 Zaloguj
Zaloguj



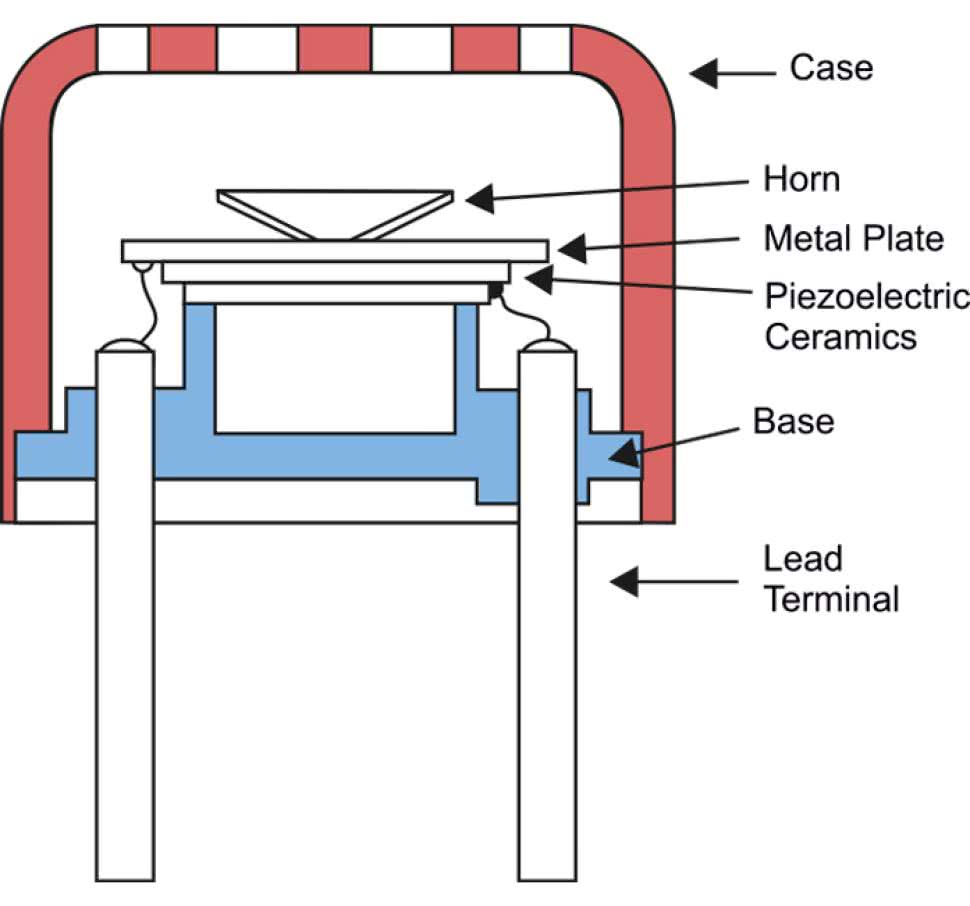
Niskoczęstotliwościowe przetworniki ultradźwiękowe – dzięki nieskomplikowanej budowie, niskiej cenie i relatywnie prostemu podłączeniu – są szeroko stosowane w obszarze robotyki, motoryzacji, metrologii, itp. Mówiąc o przetwornikach niskiej częstotliwości mamy zwykle na myśli elementy, których częstotliwość rezonansowa mieści się w przedziale do około stu kiloherców. Konstrukcję popularnego, konwencjonalnego przetwornika przeznaczonego do pracy w powietrzu zaprezentowano na rysunku 1, a przykładowe elementy pokazaliśmy na fotografii 1.

Najpopularniejsze, niedrogie przetworniki tego typu – o półotwartej konstrukcji (z membraną zasłoniętą jedynie przez metalową siatkę lub perforowane czoło tworzywowej obudowy) – rzecz jasna zupełnie nie nadają się do użycia ani pod wodą, ani też w bezpośrednim kontakcie z jakąkolwiek powierzchnią. Ostatnia wymieniona sytuacja ma natomiast miejsce np. w przypadku głowic ultrasonograficznych, które do prawidłowej pracy wymagają minimalizacji różnic w impedancji akustycznej pomiędzy tkanką (skórą pacjenta), a czołem głowicy – z tego też względu badania nie da się wykonać bez pokrycia skóry specjalnym żelem, gdyż suchy kontakt głowicy z powierzchnią ciała praktycznie blokuje propagację fal w głąb tkanek. Bezpośredni montaż jest też stosowany w przypadku przepływomierzy, zakładanych za pomocą opasek na rurę, transportującą mierzone medium – w takich zastosowaniach można najczęściej znaleźć piezoelektryczne przetworniki dyskowe, w tym przypadku mamy jednak zwykle do czynienia z wyższymi częstotliwościami na poziomie 1 MHz (fotografia 2).

Przemysłowe i motoryzacyjne zastosowania ultradźwięków
Jak wspomnieliśmy na początku, oprócz zaawansowanych aplikacji obrazowania ultradźwiękowego w ciągłym użyciu pozostają także znacznie prostsze techniki pomiarowe, które możemy podzielić na dwie zasadnicze grupy.
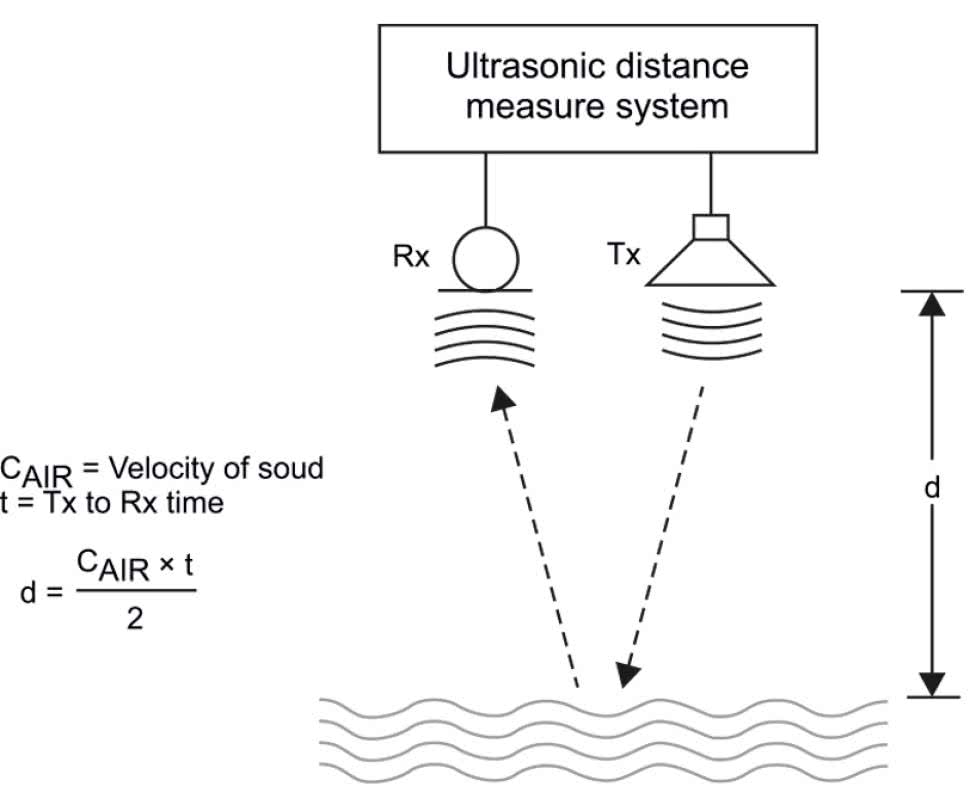
- Pomiary odległości – najprostsza i jednocześnie najczęściej stosowana metoda pomiaru odległości wykorzystuje zjawisko odbicia wiązki ultradźwięków od przeszkody. Jest to rzecz jasna pośrednia metoda pomiaru, gdyż w rzeczywistości mierzony jest czas, upływający pomiędzy momentem wysłania wiązki przez nadajnik, a odbiorem jej echa przez drugi przetwornik (odbiorczy) bądź ten sam komponent, który posłużył do wyemitowania ultradźwięków. Sytuację pomiarową schematycznie zaprezentowano na rysunku 2. Przy znanej prędkości propagacji fal akustycznych w ośrodku można łatwo wyliczyć odległość pomiędzy dalmierzem, a przeszkodą, stosując wzór (1):
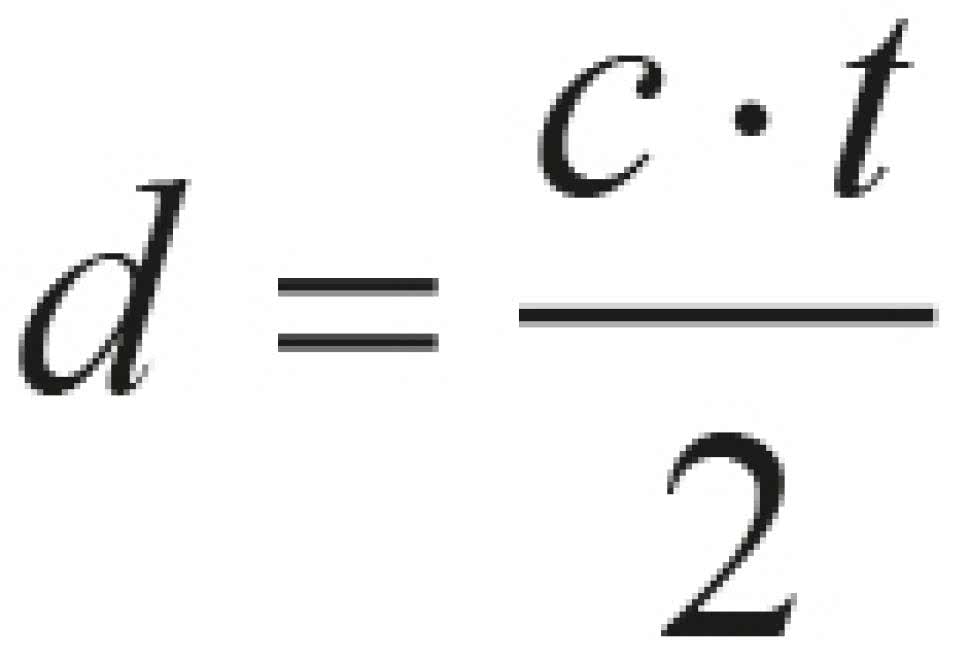
gdzie: d – odległość dalmierza od przeszkody, c – prędkość propagacji fali akustycznej w ośrodku w danych warunkach, t – czas od chwili wysłania wiązki do momentu powrotu jej echa.
