Zaloguj
Zaloguj



Znajdujący się na płytce programator, to nic innego, jak kolejny układ z serii STM32, z wyprowadzonym złączem USB od strony użytkownika oraz interfejsami SWD i UART przyłączonymi do układu, który programujemy. Ma on wgrane oprogramowanie emulujący programator ST-LINK, a po przyłączeniu do komputera, przedstawia się jako trzy niezależne urządzenia USB - pamięć masowa, właściwy programator oraz port szeregowy (COM).
Na używanej przeze mnie płytce KA-NUCLEO-F411CE również i z głównego układu wyprowadzono USB dostępne dla użytkownika, więc moglibyśmy je użyć w roli interfejsu komunikacyjnego i nie korzystać z adaptera lub programatora. Znajomość konfiguracji interfejsu UART będzie nam jednak potrzebna w kolejnych częściach kursu, do komunikacji z innymi układami.
Wykrywanie przez system portu COM to nie przypadek. Interfejs USART jest częściowo kompatybilny z dawnym standardem RS232. Różnica polega na wykorzystywaniu innych poziomów napięć – standardowej logiki układu (u nas CMOS – 0 i 3,3 V) oraz kilku dodatkowych wyprowadzeniach w dawnym standardzie. Format przesyłanej ramki jest ten sam i za pomocą popularnego układu MAX232 możemy dołączyć nasz układ do portu COM komputera.
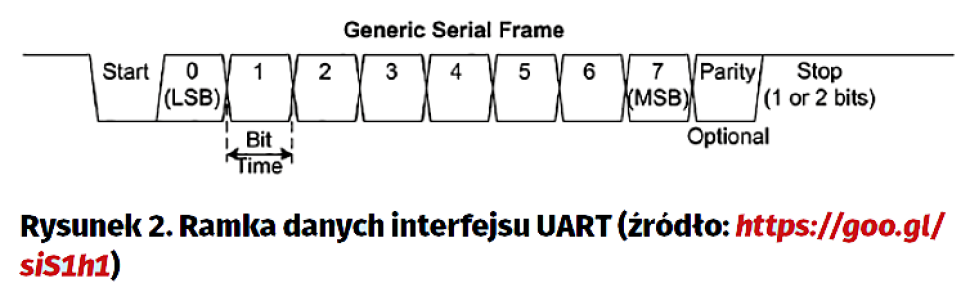
Wspomniałem już o interfejsach UART i USART. Czym jednak się one różnią? Interfejs UART jest interfejsem asynchronicznym, co oznacza, że urządzenia po obu stronach mogą zacząć nadawać w dowolnej chwili i nie wymieniają się sygnałem zegara. UART wykorzystuje jedynie dwa wyprowadzenia – jedno nadawcze, a drugie odbiorcze (łącząc układy należy jeszcze pamiętać o połączeniu ich mas). Interfejs USRT – oprócz sygnałów nadawczego i odbiorczego – wysyła również przebieg zegarowy określający jasno, w których momentach transmitowane są poszczególne bity. Jest on łatwiejszy w implementacji sprzętowej i zabezpiecza nas przed rozsynchronizowaniem się transmisji przy jej większych prędkościach, jednak używa dodatkowego wyprowadzenia.
Akronim USART to zbiorcza nazwa określająca oba standardy oraz interfejs mikrokontrolera, który może pracować w obu wymienionych trybach.
Niegdyś bardzo popularny interfejs RS232 miał więcej wyprowadzeń – min. sygnały Ready to Send oraz Clear to Send, sygnalizujące kolejno, że dane urządzenia ma w swoim buforze dane gotowe do wysłania oraz że przeciwne może je w tej chwili odebrać (w buforze jest na to miejsce). Standard RS232 pierwotnie był używany do łączenia komputerów z modemami, a dalej poprzez linie telefoniczne z innymi komputerami.
