Zaloguj
Zaloguj




Odbieramy
Odbieranie danych jest procesem nieco trudniejszym od nadawania. Nie mamy pełnej kontroli nad sytuacją, musimy bardziej dostosować się do nadawcy. Przyjrzyjmy się jeszcze raz ramce danych (rysunek 1).
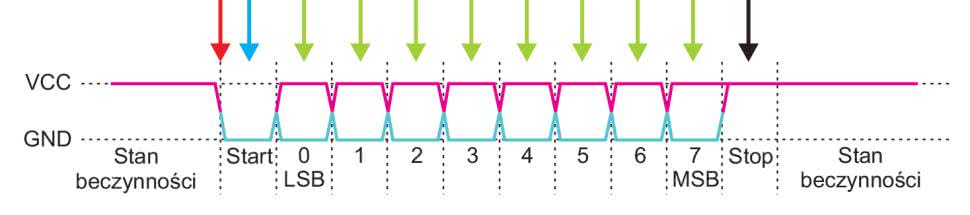
Dodatkowo znalazły się nad nią strzałki, określające momenty, w których musi zareagować nasz odbiornik.
W stanie bezczynności na linii panuje jedynka logiczna. Nasz odbiornik cały czas oczekuje, aż stan zmieni się na zero, co oznacza pojawienie się bitu startu i początek nowej ramki. Wydarzenie to zaznaczone jest czerwoną strzałką. Bit startu pozwala nam zsynchronizować nasz odbiór z nadajnikiem. W tym monecie musimy uruchomić nasz własny zegar, który powie nam, kiedy na linii pojawią się kolejne bity. Chcemy jednak odczytywać stan linii nie w momentach, gdy następuje zmiana, ale gdy jej stan jest stabilny. Dlatego kolejne odczyty będziemy wykonywać nie w momencie gdy licznik się przepełni, ale gdy doliczy do połowy. Pierwszy odczyt (niebieska strzałka) trafi więc w bit startu, a dopiero kolejne osiem (zaznaczone na zielono) pozwoli odebrać dane. Cały cykl odbioru kończymy na bicie stopu, zaznaczonym czarną strzałką. W tym momencie dane zostały odebrane, a odbiornik znowu rozpoczyna nasłuch w celu wykrycia następnego bitu startu.
Podobnie jak w nadajniku, tu także skorzystamy z maszyny stanu. Tym razem wystarczą nam cztery stany: WAIT, START, DATA i STOP. Na rysunku 2 pokazano graf przejść maszyny stanów.
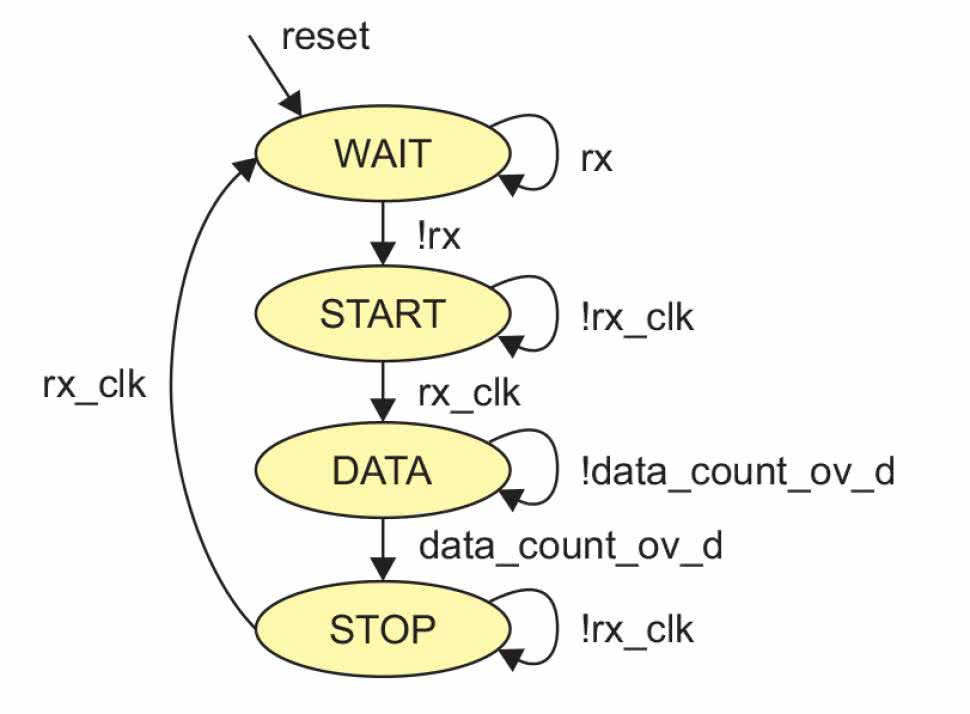
Bezpośrednio wynikają one ze zdarzeń zaznaczonych na rysunku 1. Po resecie moduł znajdzie się w stanie WAIT, gdzie oczekuje dopóty, dopóki stan na wejściu rx nie zmieni się na niski. Spowoduje to przejście do stanu START, gdzie oczekuje na pierwszy sygnał rx_clk, który następuje w połowie bitu startu. Wtedy następuje przejście do stanu DATA, w którym odbiornik znajduje się aż do odebrania 8 bitów transmitowanych w pojedynczej ramce. Następnie poprzez stan STOP wraca do oczekiwania na nową transmisję w stanie WAIT. Jej implementację pokazuje listing 1.