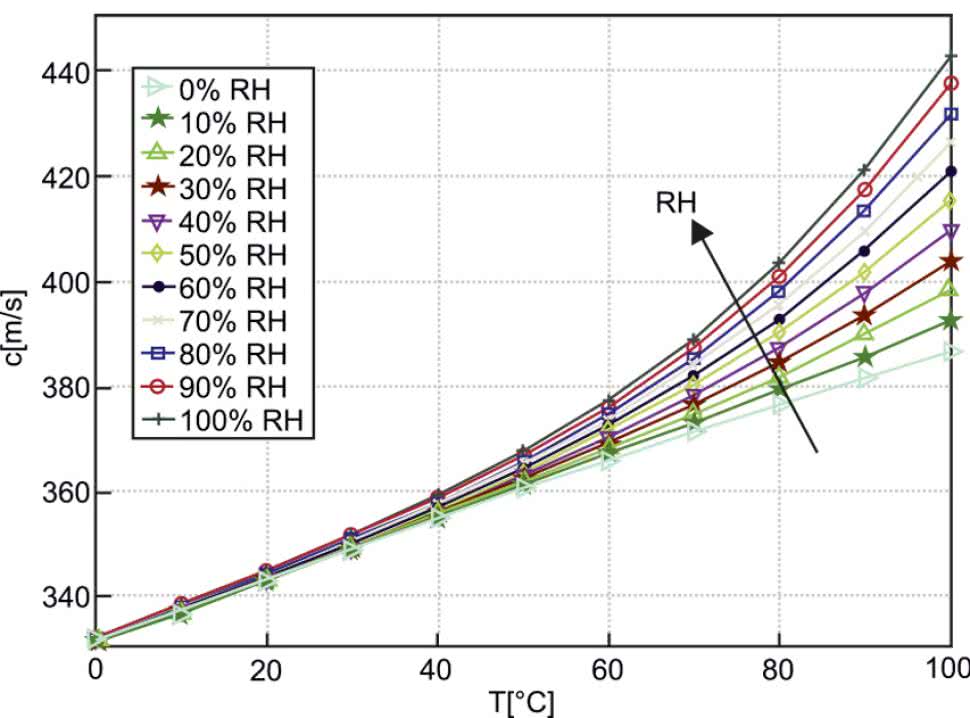
Nieprzypadkowo zwróciliśmy tutaj uwagę na warunki, w których dokonywany jest pomiar – prędkość dźwięku w dużej mierze zależy bowiem od szeregu parametrów ośrodka: w przypadku powietrza szczególne znaczenie mają temperatura i wilgotność, choć istnieją także zależności od składu powietrza (w tym koncentracji CO2) oraz ciśnienia. W normalnych warunkach atmosferycznych (tj. przy ciśnieniu 1013 hPa) zwykle możemy skupić się jedynie na dwóch wymienionych wcześniej parametrach – stosowne wykresy zależności prędkości dźwięku od temperatury i wilgotności zaprezentowano na rysunku 3.
Pomiary odległości z użyciem metody TOF (Time-Of-Flight) są stosowane m.in. w:
- robotyce mobilnej – do wyznaczania odległości robota od przeszkody,
- medycynie – do pomiaru wzrostu pacjentów,
- motoryzacji – na tej zasadzie działają czujniki parkowania (zwane też czujnikami cofania),
- marynistyce – do określania głębokości dna przez różnego rodzaju jednostki pływające,
- wędkarstwie – w echosondach wędkarskich do badania głębokości i struktury dna na obszarze łowiska oraz do „namierzania” ryb,
- gospodarce wodnej – do pomiaru przepływu cieczy w rurociągach (strumień cieczy zmienia czas powrotu echa zależnie od kierunku i prędkości przepływu medium).
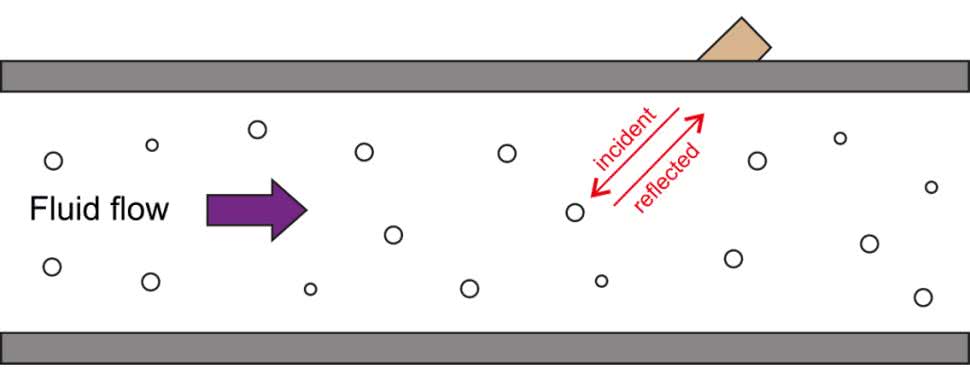
- Pomiary dopplerowskie – falowa natura ultradźwięków daje konstruktorom szerokie możliwości w zakresie pomiaru prędkości. Efekt Dopplera, polegający na powstaniu odchyłki częstotliwości fali odbitej od przeszkody poruszającej się względem układu pomiarowego (w kierunku zgodnym z kierunkiem propagacji fali) [1], jest używany m.in. do detekcji ruchu w systemach alarmowych (głównie w obszarze motoryzacyjnym), czy też do pomiaru przepływu cieczy oraz gazów w rurociągach (rysunek 4). Podstawowe równanie, pozwalające określić „nową” częstotliwość zmienioną w wyniku działania efektu Dopplera, wyraża wzór (2):
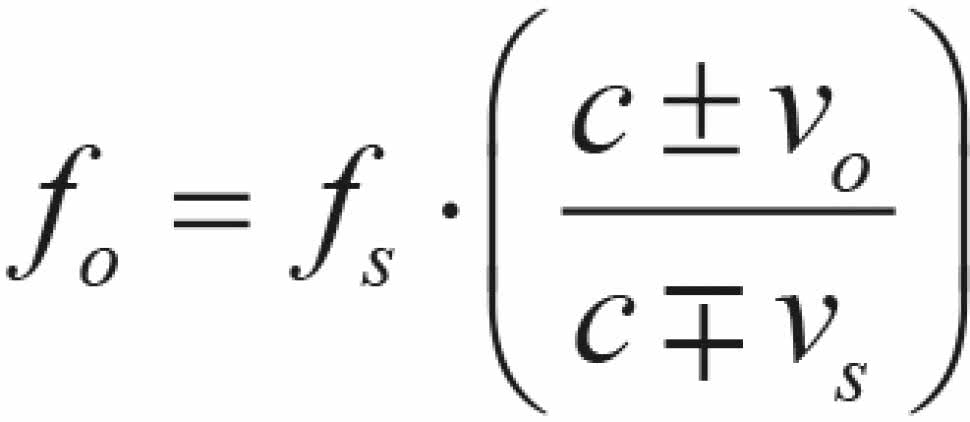
gdzie: fo – częstotliwość odebrana przez obserwatora, fs – częstotliwość fali wysłanej przez źródło, c – prędkość dźwięku w ośrodku, vo – prędkość obserwatora względem ośrodka, vs – prędkość źródła względem ośrodka. Górne znaki w liczniku i mianowniku odnoszą się do sytuacji, w której obserwator i źródło zbliżają się do siebie, zaś dolne – do sytuacji przeciwnej. W przypadku gdy źródło lub obserwator nie poruszają się względem otoczenia, odpowiednią wielkość (vs lub vo) należy przyjąć jako równą zeru. Warto tutaj zwrócić uwagę na fakt, że prędkości vs oraz vo są wyrażone względem otaczającego ośrodka, zatem w przypadkach takiej samej prędkości względnej źródła i obserwatora, ale w różnych konfiguracjach (stacjonarny obserwator lub stacjonarne źródło), wynikowa częstotliwość fo będzie miała nieco inne wartości.
Portfolio front-endów ultradźwiękowych marki Texas Instruments
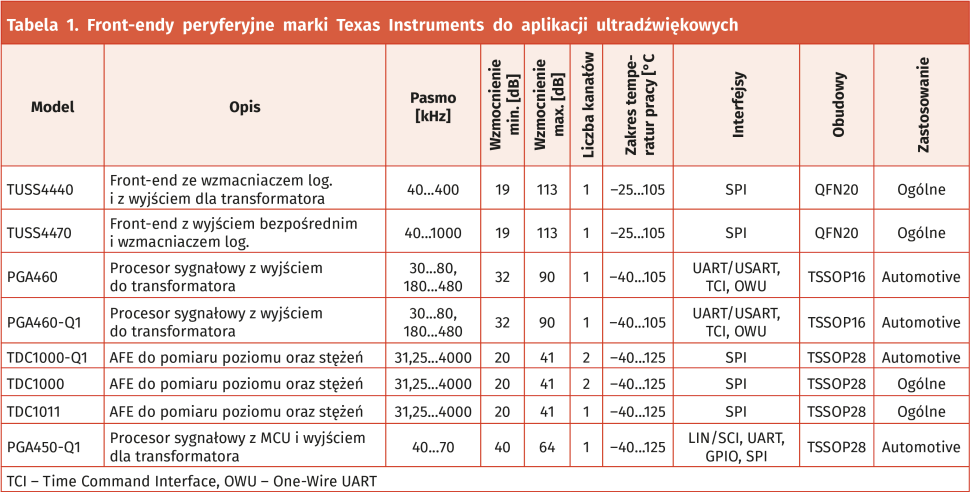
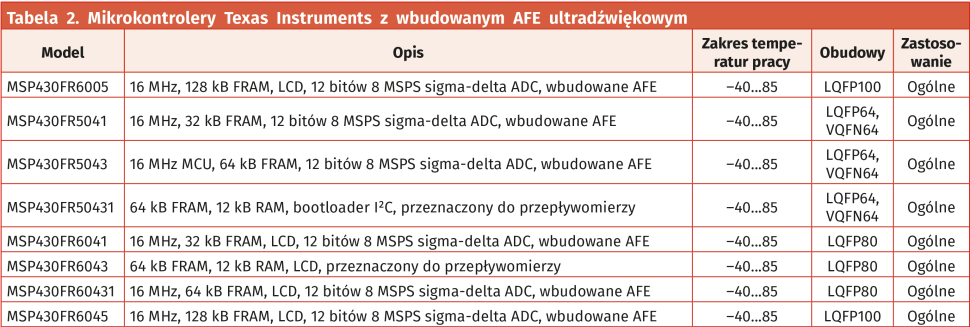
Co ciekawe, pomimo dużej uniwersalności i popularności metod ultradźwiękowych, na rynku dostępnych jest stosunkowo mało specjalizowanych front-endów przeznaczonych do tego typu aplikacji. O ile w tańszych, szeroko rozpowszechnionych urządzeniach (takich jak niedrogie moduły dalmierzy ultradźwiękowych stosowanych np. w robotyce amatorskiej, czy też akcesoryjne zestawy samochodowych czujników parkowania) są zwykle słabo udokumentowane układy scalone ASIC, to dla aplikacji profesjonalnych tego typu rozwiązania zdecydowanie nie będą najlepszym wyborem. Z pomocą przychodzi tutaj firma Texas Instruments, która jako jedyna opracowała dość szerokie portfolio ultradźwiękowych układów AFE, co więcej – znajdziemy wśród nich zarówno układy peryferyjne (tabela 1), jak i specjalistyczne mikrokontrolery z wbudowanym AFE ultradźwiękowym (tabela 2).