Pierwszy projekt
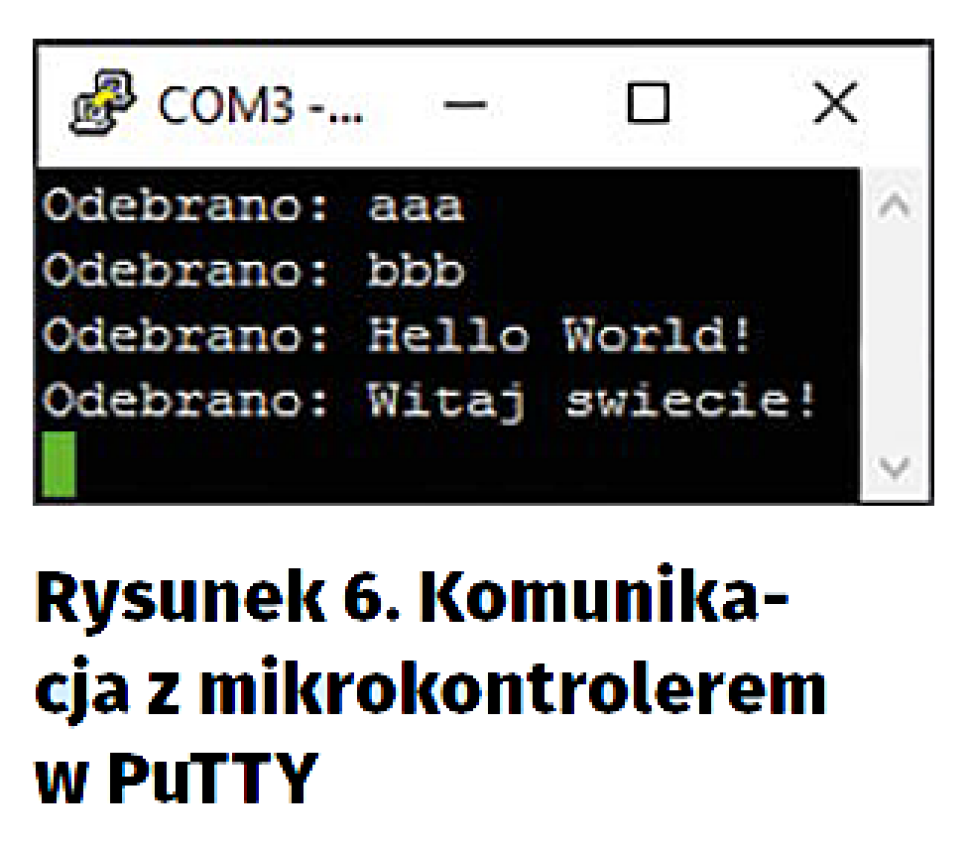
W dalszej części tego artykułu, omówimy działanie przerwań oraz wykorzystamy je, aby nie blokować pracy procesora, w trakcie oczekiwania na polecenia wysyłane z komputera. Nasz pierwszy projekt będzie jednak bardzo prymitywny – będzie on odbierał z komputera tekst wprowadzony przez użytkownika i odsyłał go, poprzedzając słowem „Odebrano: [...]”, aktywnie czekając na odbiór danych. Będzie to również bardzo dobry przykład tego, jak nie należy używać interfejsu UART…
Uruchamiamy oprogramowanie STM32CubeMX, tworzymy nowy projekt oraz wybieramy układ. Dla przypomnienia, przykłady z niniejszego cyklu wykonywane są na płytce rozwojowej KA-NUCLEO-F411CE, z układem STM32F411CEU6.