29 always_ff @(posedge bus.clk or negedge bus.rst)
30 if (!bus.rst)
31 s <= WAIT;
32 else
33 case (s)
34 WAIT: s <= rx ? WAIT : START;
35 START: s <= rx_clk ? DATA : START;
36 DATA: s <= data_count_ov_d ? STOP : DATA;
37 STOP: s <= rx_clk ? WAIT : STOP;
38 default: s <= WAIT;
39 endcase
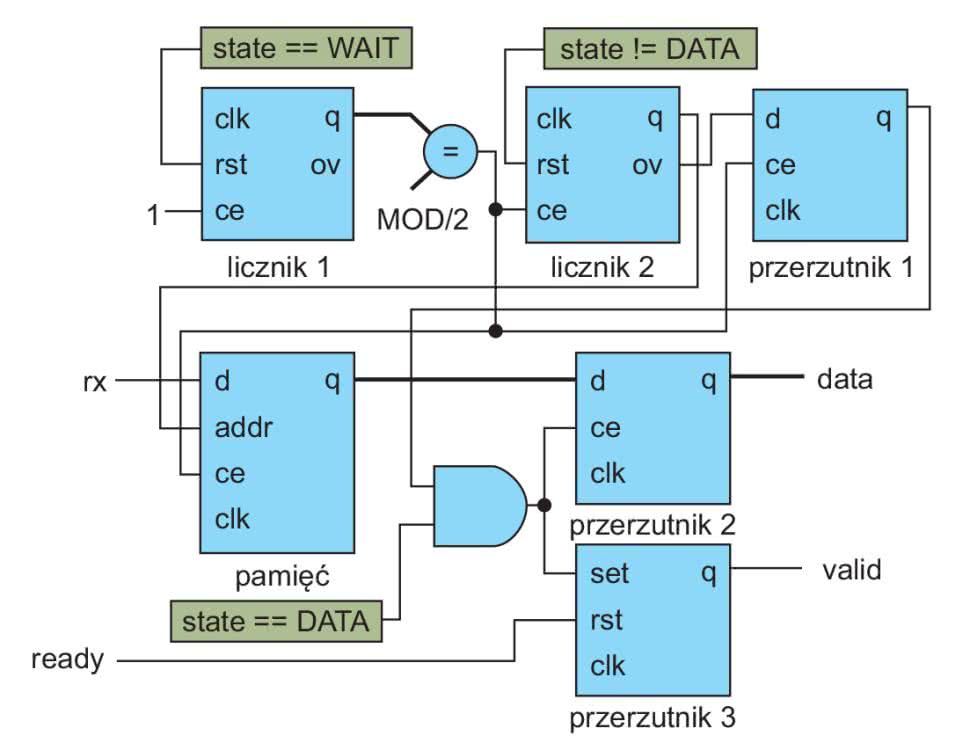
Na rysunku 3 pokazano poglądowy schemat logiki odbiornika, natomiast listing 2 prezentuje jej implementację.