TUSS4440
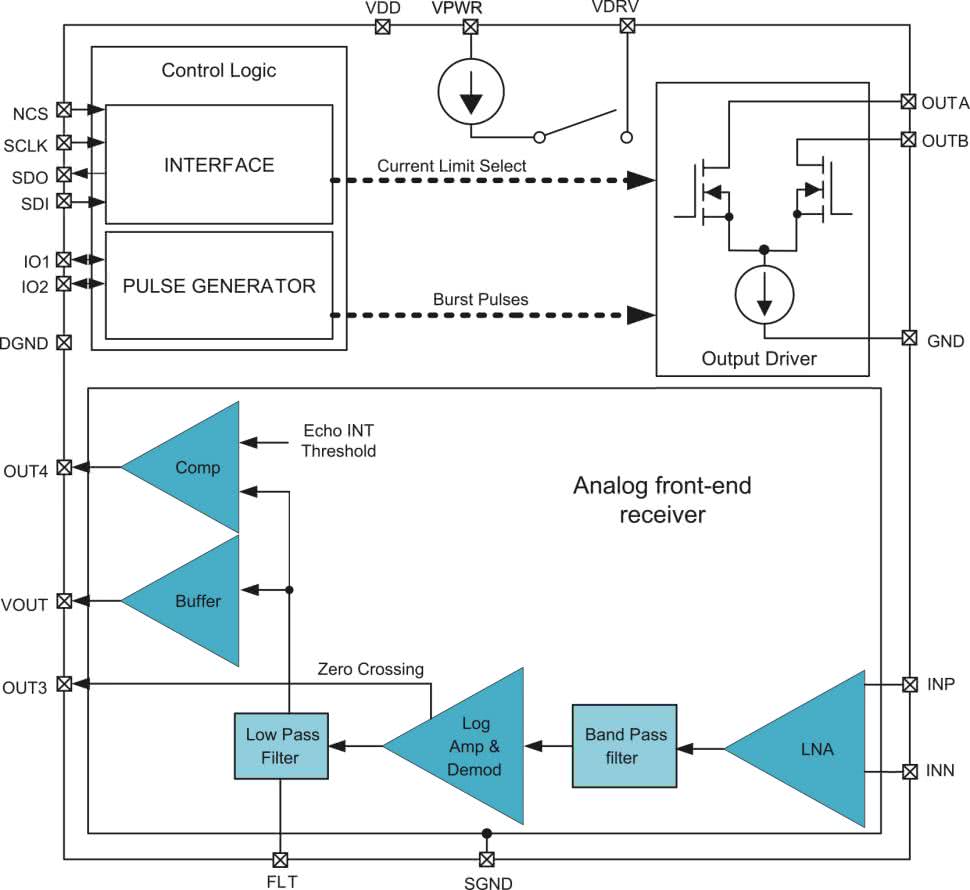
Schemat funkcjonalny układu TUSS4440 zaprezentowano na rysunku 5. Front-end jest przeznaczony do pracy w miernikach odległości, poziomu cieczy/mediów stałych czy też pozycji i bazuje na stosunkowo prostym układzie analogowym, połączonym z cyfrowym kontrolerem konfiguracyjnym, wyposażonym w interfejs SPI. AFE wspiera częstotliwości nadawcze w zakresie od 40 kHz do 400 kHz.
Tor odbiorczy
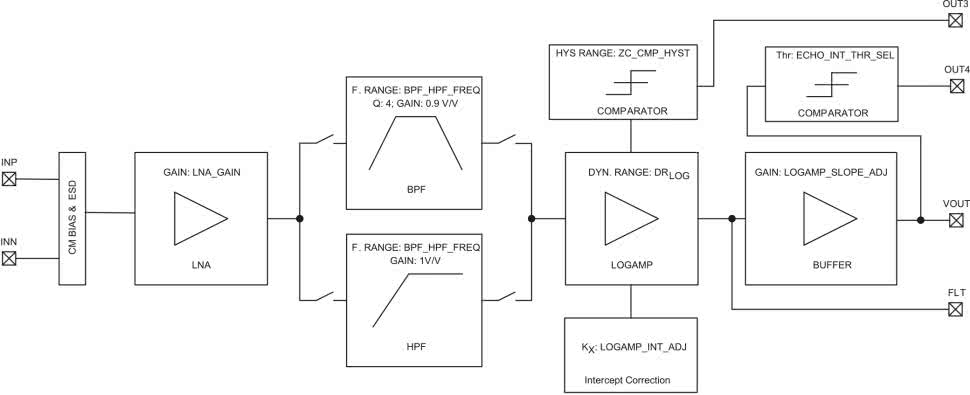
Tor kondycjonowania sygnałów echa (rysunek 6) ma swój początek w postaci wzmacniacza niskoszumnego (LNA) o wzmocnieniu regulowanym cyfrowo w sekwencji 10/12,5/15/20 V/V, za którym znajduje się filtr BPF o wzmocnieniu w paśmie przepustowym równym 0,9 V/V. Charakterystykę filtru w dość szerokim zakresie kształtuje kilka pól bitowych, zawartych w rejestrach BPF_CONFIG_1 i BPF_CONFIG_2: dobroć można ustawić na wartość 2, 3, 4 lub 5, zaś częstotliwość środkową ustala się za pomocą sześciu najmłodszych bitów BPF_HPF_FREQ rejestru BPF_CONFIG_1. Front-end umożliwia wprowadzenie niewielkiego przesunięcia częstotliwości środkowej względem ustawień dokonanych za pomocą BPF_HPF_FREQ, co dodatkowo rozszerza zakres strojenia. Istnieje także możliwość wyłączenia funkcji BPF i wykorzystania bloku prostego filtru górnoprzepustowego (HPF) o częstotliwości granicznej 50, 100, 200 lub 400 kHz i wzmocnieniu w paśmie przepustowym 1 V/V.
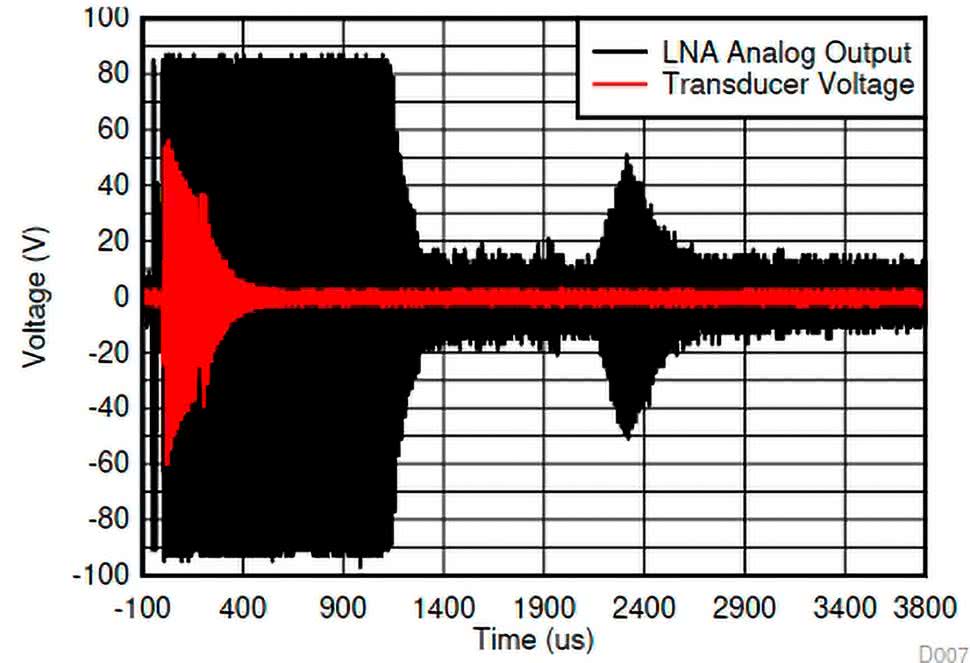
Najważniejszą częścią toru odbiorczego TUSS4440 jest wzmacniacz logarytmiczny, pełniący też rolę demodulatora. Konstrukcja bloku opiera się na wielostopniowym układzie wzmacniaczy, z których pierwszy i/lub ostatni mogą być wyłączone w celu obniżenia poboru mocy. Zastosowanie charakterystyki logarytmicznej jest nieprzypadkowe – dzięki takiemu zabiegowi silne sygnały echa (uzyskane ze względu na małą odległość od przeszkody oraz niskie tłumienie fal przez jej materiał) są wzmacniane w znacznie mniejszym stopniu, niż nawet bardzo słabe sygnały spowodowane dużą odległością mierzoną i/lub silnym tłumieniem (rysunek 7). Użycie tego typu wzmacniacza jest zatem prostym i efektywnym rozwiązaniem, mającym na celu ominięcie konieczności stosowania układu AGC – wzmacniacz automatycznie dostosowuje wzmocnienie do amplitudy sygnałów otrzymanych z przetwornika odbiorczego (a ściślej rzecz biorąc – z wyjścia filtra BPF/HPF). Pęk charakterystyk przejściowych toru odbiorczego w zależności od włączenia poszczególnych stopni wzmocnienia zaprezentowano na rysunku 8.
