Zaloguj
Zaloguj



Proste aplikacje stabilizatorów i stabilizatory scalone
Na rysunku 1 został pokazany prosty stabilizator napięcia z diodą Zenera i tranzystorem bipolarnym. Zasadniczą wadą takiego rozwiązania jest duża wartość spadku napięcia na tranzystorze (drop out voltage), która może wynosić 1 V i więcej. Na rysunku 2 został pokazany układ stabilizatora, w którym zastosowano tranzystor MOSFET z kanałem N i dzięki temu uzyskano bardzo niską wartość parametru drop out. Jako tranzystor MOSFET można zastosować dowolny tranzystor niskonapięciowy np. IRF9530.

Inną wadą rozwiązania z rysunku 1 jest mała stabilność napięcia wyjściowego. Dla uzyskania lepszej stabilizacji można zastosować inny układ.

Dobrym przykładem jest źródło napięcia odniesienia LM385, którego schemat wewnętrzny został pokazany na rysunku 3. Układ ten stosuje się tak samo jak zwykłą diodę Zenera. Jednak wartość napięcia jest bardzo stabilna i odporna na zmiany temperatury. Jest dostępny w dwóch wersjach - na napięcie 1,2 V oraz 2,5 V.
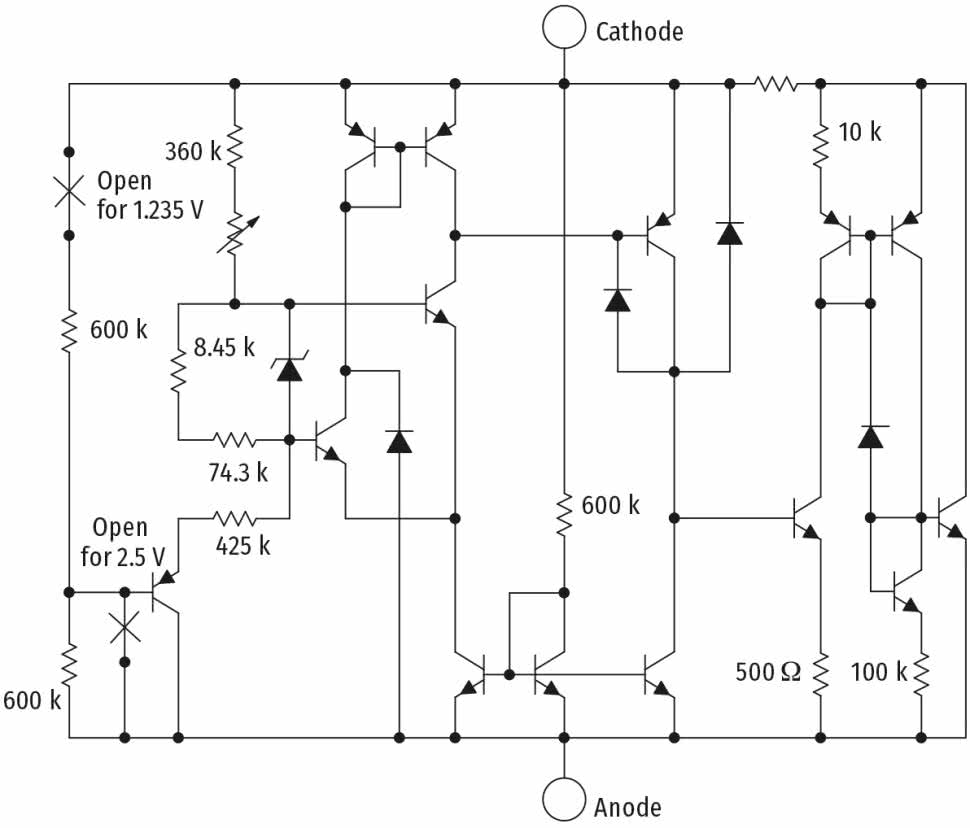
Określone na stałe napięcie wyjściowe zasadniczo ogranicza obszar zastosowań układu LM385. Interesującą alternatywą jest regulowane źródło napięcia odniesienia TL431. Jest to bardzo popularny i uniwersalny układ, który może pełnić funkcję zarówno źródła napięcia odniesienia, jak i wzmacniacza błędu.
Wartość napięcia referencyjnego wynosi 2,5 V, ale wyprowadzone wejście wzmacniacza błędu pozwala na łatwe konfigurowanie napięcia wyjściowego. Kolejną jego zaletą jest wysoki prąd przewodzenia - wynosi aż do 100 mA.