41 assign ctx_rst = (s == WAIT);
43 counter #(.N(MOD)) crx (
43 .clk(bus.clk),
44 .rst(!ctx_rst),
45 .ce(1’b1),
46 .q(ctx_q),
47 .ov());
48 assign rx_clk = (ctx_q == MOD/2);
49
50 assign data_count_rst = (s != uartPkg::DATA);
51 counter #(.N(8)) data_count (
52 .clk(bus.clk),
53 .rst(!data_count_rst),
54 .ce(rx_clk),
55 .q(i),
56 .ov(data_count_ov));
57
58 always_ff @(posedge bus.clk)
59 if (rx_clk)
60 data_count_ov_d <= data_count_ov;
61
62 always_ff @(posedge bus.clk)
63 if (rx_clk)
64 rxb[i] <= rx;
65
66 always_ff @(posedge bus.clk or negedge bus.rst)
67 if (!bus.rst)
68 bus.valid <= 1’b0;
69 else if (data_count_ov_d && s == DATA)
70 bus.valid <= 1’b1;
71 else if (bus.ready)
72 bus.valid <= 1’b0;
73
74 always_ff @(posedge bus.clk)
75 if (data_count_ov_d && s == DATA)
76 bus.data <= rxb;
Jego zachowanie zależy od aktualnego stanu maszyny stanów. Licznik1 służy do odmierzania czasu trwania pojedynczego symbolu. Startuje on, gdy moduł wyjdzie ze stanu WAIT. Jego implementacja znajduje się w liniach 41...48. Tym razem jednak sygnał CE jest aktywny, gdy doliczy do połowy, a nie w momencie przepełnienia. Zostało to zrealizowane za pomocą polecenia assign w linii 48. Licznik2 (linie 50...56) zlicza liczbę odebranych bitów. Pracuje, tylko gdy odbiornik jest w stanie DATA. Na podstawie jego wartości wybierana jest pozycja w ośmiobitowej „pamięci”, pod którą zostanie zapisana kolejna wartość z wejścia rx. Jej implementacja zajmuje trzy linie 62...64. Na końcu Przerzutnik2 (linie 74...76) zatrzaskuje odebraną wartość, dzięki czemu będzie ona dostępna cały czas, aż do odebrania kolejnej. Przerzutnik3 (linie 66...72) obsługuje naszą magistralę. Gdy pojawi się nowa wartość, sygnał valid zostanie ustawiony na 1, w którym zostanie, aż do pojawienia się sygnału na wejściu ready. W kodzie, za pomocą kolejności warunków w wyrażeniu if/else, zadbaliśmy o to, żeby ustawienie miało wyższy priorytet niż kasowanie. Wtedy nawet jeżeli ready będzie cały czas aktywne, valid i tak „zapaliło” się na jeden cykl zegara. Natomiast w żaden sposób nie sprawdzamy, czy dana została przez kogoś odczytana. Jeżeli pojawi się kolejna, stara wartość zostanie po prostu nadpisana.
Aby sprawdzić działanie modułu, zastosujemy testbench, którego fragment pokazuje listing 3.
28 initial begin
29 bus_rx.ready <= 1’b1;
30 bus_tx.valid <= 1’b1;
31 bus_tx.data <= 8’hab;
32 end
33
34 uart_tx uart_tx(
35 .bus(bus_tx),
36 .tx(rtx));
37
38 uart_rx dut(
39 .rx(rtx),
40 .bus(bus_rx));
Do wygenerowania sygnału testowego użyty został nadajnik opisany w poprzedniej części. Jego wyjście tx zostało podłączone do wejścia rx odbiornika. Aby ją uruchomić, w programie ModelSim wywołujemy polecenie:
do uart_rx_sim.do

Uzyskany wynik pokazano na rysunku 4. Na samej górze widzimy sygnał zegarowy clk, lecz jest on na tyle szybki, że w ustawionym przybliżeniu jego zmiany zlewają się ze sobą i widzimy„ciągły prostokąt”. Pod nim widzimy sygnał resetu. Niżej widzimy fragment magistrali wejściowej nadajnika. Jako dana wpisana jest liczba 0xAB, natomiast sygnał valid jest ciągle ustawiony na 1. Powoduje to, że nadajnik gdy tylko skończy jedną transakcję od razu rozpocznie następną.
Sygnał wejściowy odbiornika pokazany jest w linii rtx. Najciekawszy jest sygnał rxb, w którym widzimy kolejne odebrane bity. Na początku jego stan jest nieustalony, co symbolizuje kolor czerwony oraz znaki X. Przy okazji warto zobaczyć, że raz mamy mały znak x, a raz duży X. x oznacza, że wszystkie 4 bity, które opisuje, są nieustalone, a X – że część z nich ma już przypisaną wartość. Na samym końcu widzimy, że poprawnie została odebrana wartość 0xAB.