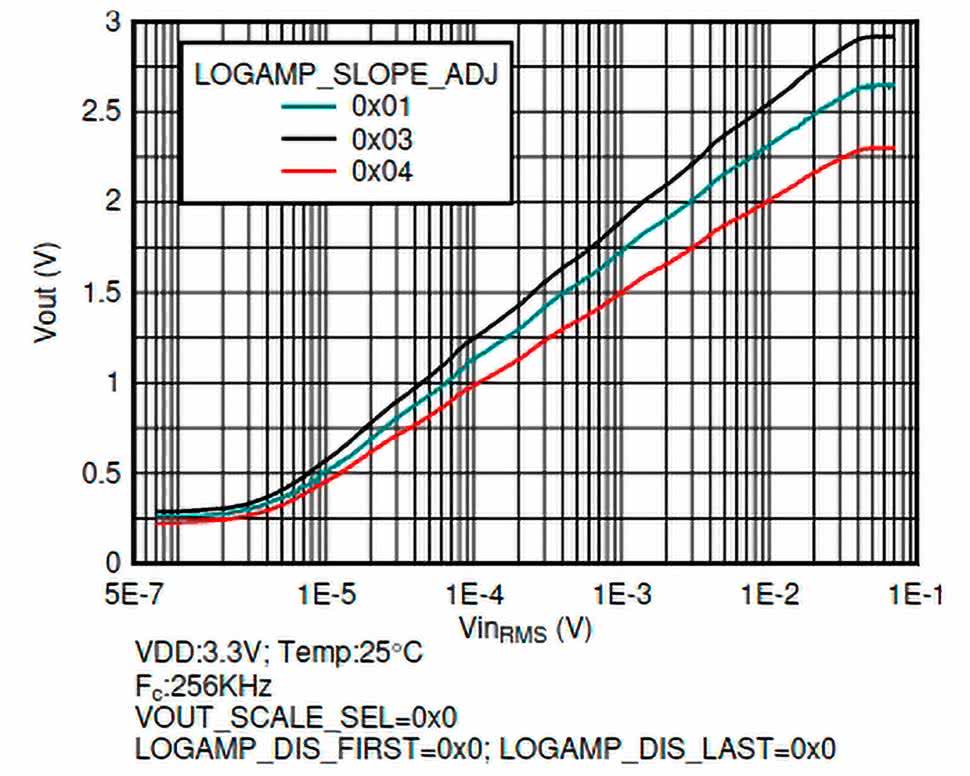
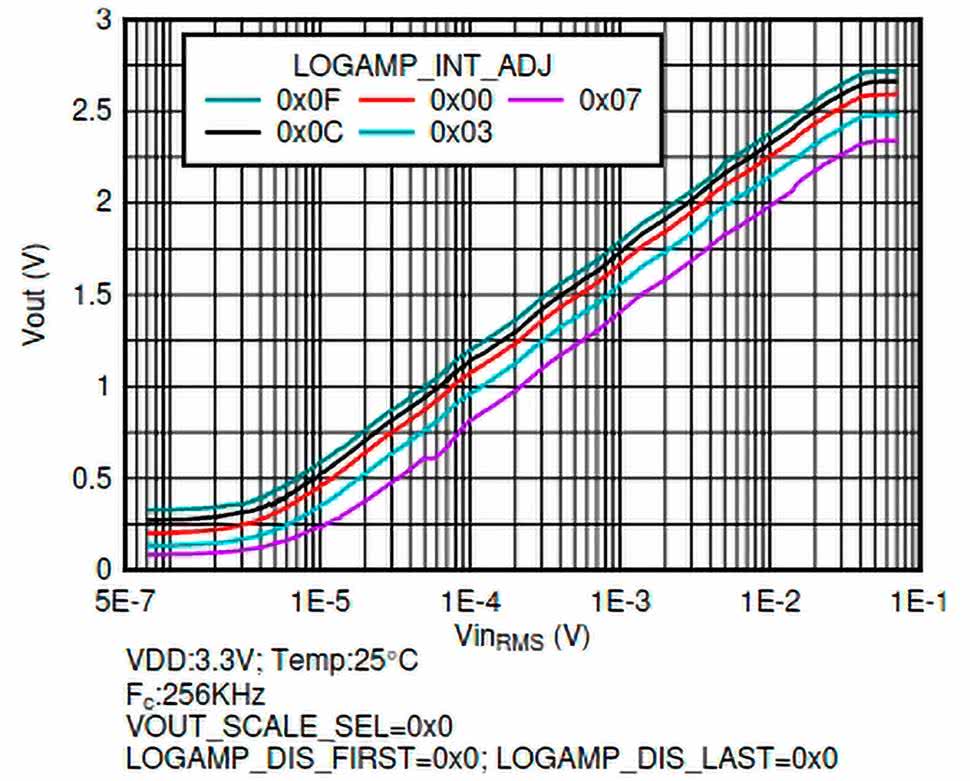
Co ciekawe, do dyspozycji użytkownika jest także kilka dodatkowych ustawień wzmacniacza logarytmicznego. Pole bitowe LOGAMP_SLOPE_ADJ umożliwia modyfikację nachylenia charakterystyki przejściowej przy zachowaniu (w przybliżeniu) tego samego poziomu napięcia początkowego. Z kolei bity LOGAMP_INT_ADJ pozwalają na przesunięcie całej charakterystyki – stosowne wykresy zaprezentowano na rysunkach 9 i 10.
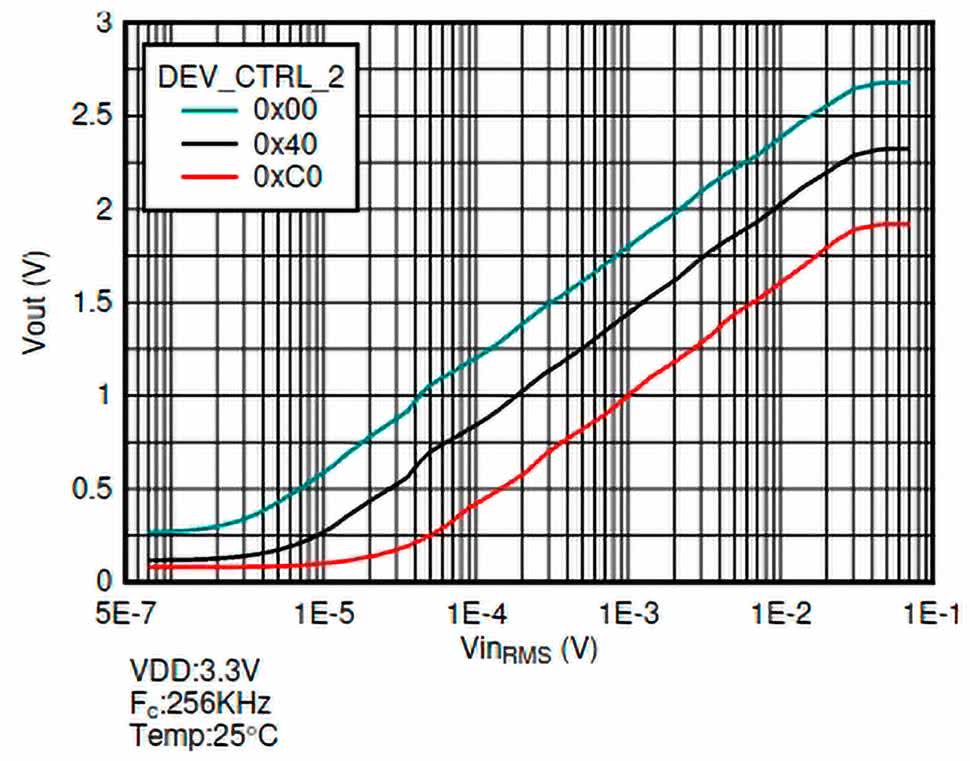
Niezwykle użyteczną funkcją jest skalowanie napięcia wyjściowego, zrealizowane za pomocą bitu VOUT_SCALE_SEL znajdującego się w rejestrze DEV_CTRL_2. Ustawienie logicznego zera mapuje zakres VOUT na zakres do 3,3 V, zaś logiczna jedynka wymusza przeskalowanie do 5,0 V. Takie rozwiązanie znakomicie ułatwia dopasowanie układu do zewnętrznego przetwornika ADC, zwalniając konstruktora z konieczności stosowania dodatkowego wzmacniacza lub tłumika sygnałowego.
Do dyspozycji użytkownika są trzy wyjścia – oprócz głównego (VOUT) można skorzystać także z linii:
- OUT3 – wyjście komparatora wykrywającego przejścia przez zero w sygnale echa. Umożliwia pomiar częstotliwości w celu zweryfikowania, czy dany przebieg faktycznie jest sygnałem echa wiązki nadanej przez front-end, czy też zakłóceń zewnętrznych z innego źródła;
- OUT4 – wyjście komparatora przeznaczonego do detekcji echa, tj. sygnału o amplitudzie przekraczającej poziom ustalony za pomocą bitów ECHO_INT_THR_SEL.
Dodatkowe wyprowadzenie FLT umożliwia natomiast podłączenie kondensatora współpracującego z filtrem dolnoprzepustowym, znajdującym się na wyjściu wzmacniacza logarytmicznego.
Tor nadawczy
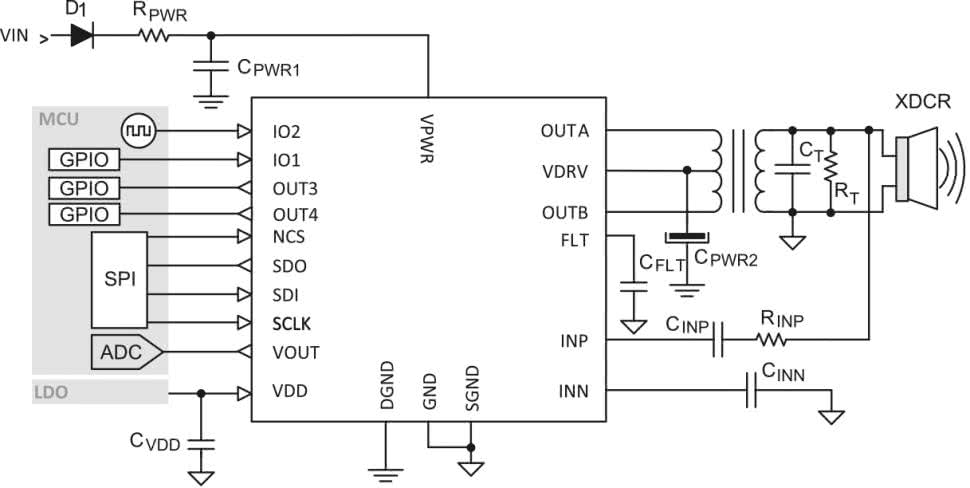
Front-end TUSS4440 jest zaprojektowany w sposób umożliwiający współpracę z przetwornikiem nadawczym za pośrednictwem miniaturowego transformatora, dopasowującego impedancję oraz podwyższającego poziom napięcia wysterowania nadajnika. Tego typu elementy, określane często mianem IFT transformer (fotografia 3), są powszechnie spotykane w wielu urządzeniach bazujących na przetwornikach ultradźwiękowych (m.in. w dopplerowskich monitorach tętna płodu, czujnikach parkowania – fotografia 4, itp.).