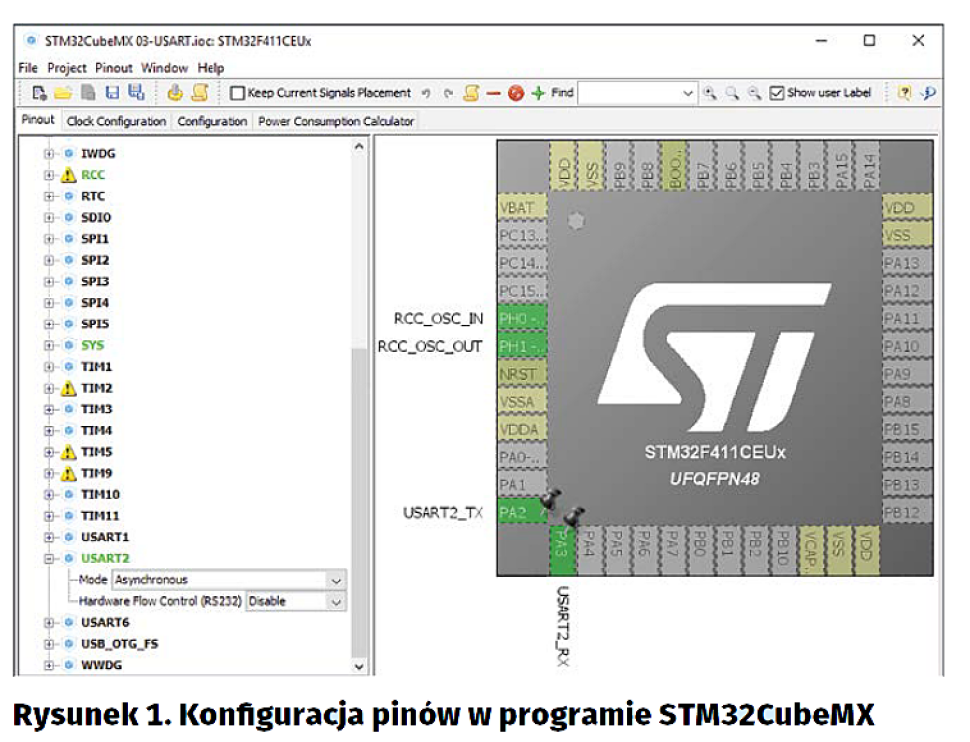
<–>USB wbudowany programator, używane przez nas wyprowadzenia to: PA2 w roli pinu nadawczego i PA3 w roli pinu odbiorczego. Jeśli korzystamy z innej płytki lub chcemy przyłączyć adapter USB albo układ MAX232 do wyprowadzeń płytki, musimy wyszukać wyprowadzeń w jej datasheecie. Z poziomu STM32CubeMX możemy natomiast sprawdzić, na których pinach układu można uruchomić interfejs – klikamy w tym celu lewym przyciskiem myszy na piny i szukamy funkcji alternatywnej o nazwie „USARTx_TX” lub „USARTx_RX”. Gdy chcemy ustawić wybrane piny, wybieramy z menu te funkcje. Do działania interfejsu UART potrzebujemy pinu TX oraz RX. Dla interfejsu USRT, dodatkowo pinu CK – zegara.
Po wybraniu odpowiednich pinów, z listy po lewej stronie wyszukujemy wybranego interfejsu USARTx, gdzie x to jego numer i wybieramy tryb pracy – w polu Mode ustawiamy opcję Asynchronous lub Synchronous. Możemy także dodać omawiane wcześniej piny RTS i CTS – odpowiada za to pole Hardware Flow Control (RS232). Na razie jednak ustawmy tryb pracy na Asynchronous i nie włączajmy pinów RTS/CTS.
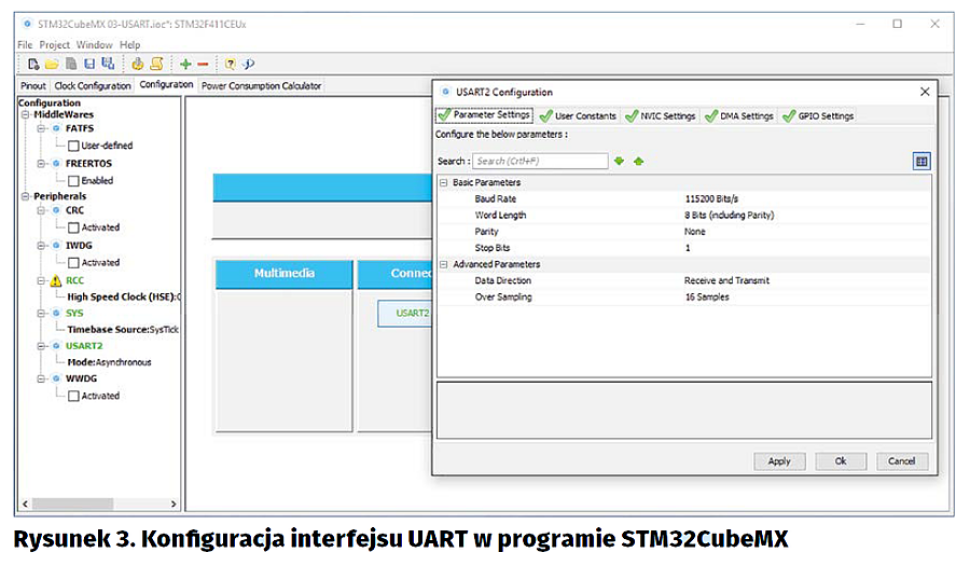
Dalej, przechodzimy do zakładki Configuration. W polu Connectivity pojawił się nowy interfejs USART. U mnie – USART2. Aby go skonfigurować, klikamy przycisk USARTx. Możemy teraz ustawić szybkość nadawania i odbioru, a także inne parametry przesyłanych ramek danych. Popularnymi szybkościami pracy są 115200 bps oraz 9600 bps. Jeśli chcemy sterować układem, który ma interfejs USART, powinniśmy sprawdzić, jaką szybkość ustawić w datasheecie tego układu. Podobnie ma się sprawa z liczbą bitów stopu i także bitem parzystości.