Trzy kolejne sygnały to informacje o wnętrzu odbiornika: s to aktualny stan odbiornika, i – numer odbieranego bitu, a rx_clk – zegara odbiornika liczący czas trwania symbolu. Na samym końcu widzimy magistralę wyjściową: jej sygnał data i valid.
Echo
Aby przetestować działanie całości, uruchomimy układ działający podobnie jak „echo”, ale żeby sprawdzić, czy poprawnie przetwarza dane pomiędzy odbiornikiem a nadajnikiem dodamy blok zwiększający odebraną wartość o jeden. Układ pokazano na rysunku 5.
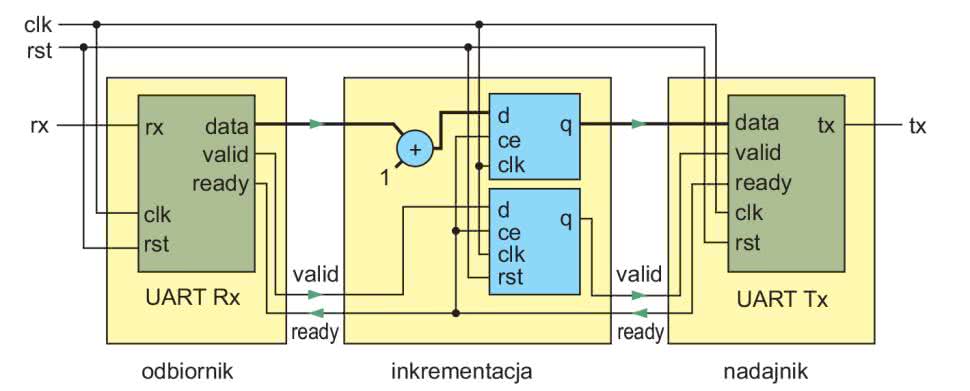
Pierwszym elementem jest odbiornik. Jego wyjście przepływa przez blok realizujący inkrementację. Warto zwrócić uwagę, że sygnał valid ma taką samą latencję jak data. Ostatnim elementem jest opracowany w poprzedniej części nadajnik. Jego implementację znajdziemy na listingu 4.
10 module uart_inc #(
11 parameter F = 8000000
12 ) (
13 input wire clk,
14 input wire rst,
15 input wire rx,
16 output logic tx
17 );
18 StreamBus #(.N(8)) bus_rx (.clk(clk), .rst(rst));
19 StreamBus #(.N(8)) bus_tx (.clk(clk), .rst(rst));
20
21 uart_rx #(.F(F), .BAUD(115200)) urx (
22 .rx(rx),
23 .bus(bus_rx));
24
25 inc increment (
26 .bus_in(bus_rx),
27 .bus_out(bus_tx));
28
29 uart_tx #(.F(F), .BAUD(115200)) utx (
30 .bus(bus_tx),
31 .tx(tx));
32
33 endmodule
Nasz główny model nosi nazwę uart_inc. Ma on trzy wejścia: zegar clk, reset rst i rx oraz jedno wyjście: tx. W liniach 18 i 19 tworzymy dwie magistrale. Pierwsza bus_rx posłuży do połączenia odbiornika z modułem inkrementującym, a druga bus_tx posłuży do przekazania uzyskanego wyniku do nadajnika. Następnie znajdują się instancje wykorzystanych pod modułów: odbiornik (linie 21...23), inkrementacji (25...27) i nadajnik (29...31).
Moduł można przetestować za pomocą testbenchu, który znajduje się w pliku 06_UART/uart_inc_tb.sv. Aby wygenerować i sprawdzić sygnały testowe zostały w nim dodane dodatkowe moduły Rx i Tx. Można go uruchomić za pomocą polecenia:
do uart_inc_sim.do
Jej wynik możemy zobaczyć na rysunku 6.

W trzeciej linii widzimy dane wejściowe. W zapisie binarnym jest to liczba 10101011, co dziesiętnie daje liczbę 171. W ostatniej linii widzimy dane, które wychodzą z bloku uart_inc. Uzyskana wartość to 10101100 binarnie, czyli 172. Oznacza to, że wynik symulacji jest poprawny.