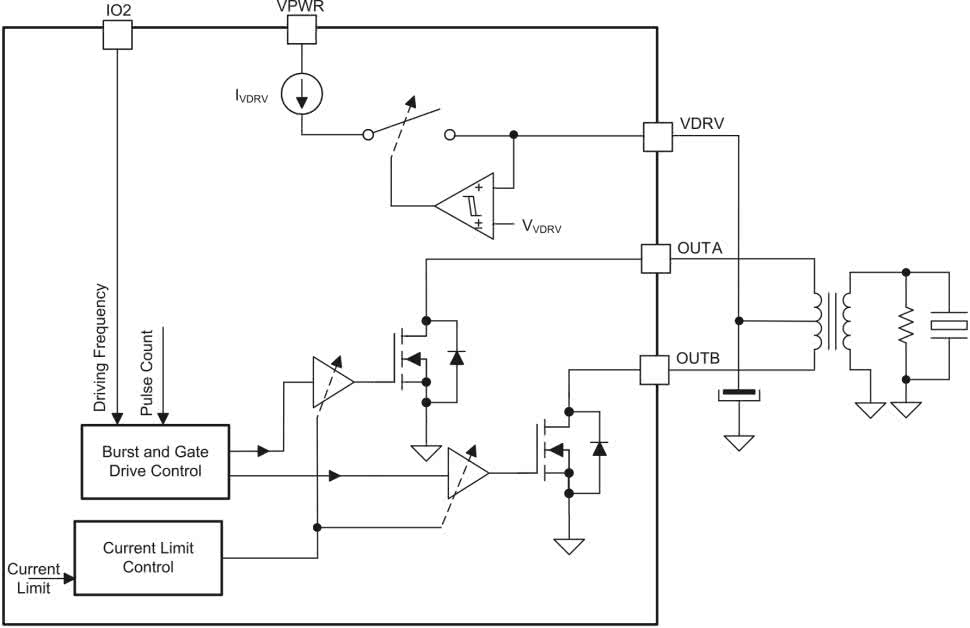
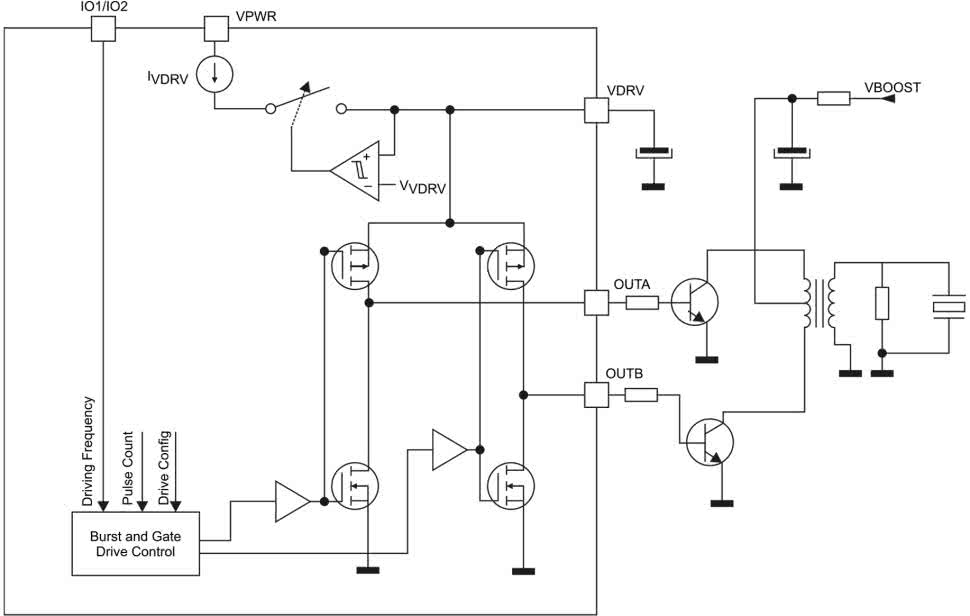
Stopień wyjściowy (rysunek 11) został zrealizowany za pomocą dwóch tranzystorów FET w topologii low-side (otwarty dren), współpracujących z cyfrowo przestrajanym źródłem prądowym. Środkowy odczep uzwojenia pierwotnego transformatora należy podłączyć do linii VDRV, wraz z kondensatorem pełniącym rolę zasobnika energii. Kondensator ten jest ładowany cyklicznie przez wbudowane źródło prądowe, zasilane z napięcia podłączonego do pinu VPWR, zaś proces ładowania jest sterowany przez wewnętrzny kontroler według wartości bitów VDRV_VOLTAGE_LEVEL (poziom napięcia), VDRV_CURRENT_LEVEL (natężenie prądu) oraz VDRV_HI_Z (zezwolenie na działanie układu regulatora). Takie dość nietypowe rozwiązanie umożliwia bardzo prostą konwersję napięcia zasilania „w dół”, bez konieczności stosowania przetwornicy DC/DC lub nieefektywnego stabilizatora liniowego, a dodatkowo – zabezpiecza wyjścia OUTA/OUTB przed przeciążeniem, które mogłoby mieć miejsce w niektórych niekorzystnych konfiguracjach układowych.
Kontroler stopnia wyjściowego obsługuje cztery tryby generowania paczek impulsów, określane jako IO_MODE0...3 i ustawiane za pomocą dedykowanego pola bitowego w rejestrze DEV_CTRL_3.
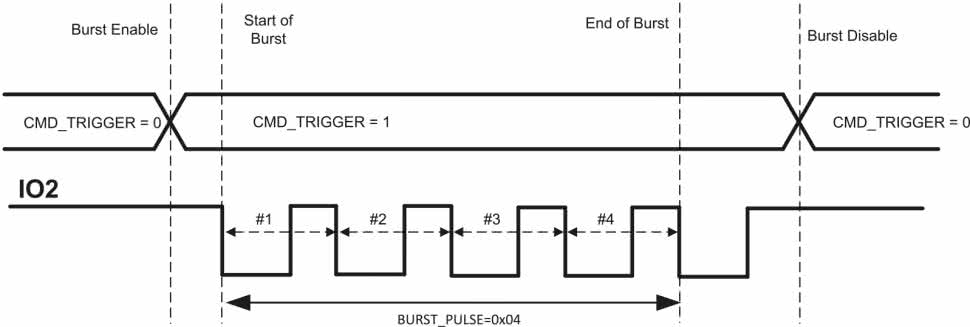
- W trybie IO_MODE0 (rysunek 12) start nadawania ma miejsce po ustawieniu przez układ nadrzędny (zwykle mikrokontroler) bitu CMD_TRIGGER w rejestrze TOF_CONFIG. Następnie układ oczekuje impulsów na linii IO2 i – począwszy od pierwszego zbocza opadającego – zlicza kolejne okresy sygnału. Po wysłaniu impulsów w liczbie równej nastawie pola bitowego BURST_PULSE (lub po wyzerowaniu bitu CMD_TRIGGER) układ kończy procedurę nadawania i przechodzi w tryb nasłuchu;
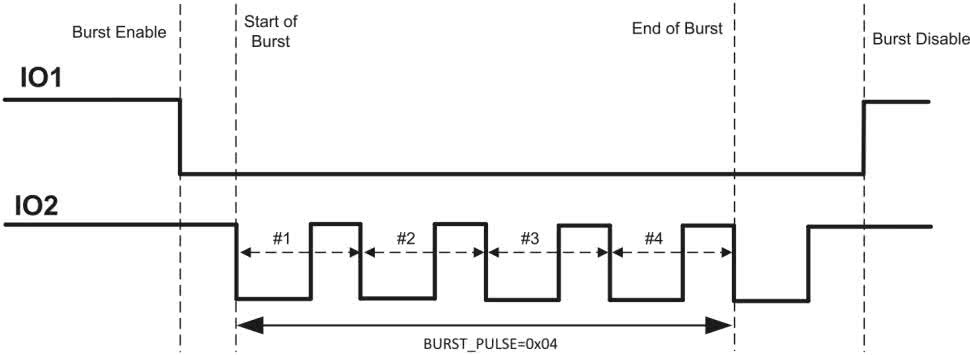
- Tryb IO_MODE1 (rysunek 13) jest zbliżony do poprzednio omówionego z tą różnicą, że rolę bitu CMD_TRIGGER pełni sprzętowa linia IO1;
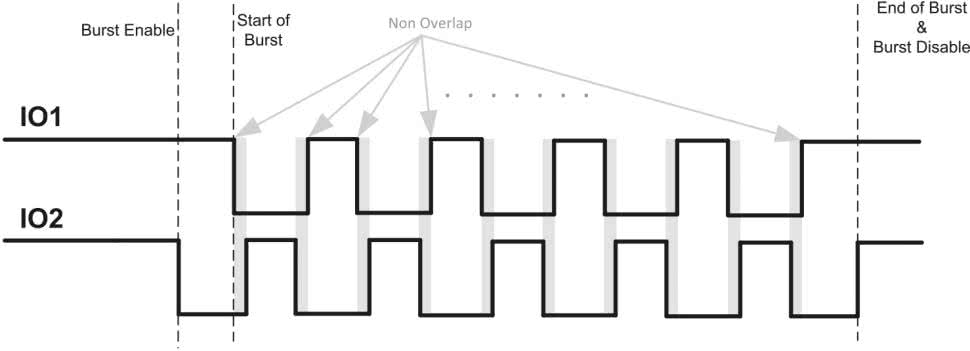
- W trybie IO_MODE2 (rysunek 14) sygnałem zezwolenia na wygenerowanie paczki nadawczej jest pierwsze zbocze opadające na którejkolwiek z linii IO1 lub IO2, zaś właściwy początek nadawania ma miejsce w momencie pierwszego, następującego po nim zbocza na linii IO1. W tym trybie – który można by kolokwialnie określić jako „manualny” – użytkownik musi sam podać naprzemienne serie impulsów w odpowiedniej fazie, które zostaną „bezpośrednio” przesłane do wyjść OUTA/B. Co ważne – w tym przypadku to do użytkownika należy dopilnowanie, by w żadnym momencie nie panował stan wysoki jednocześnie na obu wejściach IO1/2 (w myśl zasady break-before-make). Na szczęście, nowoczesne mikrokontrolery (np. STM32) są w stanie z łatwością wygenerować odpowiednie sygnały sterujące z zachowaniem krótkiego okresu przerwy pomiędzy impulsami dodatnimi. W tym trybie pracy wbudowany licznik cykli jest nieaktywny;
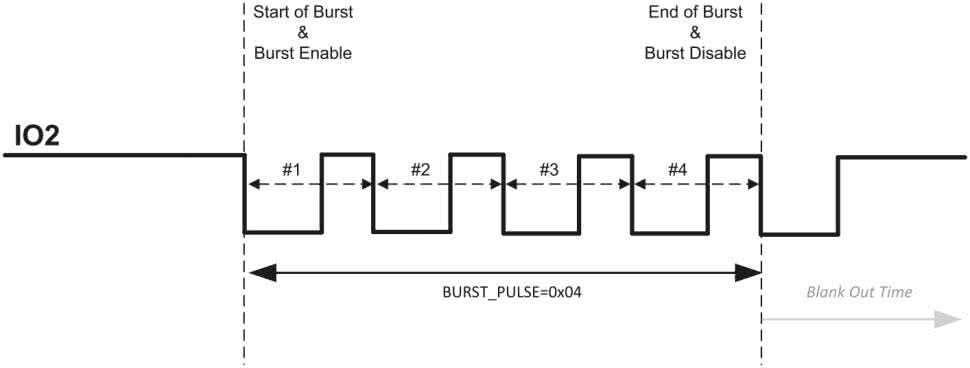
- Najprostszy ze wszystkich czterech trybów pracy – IO_MODE3 (rysunek 15) – polega na podaniu paczki impulsów tylko na wejście IO2 – pierwsze zbocze opadające rozpoczyna procedurę i uruchamia zliczanie, zaś po odliczeniu zadanej liczby cykli, wyjścia są przełączane w tryb nieaktywny.