Na potrzeby komunikacji z komputerem, pozostawiamy domyślne ustawienia. Możemy już wygenerować projekt dla środowiska System Workbench for STM32 – klikamy w ikonę zębatki na pasku narzędziowym, zmieniamy wartość pola Toolchain/IDE na SW4STM32 i klikamy przycisk OK, następnie importujemy projekt w tymże środowisku – zamykamy planszę powitalną, klikamy PPM w puste pole w ramce Project Explorer i wybieramy kolejno: Import... " General " Existing Project into Workspace. Odszukujemy nasz projekt na dysku i klikamy OK.
Następnie otwieramy plik Src/main.c i w sekcji USER CODE 0 dopisujemy funkcje z listingu 1. Początkowo, ułatwią nam one komunikacje z komputerem. W dalszej części artykułu omówione zostaną także bezpośrednie wywołania HAL-a. Do sekcji USER CODE 3 wpisujemy poniższy kod – wywołanie zadeklarowanych wcześniej funkcji:
char buffer[1024];
uart_read_line(&huart2, buffer, 1024);
uart_write(&huart2, „Odebrano: „);
uart_write_line(&huart2, buffer);
W pierwszej linii powyższego kodu, tworzymy tablicę 1024 komórek typu char (przechowujących kolejne znaki ASCII wprowadzonego tekstu – litery, cyfry oraz symbole). Następnie wywołujemy funkcję uart_read_line(). Funkcja ta przyjmuje na wejściu wskaźnik na bufor i w trakcie swojego działania zapisuje do niego kolejne odebrane znaki, aż do odebrania znaku nowej linii lub przekroczenia długości bufora – wtedy w miejscu, w którym kończy się nasz ciąg znaków, w kolejnej komórce bufora, jest zapisywany znak null-terminator, oznaczający koniec ciągu. Funkcja uart_read_line(), poza wskaźnikiem na bufor, przyjmuje na wejściu również wskaźnik na strukturę konfiguracyjną interfejsu UART (%huartX, gdzie X to nr interfejsu, struktura ta jest generowana automatycznie przez CubeMX). Następnie, w niemal identyczny sposób, korzystając z funkcji uart_write() oraz uart_write_line() wyświetlamy napis „Odebrano: [...]” oraz odebrany ciąg zwieńczony znakami końca linii („rn” – kody ASCII powodujące powrót kursora na początek linii oraz przejścia do nowej).