Teraz możemy przejść do ostatniej części, czyli uruchomienia projektu w sprzęcie. W tym celu przygotowany został projekt 06_UART/06_uart_inc.qpf. Możemy go otworzyć, zbudować i zaprogramować płytkę. Do przetestowania użyjemy znanego nam już programu RealTerm. Najpierw w zakładce Port wybieramy numer portu i ustawiamy prędkość na 115200. Następnie przechodzimy do zakładki Send, co zostało zaprezentowane na rysunku 7.
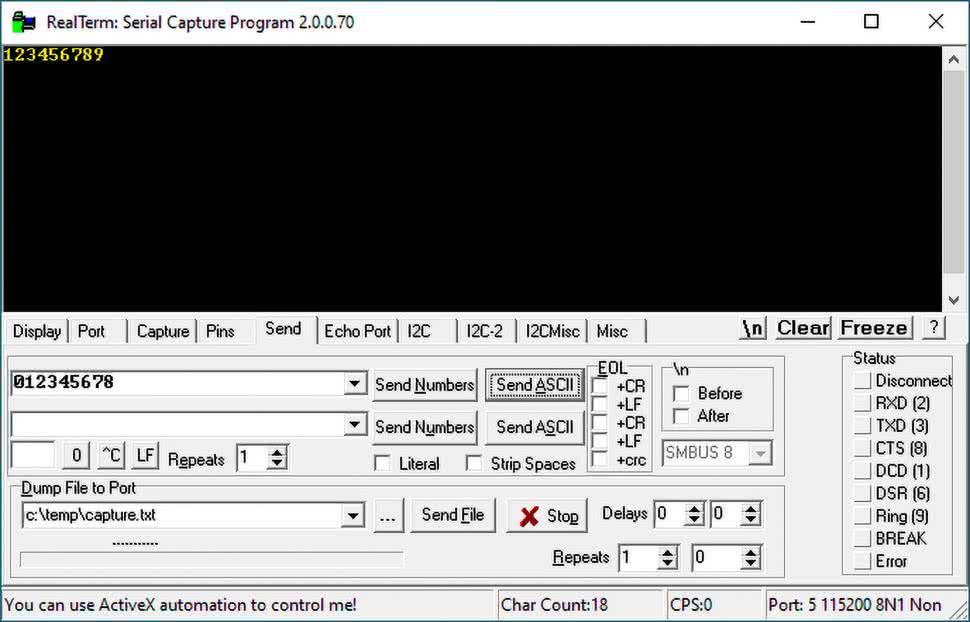
W pole tekstowe możemy wpisać kilka znaków ASCII (u mnie 012345678). Po kliknięciu przycisku Send ASCII zostaną one wysłane przez port szeregowy. W konsoli zobaczymy wyniki, czyli ciąg znaków o kodach o 1 większych.
W przedstawionym przypadku jest to 123456789.
Sygnał PWM
Kolejnym eksperymentem jest generator sygnału PWM. Skrót ten pochodzi od pulse-width modulation, czyli modulacja szerokości impulsu. Jest to sygnał prostokątny o zadanym wypełnieniu.
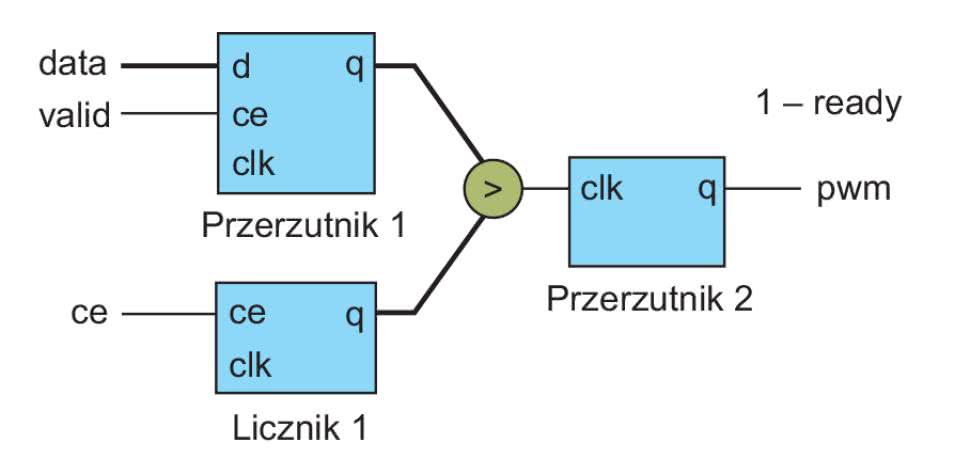
Uproszczony schemat pokazano na rysunku 8. W przerzutniku 1 zapamiętane jest zadane wypełnienie. Jest ono zatrzaskiwane w momencie, gdy sygnał valid jest ustawiony. Zapis jest zawsze możliwy, dlatego sygnał ready został na stałe ustawiony na 1. Licznik 1 w kółko zlicza od 0 do zadanej wartości maksymalnej. Sygnał CE pozwala na regulację częstotliwości generowanego przebiegu. Sygnał wyjściowy jest obliczany poprzez porównanie zadanego wypełnienia z obecną wartością licznika. Dopóki wartość licznika jest mniejsza niż wartość zadana, dopóty na wyjściu panuje stan wysoki. Natomiast od momentu, gdy się zrównają, aż do przepełnienia licznika wyjście znajduje się w stanie niskim.