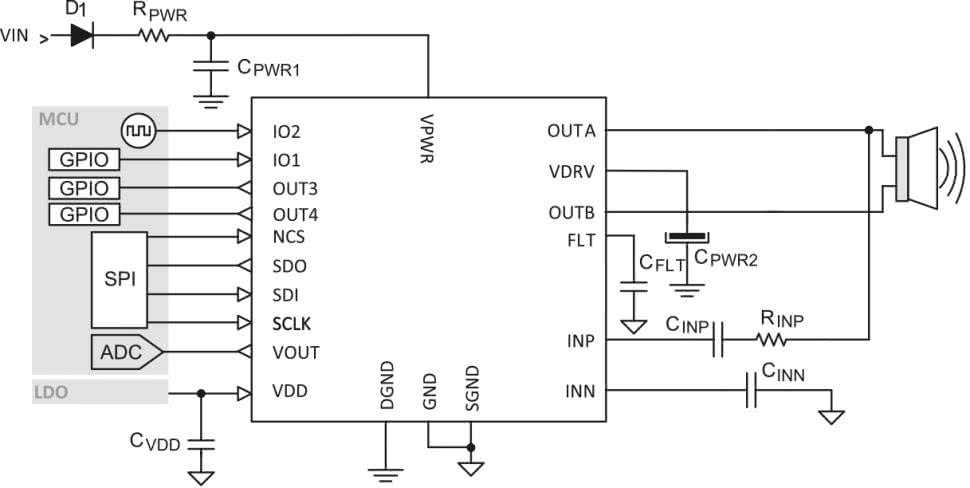
Warto dodać, że konieczność podania sygnału taktującego z zewnętrznego źródła, wbrew pozorom, nie stanowi utrudnienia implementacyjnego, lecz sporą zaletę – zastosowanie stabilnego źródła (np. timera sprzętowego mikrokontrolera, taktowanego dobrym rezonatorem kwarcowym lub TCXO) – pozwala bardzo precyzyjnie ustalić częstotliwość w taki sposób, by przetwornik nadawczy pracował najbardziej efektywnie (tj. najbliżej swojej częstotliwości rezonansowej). Dla ścisłości należy dodać, że nic nie stoi na przeszkodzie, by front-end TUSS4440 był stosowany w urządzeniu z jednym tylko przetwornikiem ultradźwiękowym, pełniącym zarówno rolę nadajnika, jak i odbiornika – trzeba jedynie zastosować odpowiednią sieć RC pomiędzy przetwornikiem, a wejściem toru odbiorczego (rysunek 16). Jej zadaniem będzie bowiem stłumienie sygnału do poziomu bezpiecznego dla czułego wejścia LNA.
TUSS4470
Układ TUSS4470 jest w znacznej części funkcjonalnym odpowiednikiem front-endu TUSS4440 – z tą różnicą, że w pierwszym z wymienionych mamy do czynienia z wyjściem w postaci pełnego mostka H, nie zaś dwóch tranzystorów w konfiguracji otwartego drenu. Takie rozwiązanie umożliwia bezpośrednie wysterowanie przetwornika ultradźwiękowego bipolarnym napięciem w zakresie ±20 V (w przypadku zastosowania wbudowanego regulatora z zewnętrznym kondensatorem).
Uproszczenie układu – spowodowane brakiem induktora IFT (rysunek 17) – jest zatem okupione niższym zakresem amplitud w porównaniu do rozwiązania z transformatorem podwyższającym, jednak istnieje możliwość obejścia tego problemu. Producent przewidział bowiem tryb pracy nazwany pre-driver, w którym wyjścia mostka H umożliwiają uzyskanie napięć odpowiednio wysokich (lecz wciąż bezpiecznych) dla bramek zewnętrznych MOSFETów lub obwodów baza-emiter tranzystorów BJT. Przykład zastosowania front-endu do sterowania zewnętrznym transformatorem (bo i taka możliwość istnieje w przypadku TUSS4470) zaprezentowano na rysunku 18.
TDC1000
W ofercie Texas Instruments znalazł się także znacznie bardziej rozbudowany układ TDC1000, przeznaczony do różnego typu pomiarów ultradźwiękowych w zakresie częstotliwości od 31,25 kHz aż do 4 MHz. Schemat blokowy front-endu zaprezentowano na rysunku 19.
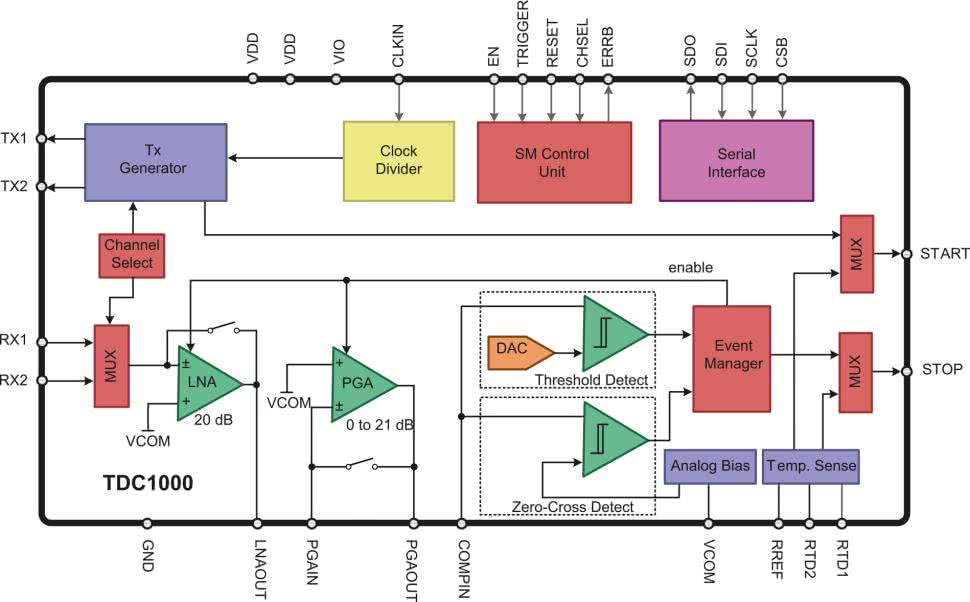
TDC1000 jest front-endem dwukanałowym – wspiera podłączenie dwóch par przetworników RX/TX lub jednej pary przetworników dwufunkcyjnych. Co więcej – zdublowane są nawet wejścia przeznaczone do współpracy z czujnikami temperatury typu RTD (termorezystorami PT1000 lub PT500), niezbędnymi do dokładnej kalibracji systemu pomiarowego. Także w tym przypadku mamy do czynienia z układem, który sam w sobie nie realizuje pomiaru czasu przelotu wiązki (TOF – Time Of Flight) – ten etap procedury pomiarowej musi być wykonany przez zewnętrzny mikrokontroler lub FPGA (choć w przypadku aplikacji wymagających najwyższej dokładności oraz rozdzielczości producent zaleca użycie specjalnie do tego celu stworzonego układu TDC7200, pełniącego rolę przetwornika czas-częstotliwość, czyli… bardzo precyzyjnego stopera).
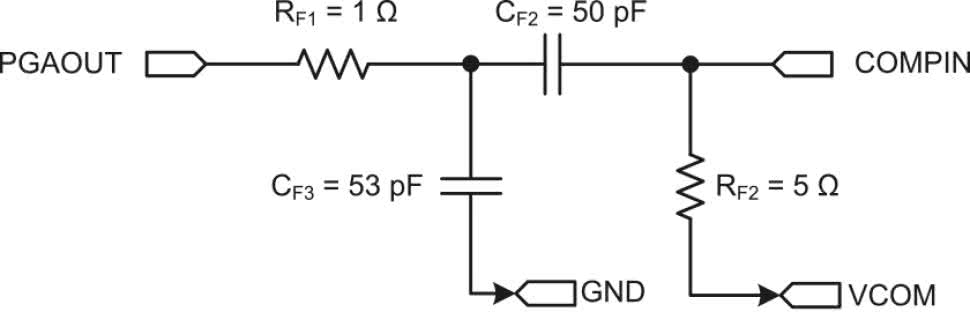
W przypadku układu TDC1000 producent zrezygnował z implementacji wewnętrznych filtrów analogowych oraz wzmacniacza logarytmicznego. Zamiast tego w torze odbiorczym front-endu znalazły się dwa wzmacniacze: LNA (o wzmocnieniu 20 dB) oraz PGA (ustawiany w sekwencji 0-3-6-9-12-15-18-21 dB), przy czym każdy z nich może być wyłączony w razie potrzeby. Co więcej, zamiast bezpośredniego połączenia kaskadowego obu bloków, użytkownik ma do dyspozycji osobne piny zapewniające dostęp do wyjścia LNA (LNAOUT), oraz wejścia i wyjścia PGA (odpowiednio – PGAIN, PGAOUT) oraz wejścia bloku wewnętrznych komparatorów (COMPIN). Takie rozwiązanie daje sporą elastyczność układową, rzecz jasna za cenę zwiększenia liczby komponentów pasywnych. Przykładowo, zalecany przez inżynierów TI filtr pasmowoprzepustowy na wyjściu PGAIN ma postać pokazaną na rysunku 20.
Sekcja komparatorów – podobnie jak w przypadku poprzednio opisanych front-endów – składa się z dwóch bloków: komparatora głównego, stosowanego do detekcji sygnału echa (w tym przypadku komparator współpracuje z przestrajanym odniesieniem w postaci przetwornika DAC) oraz drugiego komparatora, służącego do wykrywania przecięć zera w sygnale wyjściowym PGA (lub – ściślej rzecz ujmując – filtra pasmowoprzepustowego włączonego między PGAOUT a COMPIN). Producent zastosował dość ciekawe rozwiązanie, znakomicie ułatwiające zarówno implementację samego AFE, jak i wszelkich obwodów zewnętrznych – linia VCOM udostępnia napięcie z wbudowanego bufora. Układ ten można utożsamiać z prostą, sztuczną masą o potencjale równym połowie napięcia zasilania, choć do „prawdziwej” sztucznej masy dość mu daleko – maksymalna obciążalność prądowa tej linii wynosi bowiem zaledwie 20 μA. Co ważne, obydwa komparatory są automatycznie zerowane w każdym cyklu pomiarowym (jeszcze przed etapem nasłuchiwania echa).