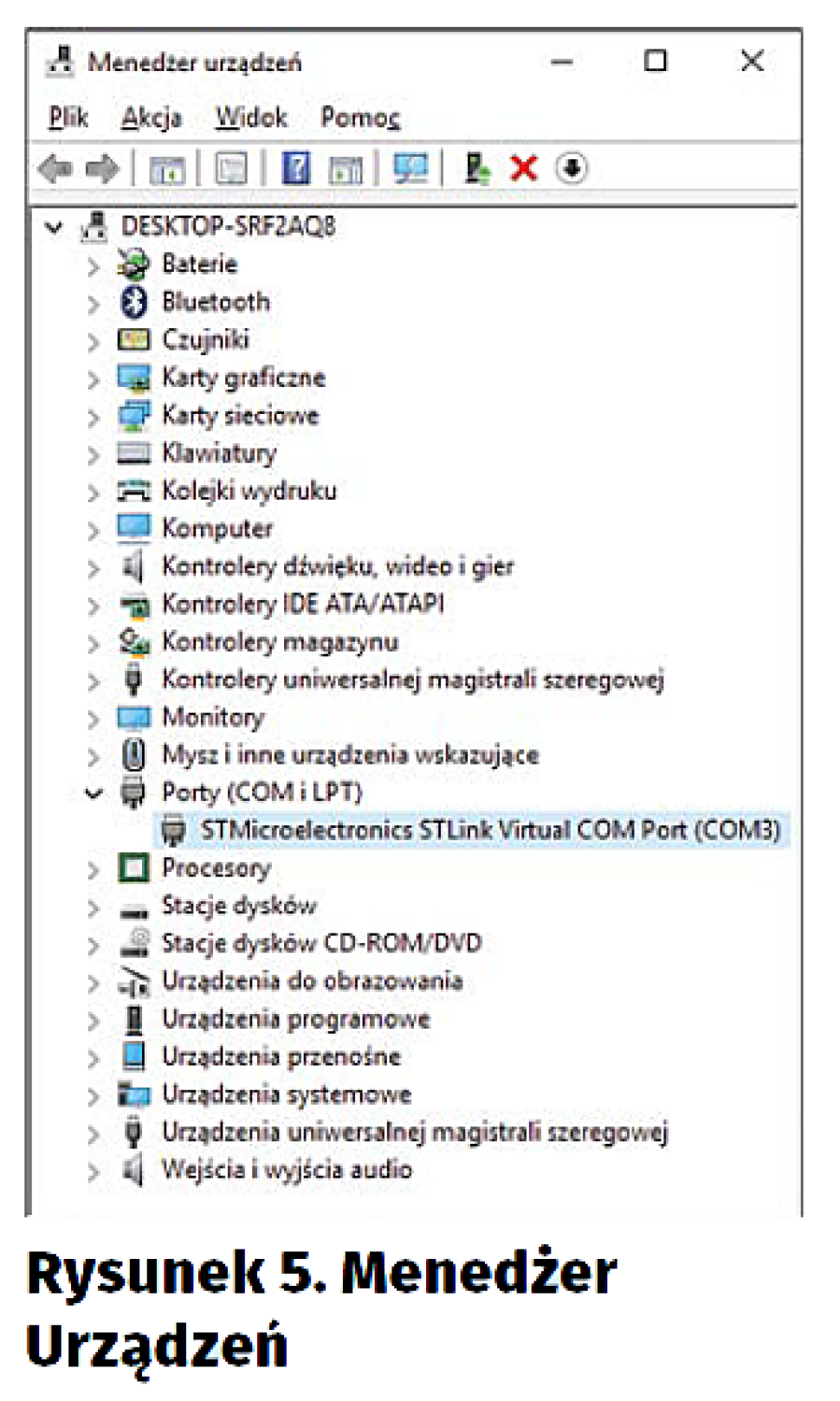
Teraz możemy skompilować kod i wgrać go na układ (ikony młotka i robaka na pasku menu) oraz uruchomić program PuTTY i „porozmawiać” z mikrokontrolerem. W oknie programu PuTTY, w polu Connection Type wybieramy opcję Serial, w polu Speed wpisujemy wybraną szybkość połączenia (domyślnie 115200 bps). W polu Serial line podajemy nazwę portu szeregowego – rysunek 4. Tą ostatnią poznamy w systemowym Menadżerze Urządzeń (rysunek 5), w sekcji Porty (COM i LPT), pod Windowsem oraz w logu kernela, w systemach Unixowych (Linuksowe polecenie dmesg).