Przykładową aplikację układu TL431 pokazano na rysunku 5. Napięcie wyjściowe określane jest wzorem:

gdzie Uref = 2,5 V.
Dla napięcia wyjściowego 5 V można zastosować następujące elementy:
T: BD135, R: 100 Ω, R1: 10 kΩ, R2: 10 kΩ, C: 1 nF.
Stabilizatory scalone serii 78XX (79XX)
Jedne z najpopularniejszych stabilizatorów scalonych to seria 78XX i 79XX. Dostępne są w wersji o maksymalnym prądzie 1,5 A, 0,5 A (78MXX, 79MXX) oraz w wersji 0,1 A (78LXX, 79LXX). Układy zaczynające się od 78 to stabilizatory napięcia dodatniego, natomiast 79 to stabilizatory napięcia ujemnego.
Znaki XX w symbolu układu scalonego oznaczają napięcie wyjściowe. Schemat wewnętrzny został pokazany na rysunku 6. Układy te dostępne są w niemal wszystkich typach obudów zarówno przewlekanych, jak i SMD.

Stabilizatory scalone LM1117
Zasadniczą wadą układów 78XX/79XX jest duży spadek napięcia drop out. Dlatego dużą popularność zyskał stabilizator low drop out (LDO) typu LM1117.
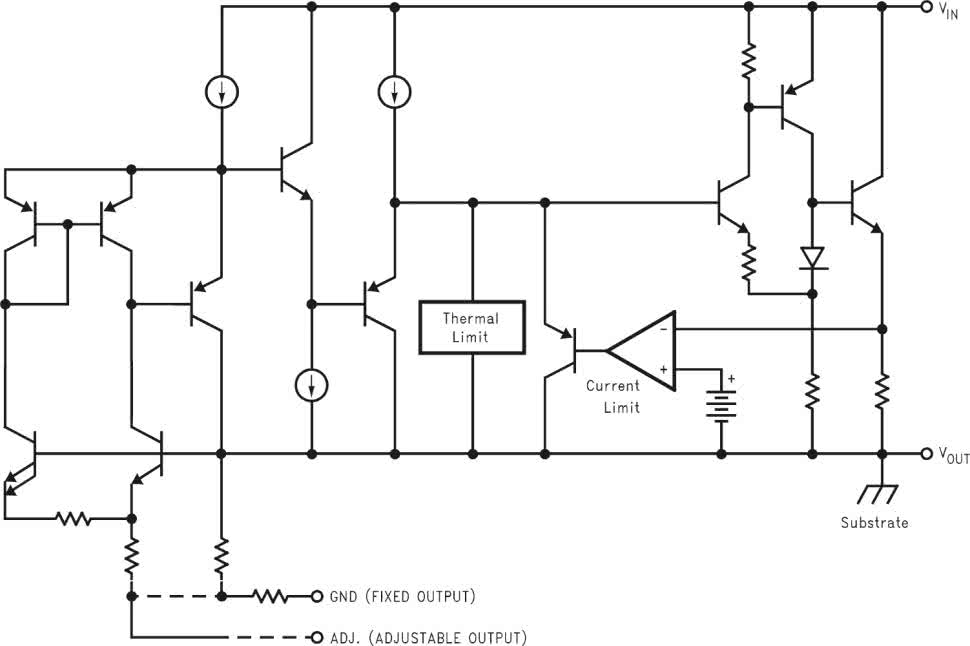
Jego schemat wewnętrzny został pokazany na rysunku 7, a podstawową aplikację układu pokazuje rysunek 8.
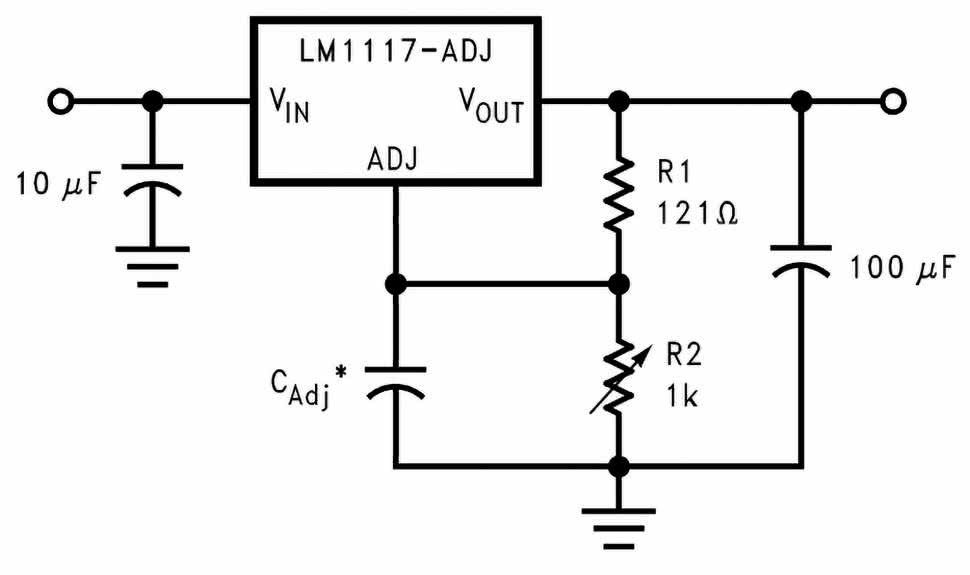
Napięcie wyjściowe jest obliczane ze wzoru:

Układ dostępny jest w wersjach o napięciu wyjściowym 1,8 V, 2,5 V 3,3 V, 5 V, oraz w wersji regulowanej i również występuje w wielu typach obudów.
Elementy indukcyjne stosowane w zasilaczach
Pole magnetyczne powstaje pod wpływem przepływu prądu elektrycznego przez przewodnik. Miarą pola magnetycznego jest indukcja magnetyczna, której jednostką jest tesla [T]. Dla cewki wartość indukcji magnetycznej określa wzór:

gdzie:
- B - indukcja magnetyczna [T],
- µ - przenikalność magnetyczna,
- I - natężenie prądu elektrycznego,
- Z - liczba zwojów,
- l - długość linii pola magetycznego,
- k - współczynnik wynikający z geometrii cewki.
W opisie parametrów pola magnetycznego używa się jeszcze następujących wielkości:
- natężenie pola magnetycznego:

- strumień magnetyczny:
![]()
Przenikalność magnetyczna µ zależy od materiału, w którym powstaje pole magnetyczne. Dla powietrza wartość ta jest bardzo niska i wynosi:

Rozkład pola magnetycznego w cewce indukcyjnej pokazuje rysunek 9.

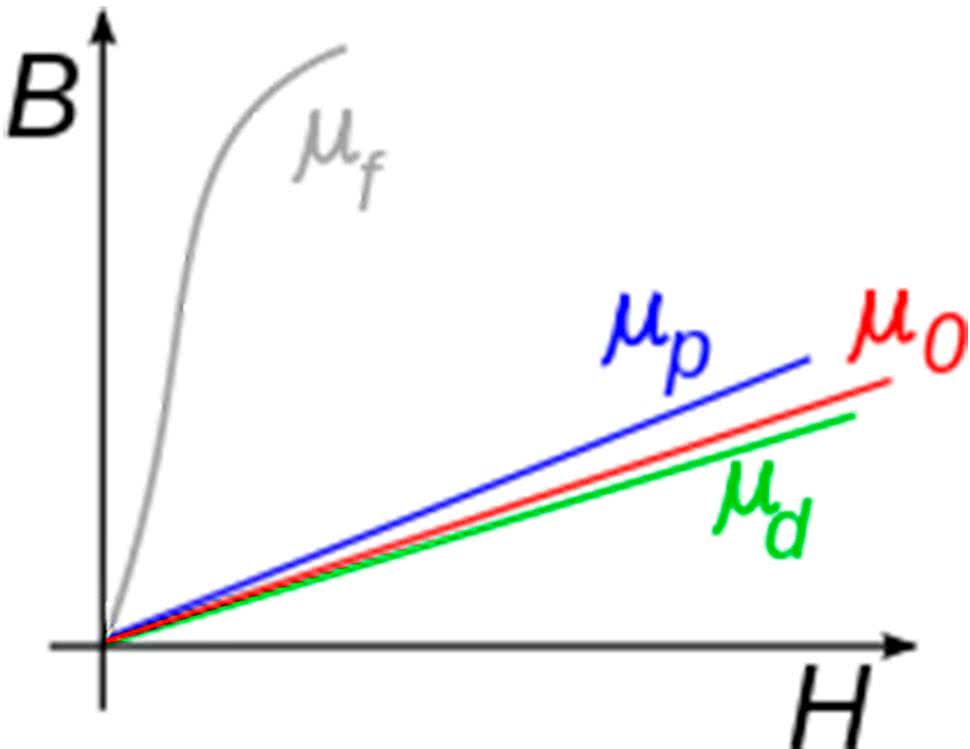
Jeśli chcemy wytworzyć duży strumień magnetyczny w cewce, to należy zastosować rdzeń z materiału o dużej przenikalności magnetycznej. Największą przenikalność magnetyczną mają tzw. ferromagnetyki. Jednak wadą tych materiałów jest ograniczona wartość maksymalnej indukcji pola magnetycznego, które wewnątrz nich może powstać. Innymi materiałami stosowanymi jako rdzenie są diamagnetyki, których przenikalność jest mniejsza od przenikalności magnetycznej próżni, oraz paramagnetyki, których przenikalność magnetyczna jest nieznacznie większa od przenikalności magnetycznej próżni - rysunek 10.
Kolejną właściwością pola magnetycznego jest wytwarzanie siły elektromotorycznej (napięcia) pod wpływem zmian strumienia magnetycznego:

gdzie:
- Ψ - strumień magnetyczny,
- Z - liczba zwojów,
- t - czas.
Cewka indukcyjna
Podstawowym elementem indukcyjnym stosowanym w elektronice jest cewka indukcyjna (rysunek 11).

Jej charakterystycznym parametrem jest indukcyjność wyrażana w Henrach [H], która jest definiowana w następujący sposób:
Możemy tę definicję przekształcić w następujący sposób, uzyskując podstawową właściwość cewki indukcyjnej:
Wartość indukcyjności wynikająca z budowy cewki jest określana wzorem:
![]()
Jeśli przez cewkę popłynie prąd, pojawia się na jej zaciskach napięcie, które nosi nazwę siły przeciwelektromotorycznej. Jednak aby możliwy był przepływ prądu przez cewkę, napięcie na jej zaciskach nie może być mniejsze od siły indukowanej poprzez przepływ prądu. Z tego wynika, że po przyłożeniu stałego napięcia na zaciski cewki uzyskujemy liniowy przepływ prądu:

Cewki indukcyjne stosowane w układach mocy nazywane są dławikami. W praktyce rdzenie stosowane w dławikach opisuje się parametrem o nazwie AL, na podstawie którego można w prosty sposób wyznaczyć wartość indukcyjności:
![]()
Na podstawie tego wzoru i poprzednich można wyznaczyć wartość indukcji pola magnetycznego:

Wzór ten jest bardzo przydatny przy projektowaniu dławików mocy. Jedną z najważniejszych czynności jest zadbanie o to, aby nie przekroczyć maksymalnej wartości indukcji pola magnetycznego dla materiału rdzenia. Z powyższych wzorów wynika, że aby zmniejszyć wartość indukcji w rdzeniu, należy zmniejszyć jego przenikalność magnetyczną (zapewnia to możliwość pracy przy większym natężeniu prądu, jednak zwiększa liczbę zwojów). Z tego powodu w dławikach mocy o rdzeniach o dużej przenikalności magnetycznej stosuje się szczelinę powietrzną.

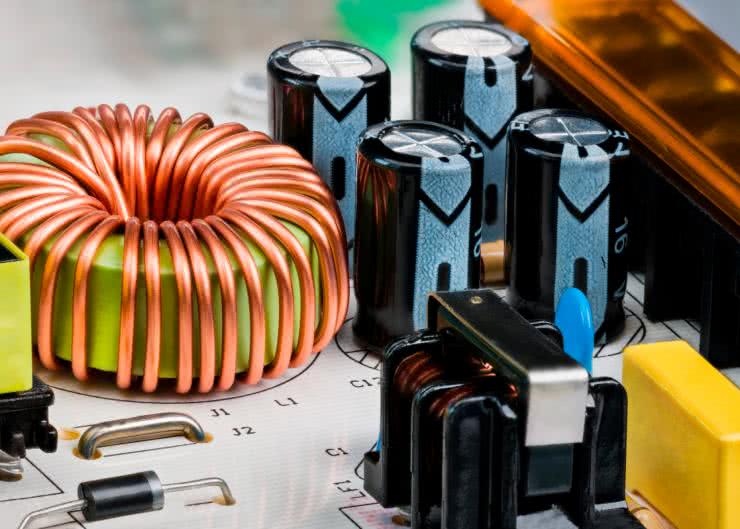
Rdzenie w dławikach mogą mieć różne kształty. Najczęściej stosowane są rdzenie kubkowe, osiowe, pierścieniowe lub EE - fotografia 1. Dławiki pionowe lub osiowe stosuje się dla stosunkowo małych indukcyjności. W zasilaczach impulsowych dużej mocy najczęściej stosuje się dławiki pierścieniowe z rdzeniem proszkowym. Materiał ten ma dużą maksymalną indukcję i bardzo dobrze nadaje się do tego celu. Ponadto ma niewielką przenikalność magnetyczną dzięki czemu można uzyskać dużą wartość natężenia pola magnetycznego bez konieczności stosowania szczeliny.
Tomasz Krogulski
krogul70@gmail.com