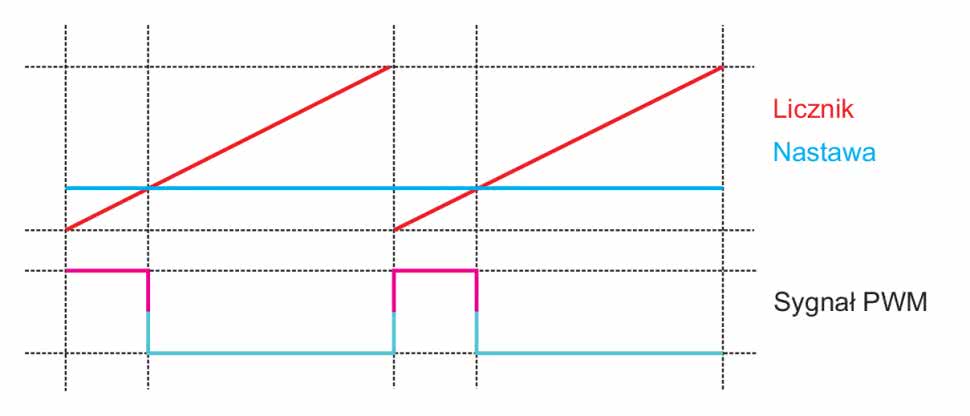
Sytuacja została pokazana na przebiegu czasowym z rysunku 9. Górny wykres pokazuje zadane wypełnienie (kolor niebieski) oraz zmieniający się stan licznika (czerwony). Dolny wykres pokazuje sygnał wyjściowy. Widzimy, że gdy stan licznika jest niższy niż wartość zadana, na wyjściu panuje stan wysoki. W chwili przecięcia następuje zmiana i na wyjściu mamy stan niski. Wypełnienie jest więc równe stosunkowi nastawy do maksymalnej wartości, która może zostać osiągnięta przez licznik.
Przejdźmy teraz do implementacji, którą znajdziemy na listingu 5 (oraz w pliku 07_PWM/pwm.sv).
11 module pwm #(
12 parameter MAX = 255,
13 parameter MAX_LOG = $clog2(MAX)
14 ) (
15 StreamBus.Slave bus,
16 input wire ce,
17 output logic pwm
18 );
19 logic [MAX_LOG-1:0] count;
20 logic [MAX_LOG-1:0] value;
21
22 assign bus.ready = 1’b1;
23
24 counter #(.N(MAX)) ctx (
25 .clk(bus.clk),
26 .rst(bus.rst),
27 .ce(ce),
28 .q(count),
29 .ov());
30
31 always_ff @(posedge bus.clk or negedge bus.rst)
32 if (!bus.rst)
33 value <= ‘0;
34 else if (bus.valid)
35 value <= bus.data;
36
37 always_ff @(posedge bus.clk)
38 pwm <= (count < value);
39
40 endmodule
Parametr MAX określa wartość, do której będzie odliczał licznik, więc równocześnie także wartość nastawy oznaczającej wypełnienie 100%. Sam moduł wystawia znany nam interface StreamBus dzięki czemu będziemy mogli go podłączyć bezpośrednio do wyjścia odbiornika portu szeregowego. Poza tym dostępne jest jeszcze wejście ce oraz wyjście pwm z generowanym przebiegiem. W liniach 24...29 znajduje się instancja licznika. Natomiast w liniach od 31...35 znajduje się przerzutnik, w którym zatrzaskiwana jest nastawa generatora. Samo tworzenie przebiegu ma miejsce w liniach 37 i 38.