Sterowanie kolorem świecenia diody RGB z komputera
Uruchamiamy CubeMX i otwieramy w nim nasz projekt. Zgodnie z instrukcją z poprzedniej części, ustawiamy piny diody RGB jako wyjściowe piny generatora PWM, konfigurujemy licznik oraz generujemy projekt z wprowadzonymi zmianami. Jeśli stosowaliśmy się do sekcji USER CODE, nie powinniśmy teraz utracić naszego kodu. Ponownie uruchamiamy System Workbench lub odświeżamy listę plików (polecenie Refresh w Project Explorer). W sekcji USER CODE 0 wpisujemy fragment kodu z listingu 2, obsługujący korekcję gamma. Funkcji z poprzedniego etapu możemy się już pozbyć (wrócimy do nich w kolejnej części cyklu). Do sekcji USER CODE 2 wpisujemy poniższy kod z listingu 3, powodujący uruchomienie generatora PWM na pinach. W sekcji USER CODE 3 wpisujemy kod z listingu 4 służący do odbierania danych i zmiany koloru świecenia LED.
W pierwszej linii kodu z list. 4, w sekcji USER CODE 3, tworzymy bufor o rozmiarze jednego znaku. Następnie odbieramy ten znak od użytkownika do buforu, korzystając z funkcji HAL_UART_Receive() – jej kolejnymi parametrami są: wskaźnik na strukturę konfiguracyjną interfejsu, wskaźnik na bufor, długość bufora oraz timeout – czas, po jakim funkcja ma się poddać i zwrócić informację o niepowodzeniu, jeśli nie otrzyma żadnych danych. Dalej sprawdzamy, czy funkcja zwróciła informację o odebraniu danych i na podstawie odebranego znaku decydujemy, jasność, jakiej barwy zwiększamy lub zmniejszamy. Jeśli wychodzimy przy tym poza skalę – od 0 do 1, w kolejnych liniach kodu, powracamy do właściwego zakresu. Na koniec, korzystając z omówionej, w poprzedniej części kursu funkcji set_led_brightness(), ustawiamy jasność poszczególnych kanałów diody RGB.
Kompilujemy oraz uruchamiamy program na mikrokontrolerze. Jeśli środowisko nadal nie widzi części plików lub zmiennych, możemy zmusić je do przeindeksowania zawartości projektu – wybieramy w tym celu z menu, w górnej części okna, polecenie: Project " C/C++ Index " Freshen All Files. Należy też pamiętać o błędzie związanym z biblioteką „m”. Sposób jego rozwiązania został podany w poprzedniej części – w ustawieniach linkera musimy odznaczyć opcję dołączania biblioteki „m” oraz dodać ją ręcznie na liście dołączanych bibliotek.
Od teraz, po wciśnięciu w programie PuTTY klawiszy „q”, „w” i „e”, zwiększymy jasność świecenia poszczególnych kolorów składowych diody RGB – odpowiednio: czerwonego, zielonego i niebieskiego. Analogicznie, klawiszami „a”, „s” i „d” zmniejszymy ich jasność.
Przerwania
W tej chwili, przez większość czasu swojej pracy, nasz procesor oczekuje na odebranie od użytkownika danych. Po ich odebraniu, interpretuje je, wykonuje stosowną akcje i powraca do oczekiwania. To rozwiązanie sprawdza się w przypadku prostych ćwiczeń. Co jednak w sytuacji, gdy chcielibyśmy w międzyczasie wykonywać jakieś inne operacje? Przykładowo – obsłużyć połączenia TCP/IP, przerysowywać zawartość wyświetlacza czy zmierzyć odległość od przeszkody, do której zbliża się nasz robot itp.
Przerwania mogą oczywiście generować również inne interfejsy i peryferiale. Mogą one także być wywoływane z zewnątrz – po zmianie stanu wybranego pinu. Możemy ustawić dowolny licznik, tak, aby wywoływał w ustalonych odstępach czasu przerwania (najczęściej w momencie resetu wartości licznika). Przerwaniom możemy również przypisywać priorytety – te o niższym priorytecie nie mogą przerywać tych o wyższym. Procesor, pomiędzy wykonywaniem rozkazów sprawdza wektor przerwań – jeśli jakieś przerwanie wymaga obsłużenia, w wektorze tym znajdzie się odpowiednio ustawiona flaga – w ten sposób, przerwania o różnych priorytetach mogą być kolejkowanie.
