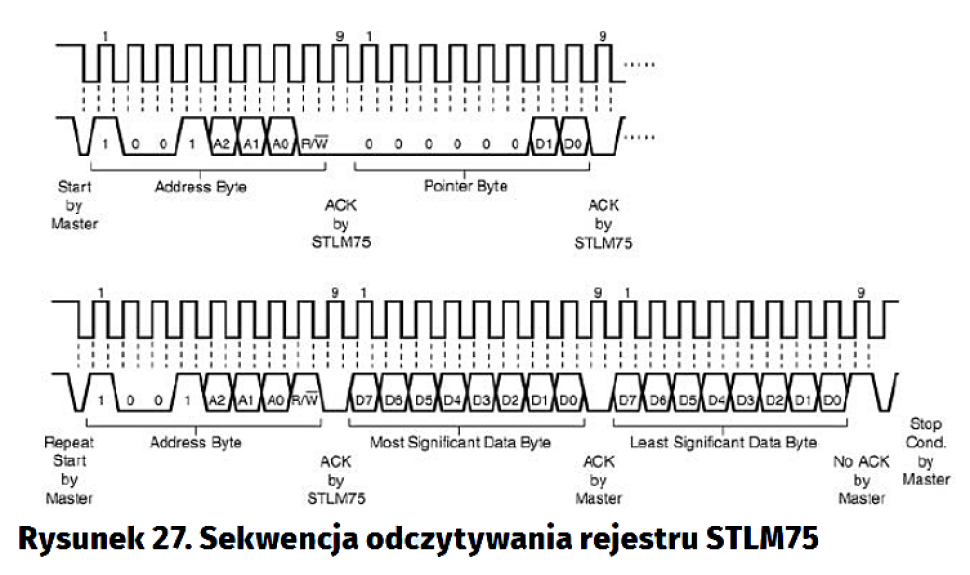
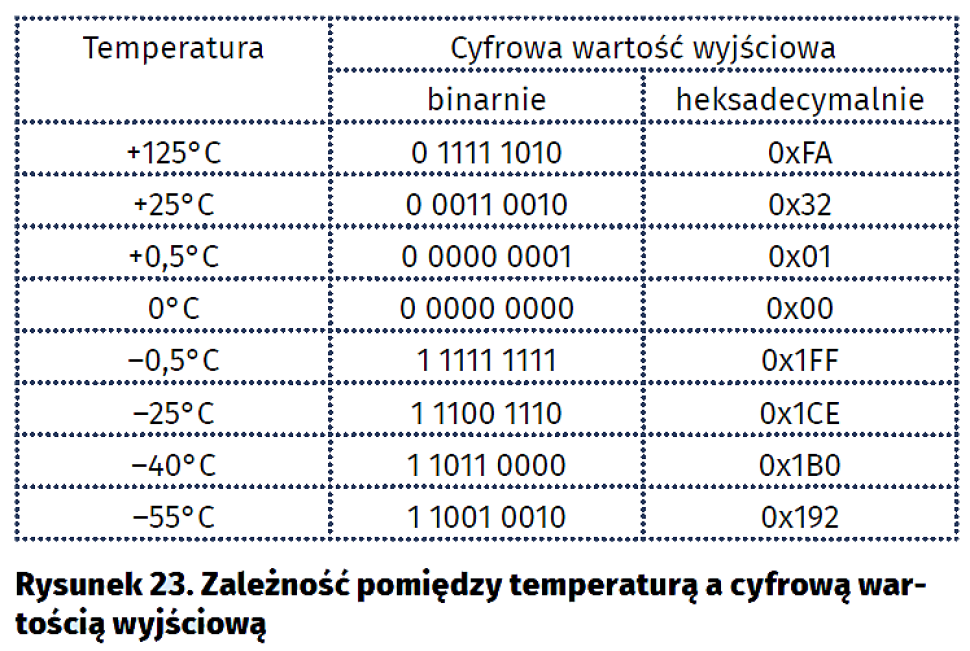
Jak wspomniałem, termometr mierzy temperaturę z rozdzielczością 0,5°C w zakresie –55…+125°C. Wynik konwersji jest zapisywany na 9 bitach w kodzie U2. Dla temperatury dodatniej (najstarszy bit wyniku konwersji równy 0) 8 najstarszych bitów zawiera wartość części całkowitej wartości temperatury, a najmłodszy bit określa rozdzielczość 0,5°C. Dla temperatury ujemnej (najstarszy bit wyniku konwersji równy 1) trzeba wykonać konwersję polegającą na zanegowaniu wszystkich bitów i dodaniu 1. Potem określenie temperatury przebiega tak samo, jak temperatury dodatniej. Na rysunku 23 pokazano zależność pomiędzy temperaturą i wartością odczytaną z rejestru termometru.