Fragment testbench dla modułu znajduje się na listingu 6 (a całość w pliku 07_PWM/pwm_tb.sv).
26 initial begin
27 bus.valid <= 1’b1;
28 bus.data <= 4’d0;
29 for (int i = 1; i <= 10; i++)
30 #5us bus.data <= i;
31 #5us $stop;
32 end
33
34 pwm #(.MAX(10)) dut (
35 .bus(bus),
36 .ce(1’b1),
37 .pwm());
W liniach od 34...37 znajduje się instancja generatora PWM. Wartość MAX została ustalona na 10, co oznacza, że wpisanie 0 równa się 0%, a wpisanie 10 odpowiada wypełnieniu 100%. W liniach 26...32 następuje generowanie wymuszenia.
Sygnałowi valid na stałe została przypisana wartość 1. Nie jest to problemem, ponieważ na wejściu data cały czas utrzymywana jest zadana wartość. Na początku jest ona równa zero, a następnie co pięć mikrosekund jest inkrementowana. Gdy osiągnie maksymalną wartość, czyli 10, nastąpi odczekanie kolejnych pięciu mikrosekund i symulacja zostanie zakończona.
Aby zobaczyć wynik symulacji w programie ModelSim, uruchamiamy skrypt poleceniem:
do ./pwm_sim.do
Wyniki symulacji są pokazane na rysunku 10. W pierwszych trzech liniach widzimy sygnały zegara (clk), resetu (rst) oraz valid. W dwóch kolejnych wierszach mamy wartość data z magistrali oraz opóźnioną o jeden takt zatrzaśniętą wartość zadaną value. Przedostatni wiersz zawiera aktualny stan licznika (count), jednak na załączonym powiększeniu nie da się go odczytać (zachęcam jednak do uruchomienia symulacji i przyglądnięcia mu się na ekranie komputera). Na samym końcu widzimy wyjściowy sygnał pwm. Jak możemy zauważyć, że na samym początku dla wypełnienia 0 jest on ciągle w stanie niskim, następnie wypełnienie rośnie, aby dla wartości 10 być ciągle w stanie wysokim.

Aby przetestować działanie modułu PWM, połączymy go z odbiornikiem portu szeregowego zgodnie z rysunkiem 11.
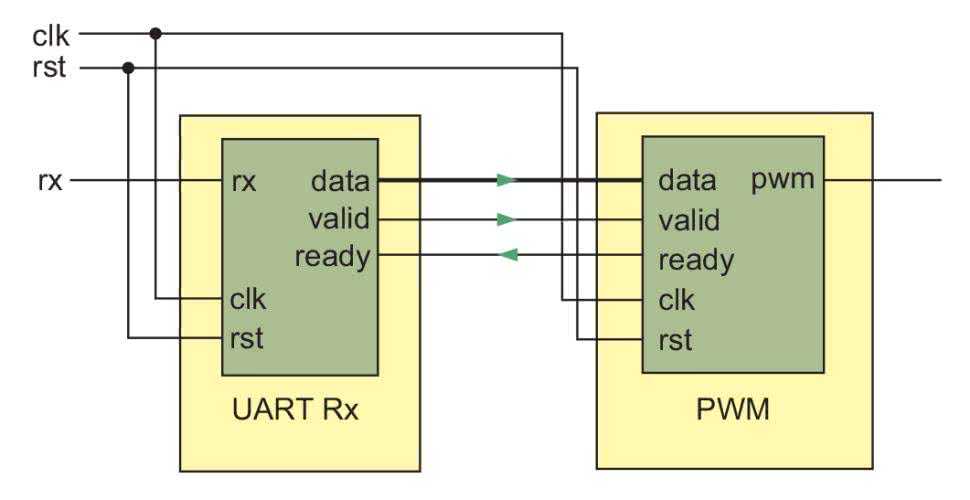
Dzięki temu będziemy mogli za pomocą portu szeregowego sterować jasnością diod LED. Implementacja tego projektu znajduje się na listingu 7.