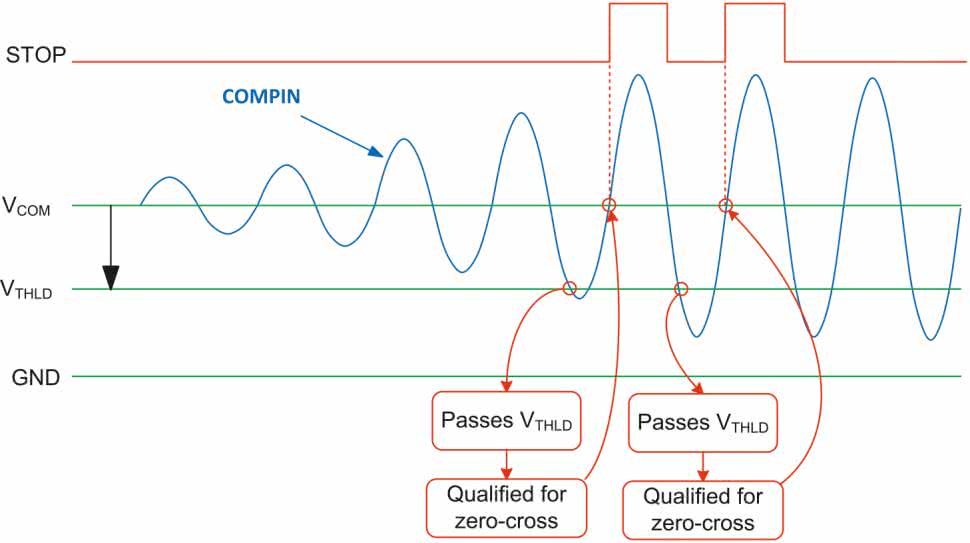
Wyjścia obu komparatorów są skierowane do bloku event manager, bazującego na maszynie stanów i odpowiedzialnego za generowanie sygnałów STOP w zależności od aktualnie wybranego trybu pracy. Po wykryciu przekroczenia przez sygnał wejściowy komparatorów (COMPIN) określonego progu (VTHLD), zaprogramowanego za pomocą przetwornika DAC, maszyna stanów przechodzi w tryb oczekiwania na przejście przez zero – po wystąpieniu takiego stanu natychmiast ustawiany jest stan wysoki na wyjściu STOP (rysunek 21). Rozwiązanie to pozwala zwiększyć dokładność czasową pomiaru, która bezpośrednio przekłada się na minimalizację błędu odczytu właściwej wielkości mierzonej (np. odległości czy też prędkości propagacji ultradźwięków w badanym ośrodku).
Front-end TDC1000 oferuje trzy tryby pomiaru (Mode 0, Mode 1, Mode 2), różniące się liczbą i sposobem podłączenia przetworników oraz działaniem maszyny stanów:
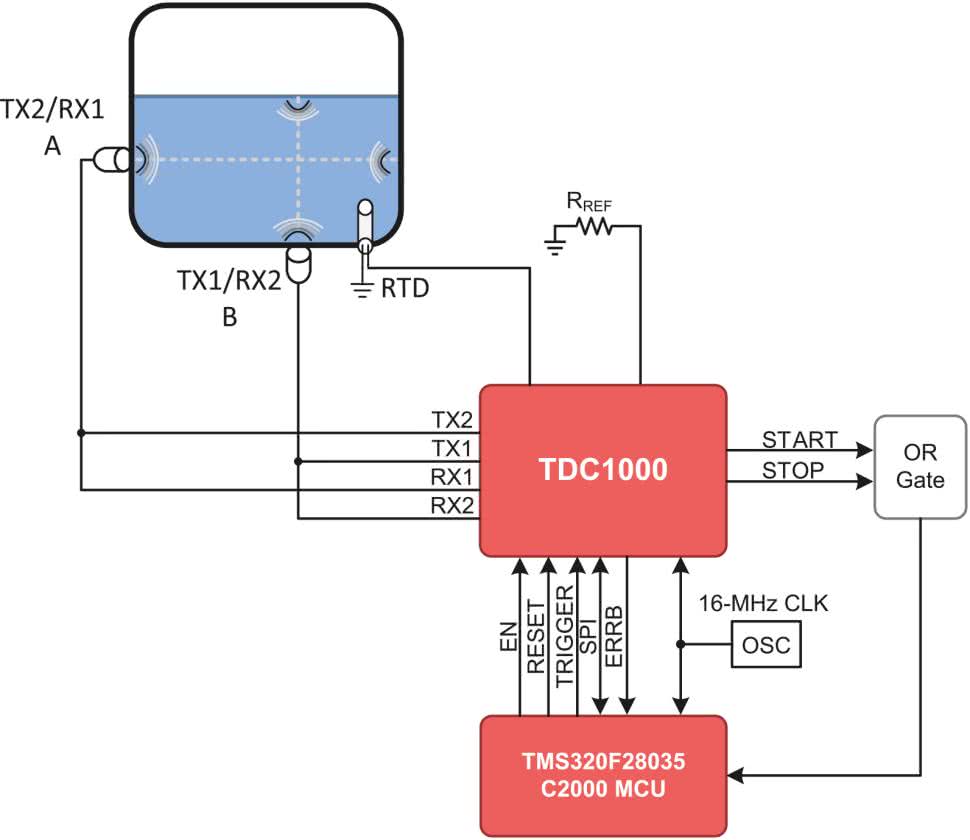
- Tryb Mode 0 jest przeznaczony do pomiarów poziomu cieczy oraz stężenia substancji w znanych roztworach (względnie – do identyfikacji rodzaju tychże roztworów), przy czym ten sam odbiornik wykorzystuje się do nadawania sygnałów oraz – chwilę później – do odbierania ich echa. Po zakończeniu cyklu pomiarowego układ przechodzi w tryb uśpienia (SLEEP). Warto dodać, że nomenklatura zastosowana przez TI do określenia trybów pracy może wydawać się nieco myląca, bowiem oznaczenia linii wejściowych i wyjściowych służących do podłączenia przetworników są ze sobą niejako zamienione – linia RX1 służy do odbioru paczek impulsów wysłanych przez TX2 i odwrotnie (!).
W przypadku pomiaru poziomu cieczy w zbiorniku, przetwornik może być zamontowany w jego dnie – dzięki różnicy impedancji akustycznej, odbicie fali nastąpi po natrafieniu przez ultradźwięki na granicę ośrodków (ciecz-powietrze). Taką konfigurację reprezentuje ustawiony pionowo przetwornik na rysunku 22. Jeżeli natomiast celem pomiaru ma być określenie stężenia substancji w roztworze (czy też jego identyfikacja jako taka) – parametrem niezmiennym powinna być długość drogi przebywanej przez falę, zaś mierzoną niewiadomą – prędkość fali w ośrodku. Do tego celu służy pokazany na rysunku 21 przetwornik skierowany poziomo na przeciwległą ściankę zbiornika;
- W trybie Mode 1 użytkownik może podłączyć do front-endu jedną parę przetworników (odbiornik/nadajnik) lub dwie pary, przy czym numery linii RX/TX są spójne i logiczne (RX1 odbiera impulsy z TX1, zaś RX2 – z TX2);
- W trybie Mode 2 można realizować pomiary prędkości przepływu, w których dwa przetworniki (oznaczmy je literami A i B) są stosowane „krzyżowo”, tzn. sygnał z przetwornika A jest odbierany przez B (pracujący wtedy w roli odbiornika), zaś w kolejnej części procedury przetwornik B nadaje sygnał, którego nasłuchuje element A. W tym przypadku po zakończeniu procedury pomiarowej układ pozostaje w trybie gotowości (READY). Co więcej: użytkownik może użyć funkcji uśredniania, która w rzeczywistości powtarza jedynie procedurę pomiaru TOF w liczbie określonej przez pole bitowe NUM_AVG (natomiast rzeczywiste uśrednienie pomiarów i tak wykonać musi zewnętrzny procesor). W przypadku, gdy bit CH_SWP w rejestrze CONFIG_2 jest ustawiony, układ dokonuje zamiany kanałów pomiarowych w każdym z kolejnych cykli zliczanych w ramach danej procedury pomiarowej.