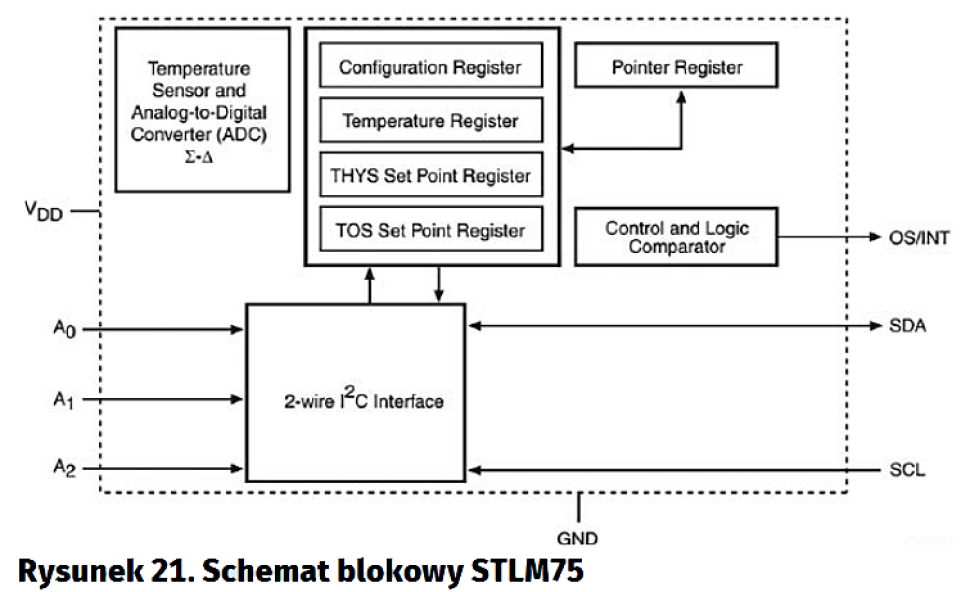
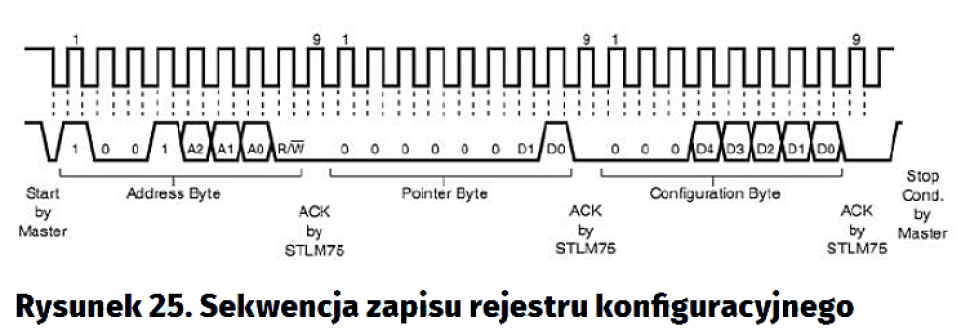
STLM75 ma 4 rejestry: 16-bitowy rejestr mierzonej temperatury TEMP, 8-bitowy konfiguracji CONF, 16-bitowy histerezy temperatury Thys i 16-bitowy progu temperatury Tos. Poza rejestrem odczytywanej temperatury TEMP, który można tylko odczytywać, pozostałe rejestry można zapisywać i odczytywać. Każdy rejestr przed dostępem (zapisem lub odczytem) musi być zaadresowany. Pierwszą ważną sekwencją protokołu komunikacji z STLM75 jest zapisywanie bajtu rejestru konfiguracyjnego. Polega ona na:
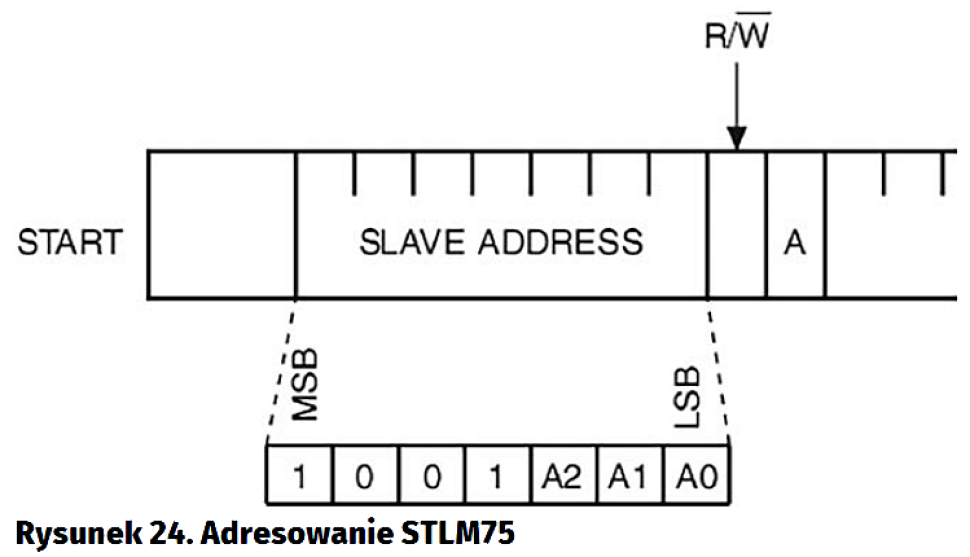
- Wysłaniu adresu slave z bitem R/W=0 (i odebraniu potwierdzenia ACK).
- Wysłaniu bajtu z adresem rejestru=1.
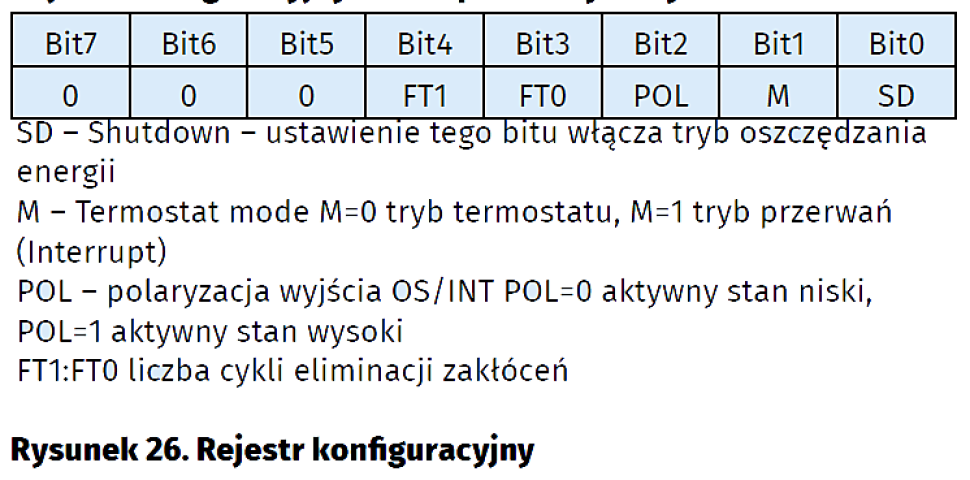
- Wysłaniu bajta rejestru konfiguracyjnego.
- Wysłaniu sekwencji STOP.
Pokazano to na rysunku 25.
Domyślnie po włączeniu zasilania wszystkie bity rejestru konfiguracyjnego są wyzerowane. Rejestry temperatury Thys i Tos są zapisywane podobnie jak rejestr konfiguracyjny, tylko po wysłaniu bajtu z adresem (równego 2 lub 3) wysyłane są dwa kolejne bajty rejestru 16-bitowego.
Kolejną ważną sekwencją jest odczytywanie dowolnego rejestru polegającego na:
- Wysłaniu adresu slave z bitem R/W=0 (i odebraniu potwierdzenia ACK).
- Wysłaniu bajtu z adresem rejestru (dla odczytania rejestru temperatury wyzerowany).
- Wysłaniu powtórnej sekwencji START.
- Wysłaniu adresu slave z bitem R/W=1 (i odebraniu potwierdzenia ACK).
- Odczytaniu dwu bajtów rejestru.
- Wysłaniu sekwencji STOP.
Tomasz Jabłoński, EP