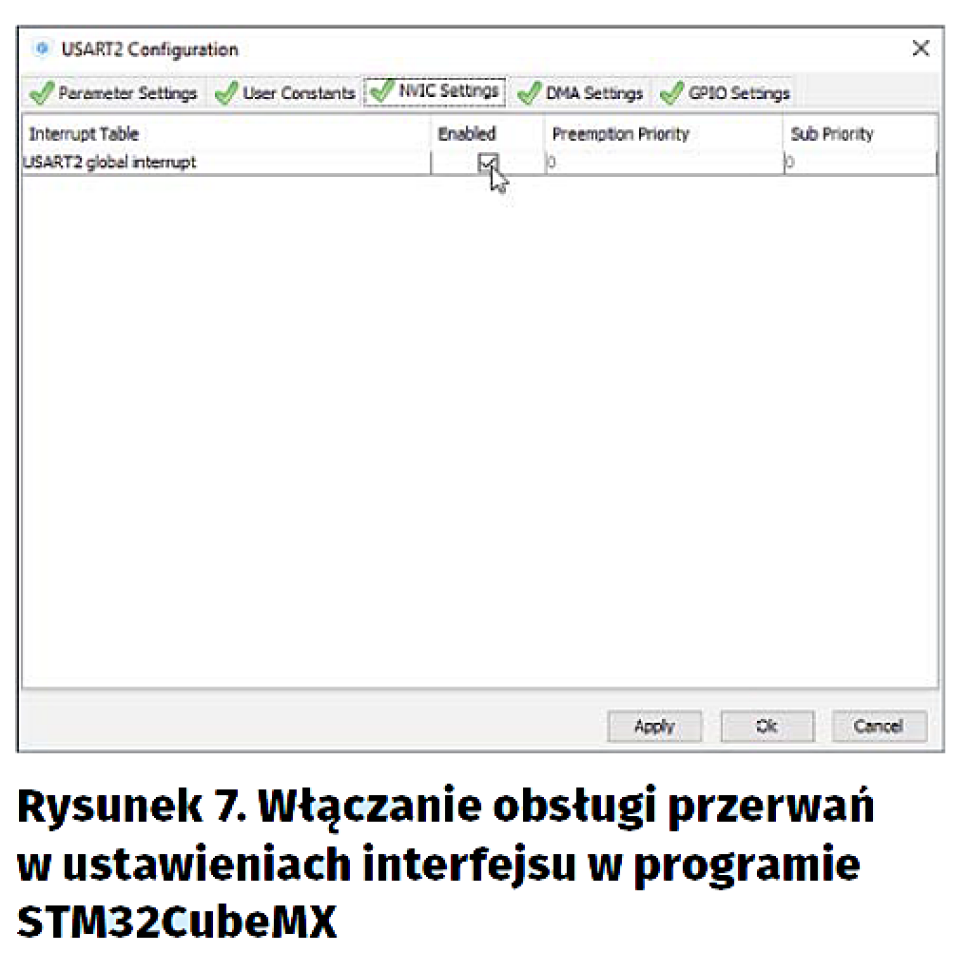
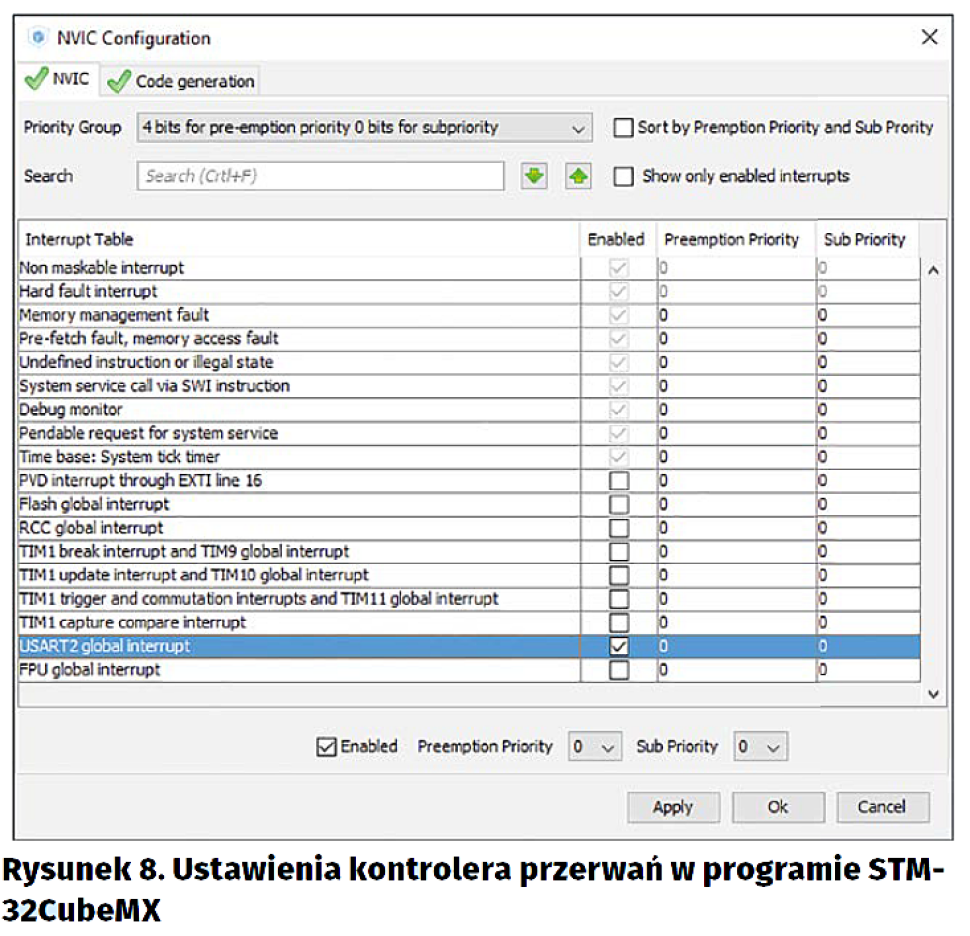
Aby uruchomić generowanie przerwań przez interfejs UART, wracamy do programu STM32CubeMX i wczytujemy w nim nasz projekt. Następnie przechodzimy do zakładki Configuration i wybieramy interfejs USART z sekcji Connectivity. W nowootwartym oknie przechodzimy do zakładki NVIC Settings i zaznaczamy jedynego checkboxa na liście (w polu Enable – rysunek 7). Alternatywnie, w zakładce Configuration, moglibyśmy wybrać opcje NVIC – wtedy wyświetli nam się lista wszystkich możliwych do uruchomienia w danym projekcie przerwań. Możemy tam także ustawiać ich priorytety (rysunek 8).
Po uruchomieniu mikrokontrolera, wykonany zostanie kod z sekcji „USER CODE 2”. W ostatniej linii tego kodu, korzystając z funkcji HAL_UART_Receive_IT(), włączamy przerwanie interfejsu UART. Składnia tej funkcji jest niemal identyczna jak składnia funkcji odbierającej dane do bufora. Tutaj również wskazujemy, gdzie zapisany ma zostać odebrany ciąg oraz jak długi jest bufor. Przed przeskoczeniem do wykonania funkcji przerwania, do wskazanego bufora zapisane zostaną odebrane dane. Żeby bufor był dostępny z zarówno z poziomu funkcji main(), jak i funkcji obsługującej przerwanie, deklarujemy go jako zmienną globalną w sekcji USER CODE PV. Na końcu funkcji obsługującej przerwanie, ponawiamy wywołanie funkcji uruchamiającej przerwanie – włącza ona obsługę przerwania, aż do jego następnego wywołania.
Kody źródłowe przykładów oraz projektu programu STM32CubeMX poszczególnych przykładów, dostępne są na serwerze FTP. Następną część kursu poświęcimy układowi ESP8266. Dodamy dzięki niemu do naszego mikrokontrolera obsługę sieci Wi-Fi oraz stosu TCP/IP. Utworzymy także stronę WWW, za której pomocą będziemy sterowali „naszą” diodą RGB.
Aleksander Kurczyk