10 module pwm_uart #(
11 parameter F = 8000000
12 ) (
13 input wire clk,
14 input wire rst,
15 input wire rx,
16 output logic [7:0]led
17 );
18 StreamBus #(.N(8)) bus (.clk(clk), .rst(rst));
19 logic pwm_out;
20
21 uart_rx #(.F(F), .BAUD(115200)) urx (
22 .rx(rx),
23 .bus(bus));
24
25 pwm #(.MAX(255)) dut(
26 .bus(bus),
27 .ce(1’b1),
28 .pwm(pwm_out));
29
30 genvar i;
31 generate
32 for (i = 0; i < $bits(led); i++) begin : LED_PWM
33 always_ff @(posedge bus.clk)
34 led[i] <= pwm_out;
35 end
36 endgenerate
37
38 endmodule
Nasz główny moduł nosi nazwę pwm_uart. W liniach 21...23 znajduje się instancja odbiornika, a dalej w wierszach 25...28 moduł generatora sygnału PWM. Maksymalne wypełnienie jest reprezentowane jako 255. Na końcu w bloku generate zostało stworzone osiem przerzutników, z których każdy będzie sterował jedną z diod świecących. Warto zwrócić uwagę, że obecna tu instrukcja for nie opisuje typowej pętli. Intuicyjnie możemy ją potraktować jako ośmiokrotne wklejenie jej zawartości. Kod ten nie opisuje kolejnych iteracji, ale 8 niezależnych, działających równolegle przerzutników D.
Działanie projektu możemy sprawdzić w symulacji. W programie ModelSim uruchamiamy skrypt:
do ./pwm_uart_sim.do
Wyniki powinny być podobne do tych z rysunku 12.

W 3 wierszu widzimy kolejne wartości wysyłane przez port szeregowy. Na początku zaczynamy od 0, a następnie zwiększając co 5, dochodzimy do maksimum, czyli 255. W czwartym rzędzie widoczna jest linia portu szeregowego, a w piątym sygnał sterujący jedną z diod LED.
Rozpoczyna się on od ciągłego stanu niskiego. Widzimy, że ulega zmianom po kolejnych zakończonych transmisjach. Na końcu, po odebraniu wartości 255, otrzymujemy ciągły stan wysoki.
Ostatnim krokiem jest zbudowanie i uruchomienie projektu w sprzęcie. W tym celu otwieramy projekt 07_PWM/07_pwm.qpf. Po kompilacji i zaprogramowaniu płytki wracamy do programu RealTerm. Tym razem do przesyłania danych użyjemy przycisku Send Numbers (wyślij liczby) pokazany na rysunku 13.
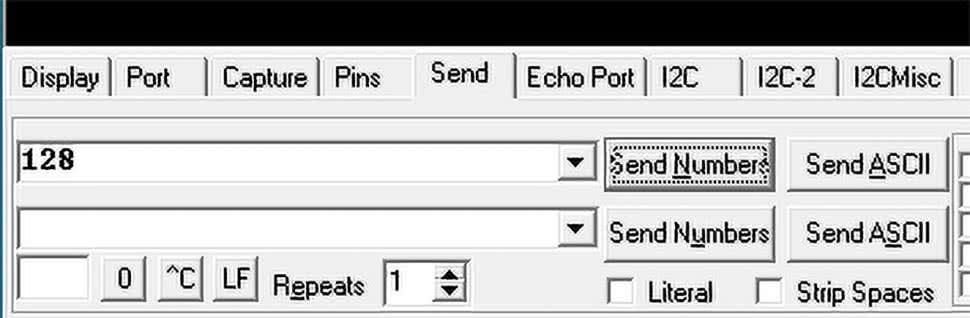
Dzięki temu wpisany tekst zostanie zinterpretowany jako liczba dziesiętna, a nie ciąg znaków ASCII. Gdy wyślemy 0, diody zgasną, a gdy 255, będą świecić z pełną jasnością.
Podsumowanie
W tym odcinku uruchomiliśmy odbiornik portu szeregowego, dzięki czemu dysponujemy już pełną obsługą tego interfejsu. Następnie przygotowaliśmy prosty generator sygnału PWM i przetestowaliśmy jego działanie. W kolejnej części użyjemy go do zbudowania generatora przebiegu sinusoidalnego, za pomocą którego będziemy sterować membraną piezoelektryczną.
Rafał Kozik
rafkozik@gmail.com
[1] Repozytorium z przykładami http://bit.ly/33uYPxs