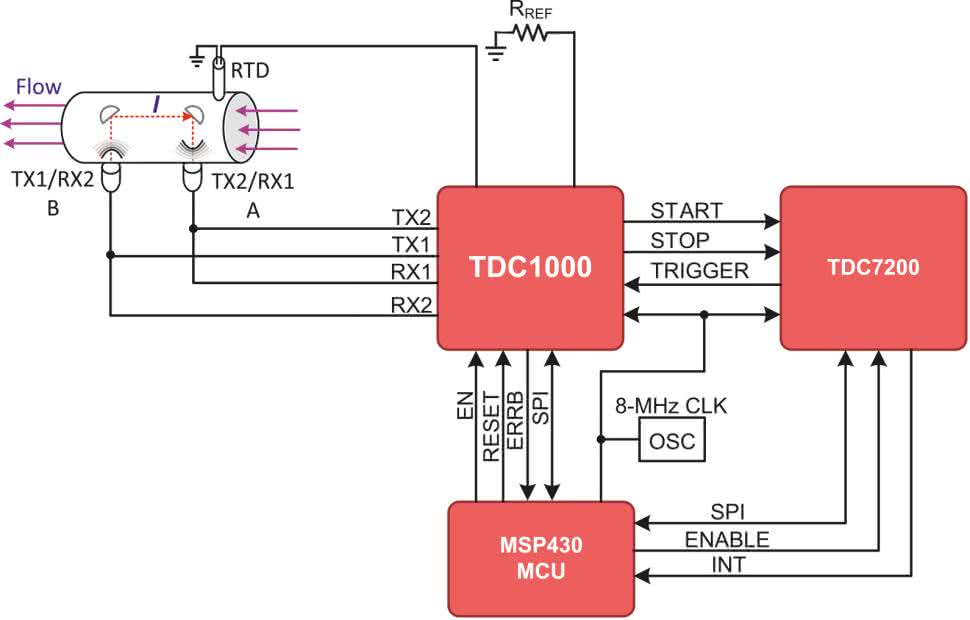
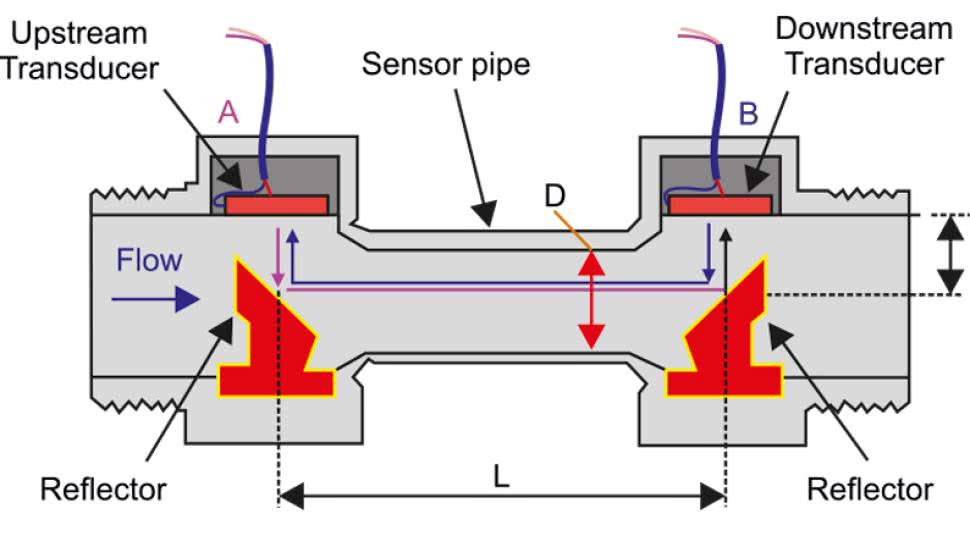
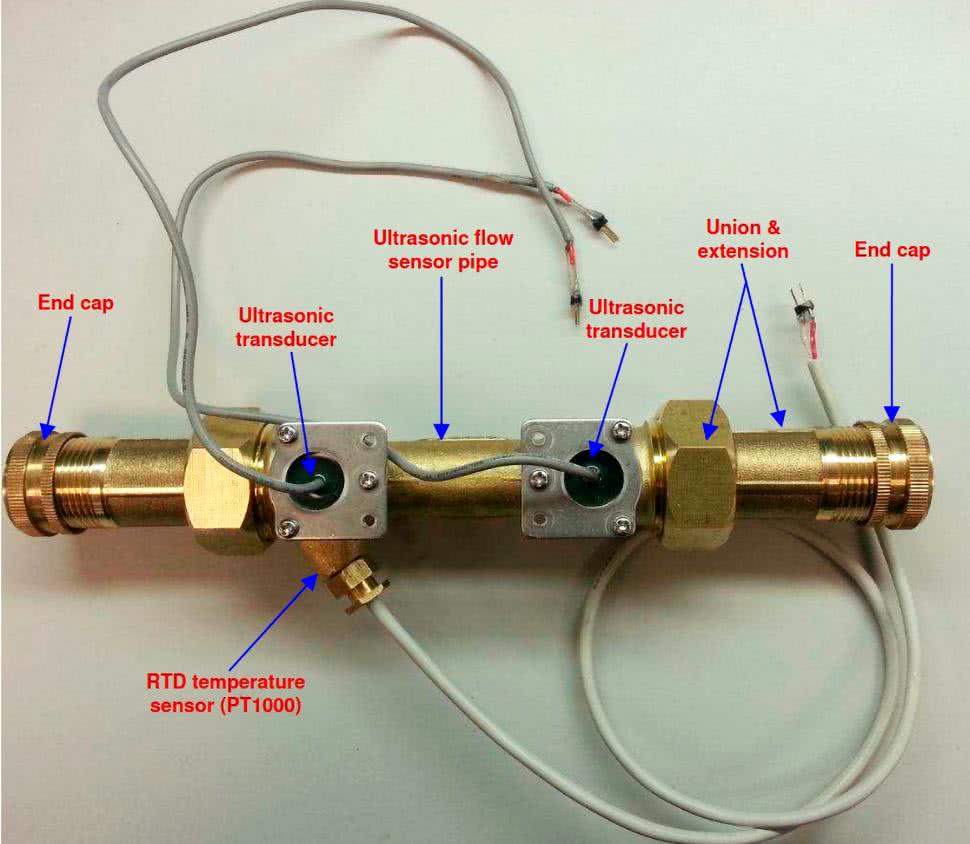
Schemat koncepcyjny pomiaru prędkości przepływu metodą TOF z użyciem front-endu TDC1000 zaprezentowano na rysunku 23, zaś przekrój oraz rzeczywisty widok przykładowego zespołu pomiarowego – odpowiednio – na rysunku 24 i fotografii 5.
Warto dodać, że generator impulsów nadawczych układu TDC1000 oferuje dwie dodatkowe funkcje, pozwalające częściowo stłumić rezonans własny przetwornika nadawczego:
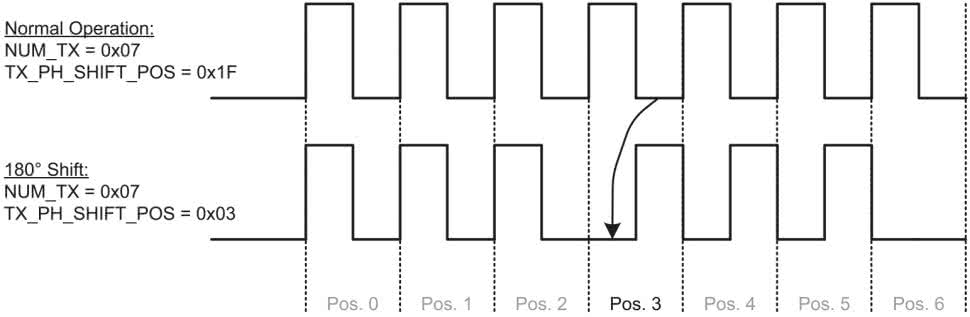
- Przesunięcie fazy – ustawienie pola bitowego TX_PH_SHIFT_POS w rejestrze CONFIG_4 umożliwia wprowadzenie przesunięcia fazy sygnału generowanego na liniach TX1 i/lub TX2 o 180° w ściśle określonym momencie nadawania paczki impulsów (rysunek 25). Według producenta taki zabieg pozwala w niektórych sytuacjach częściowo skrócić czas wyłączania nadajnika. Producent zaleca unikanie ustawienia TX_PH_SHIFT_POS na wartości 0 lub 1 – liczba 31 powoduje natomiast całkowite wyłączenie tej funkcji.
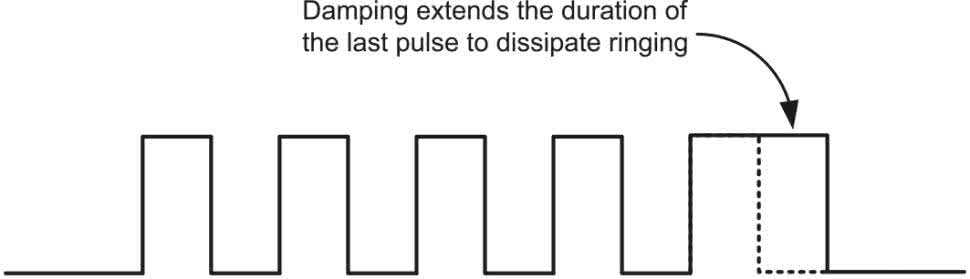
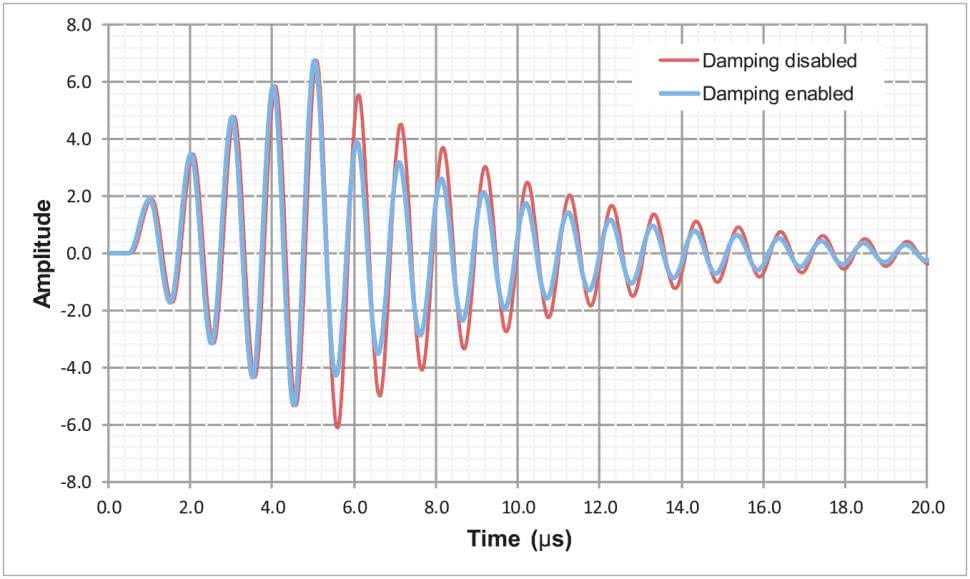
- Tłumienie nadajnika – druga z omawianych funkcji może być włączona za pomocą bitu DAMPING, znajdującego się w rejestrze CONFIG_2. W efekcie ustawienia ww. bitu, nadajnik przedłuży ostatni impuls z paczki nadawczej, co sprawi, że przetwornik – kolokwialnie rzecz ujmując – częściowo „wypadnie z rytmu”, narzuconego przez częstotliwość nadawania, zbliżoną do jego własnej częstotliwości rezonansowej (rysunek 26). Efektem tego pozornie mało znaczącego zabiegu jest natychmiastowy, wyraźny spadek amplitudy drgań gasnących (rysunek 27). Warto dodać, że producent uczciwie przyznaje, iż uruchomienie obu funkcji jednocześnie (przesunięcie fazy i tłumienie nadajnika) może doprowadzić do niewłaściwego zachowania front-endu – podobnie zresztą, jak zastosowanie funkcji damping w przypadku paczek o długości 31 impulsów.
Podsumowanie
Pomiary ultradźwiękowe wiążą się z koniecznością zastosowania szeregu technik układowych, pozwalających na poprawę czułości, rozdzielczości i dokładności pomiarowej także w warunkach niesprzyjających – zwłaszcza przy silnym tłumieniu sygnału echa przez ośrodek i/lub powierzchnię odbijającą wiązkę ultradźwięków. Warto zwrócić uwagę na fakt, że wszystkie opisane sposoby bazują na jednej tylko metodologii – pomiarze czasu przelotu wiązki (TOF) – co doskonale pokazuje, jak szerokie spektrum aplikacji pokrywa umiejętne zastosowanie tak prostej metody w praktyce.
Zaprezentowany w tym odcinku Poradnika Implementacji materiał na temat front-endów ultradźwiękowych marki Texas Instruments stanowi mocną podbudowę teoretyczną pod analizę bardziej zaawansowanych układów, bowiem dobre zrozumienie opisanych w artykule technik pomiarowych oraz funkcji i parametrów front-endów znacząco ułatwi poznanie bardziej zaawansowanych układów AFE z tej kategorii.
inż. Przemysław Musz, EP
[1] To samo zjawisko występuje w przypadku fali nadanej przez obiekt poruszający się względem obserwatora (układu pomiarowego).










